matlab如何标定相机内外参和畸变参数
发布时间:2024年01月04日
关于内外参矩阵和畸变矩阵可以学习
https://blog.csdn.net/qq_30815237/article/details/87530011?spm=1001.2014.3001.5506
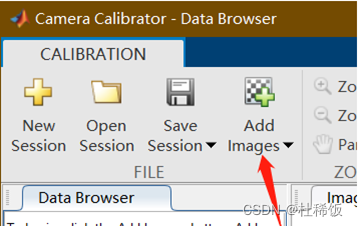
在APP中找到 camera Calibrator

? ? ? ? 点击 Add Images,导入拍照图片。标定20张左右就够了,然后角度变一下,但不需要变太大,太大了会影响标定效果。标定板最好在视场中心,且占据较大面积。
? ? ? ? ?
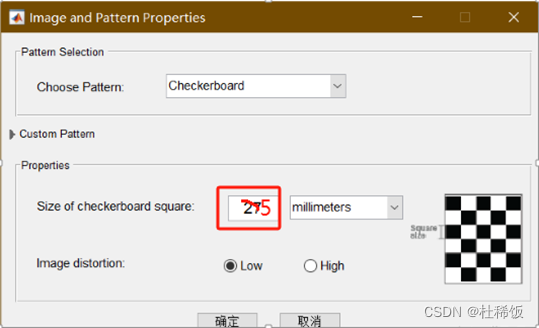
?修改棋盘格大小,我的是5
对于标准相机,菜单栏的option里选择三阶径向畸变和斜切:
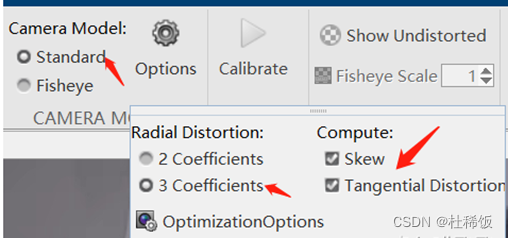
?而鱼眼相机,选择

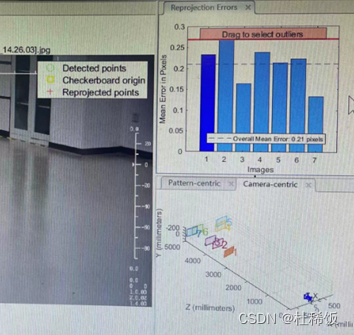
点击Calibrate,进行相机标定:
右上角是重建平均误差,只要平均误差小于0.5,就可以认为这是相机标定的结果是可靠的。我试了一下0.3以下误差更小。

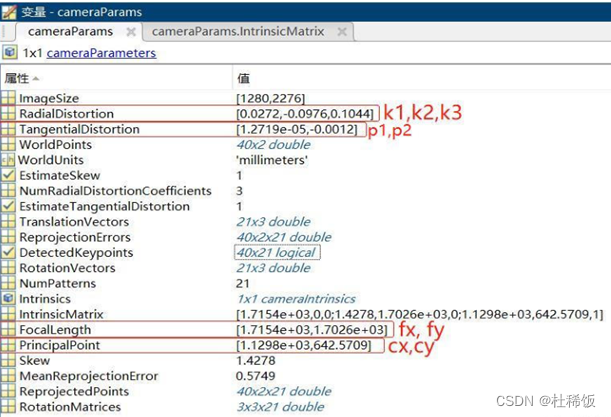
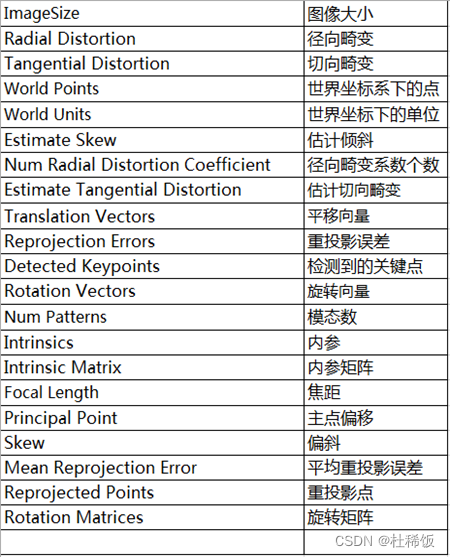
?把相机参数导出来,点击 Export Camera Parameters。点击确定,就可以看到matlab工作区出现了相机参数。点开这个参数,就可以得到相机的各个参数:

?
如果别人保存下来的这参数,在自己的matlab上打不开,可以点“布局”?,把变量的窗口打开。
如果是隐藏的话,命令行看着没什么问题,但是参数就是不显示。


文章来源:https://blog.csdn.net/weixin_40787463/article/details/135380145
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- linux配置定时任务
- 【前端HTML】HTML基础
- 【数据挖掘、数据分析】之用户画像平台构建与业务实践
- MySQL数据库索引优化实战
- Java毕业设计——基于SpringBoot的健身房管理系统
- linux离线和在线安装docker
- 大众汽车智能化提速:从智驾安全到电池安全全线武装
- K8S(一)—安装部署
- 【ros2 control 机器人驱动开发】简单双关节机器人学习-example 1
- ICP(Index Condition Pushdown)索引下推