SPI知识大全
SPI介绍
SPI(Serial Peripheral Interface)是一种常用的通信接口,用于在两个设备之间进行数据传输。它通常用于板级通信,具有高速、简单和低成本的特点,广泛应用于各种电子设备中。
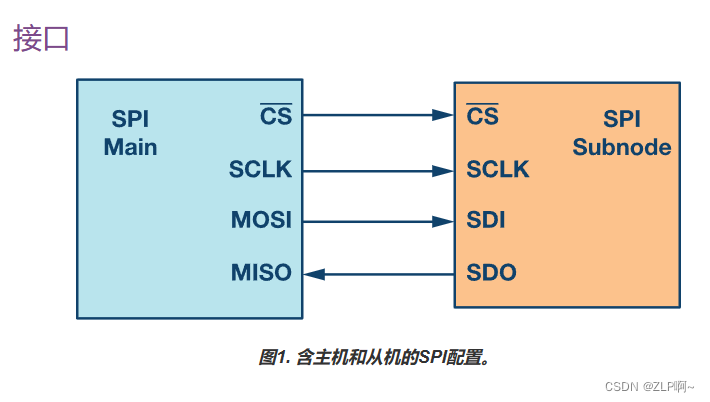
SPI 通信是通过使用 4 条信号线来实现的,分别是:
- MISO 主设备数据输入,从设备数据输出。
- MOSI 主设备数据输出,从设备数据输入。
- SCLK 时钟信号,由主设备产生。
- SS 从设备片选信号,由主设备控制(CS、NSS)。
SPI分为硬件SPI与软件SPI
硬件 SPI 是指在硬件层面上实现 SPI 通信的功能。相比于软件 SPI,硬件 SPI 可以提供更高的速度和更准确的数据传输,并且不需要占用 CPU 资源,因此在一些高速和实时性要求高的场合中得到了广泛应用。
硬件 SPI 通常由一组专用的集成电路(IC)或外设来实现,例如:
- SPI 控制器:一种专门用于管理 SPI 通信的 IC,可以实现信号转换、时序控制和数据传输等功能。
- SPI 收发器:一种用于发送和接收 SPI 数据的设备,通常与 SPI 控制器配合使用。
- SPI 存储器:一种用于存储数据的 SPI 设备,通常用于数据存储器或程序存储器。
在实际应用中,我们可以根据需要选择不同的硬件 SPI 设备,并通过 SPI 控制器或软件驱动程序来控制它们的操作。
软件 SPI 通常通过直接操作微控制器的 I/O 引脚来实现数据传输。微控制器通常提供一组寄存器来配置 SPI 通信参数,例如时钟频率、数据位宽和模式等。通过访问这些寄存器,我们可以控制微控制器的 I/O 引脚输出时钟信号、发送和接收数据。
在实际应用中,软件 SPI 的实现方式因微控制器和操作系统的不同而有所差异。常见的软件 SPI 实现方法包括:
- 裸机代码:在没有操作系统的情况下,通过直接操作微控制器的寄存器和 I/O 引脚实现 SPI 通信。
- 嵌入式操作系统驱动程序:在有操作系统的情况下,通过编写嵌入式操作系统的 SPI 驱动程序,实现 SPI 通信。
- 高级编程库:一些高级编程语言(如 C++、Java 等)提供了用于实现 SPI 通信的库,可以简化编程工作。
软件 SPI 的优点是可以在低成本的微控制器平台上实现,缺点是速度较慢,并且需要占用一定的 CPU 资源。因此,在高速和实时性要求高的场合中,通常需要采用硬件 SPI。
SPI工作模式和时序图
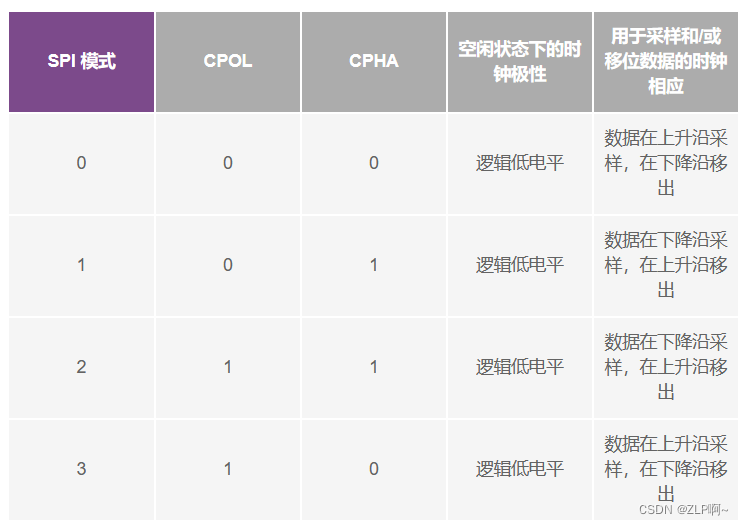
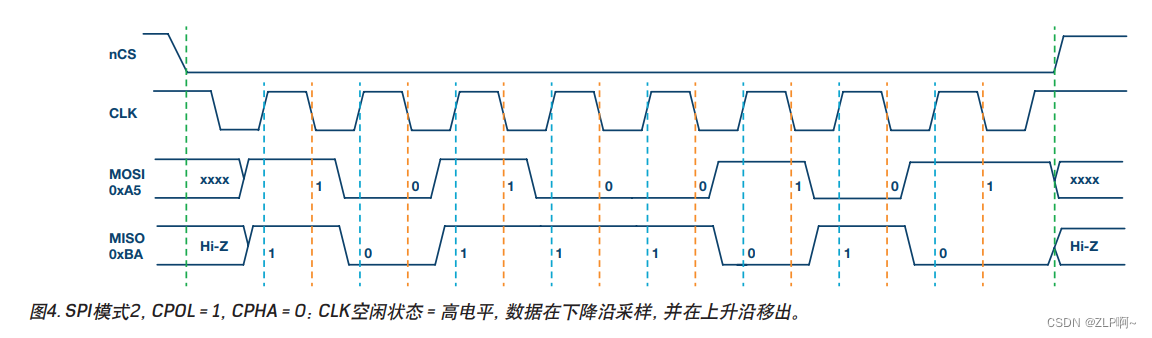
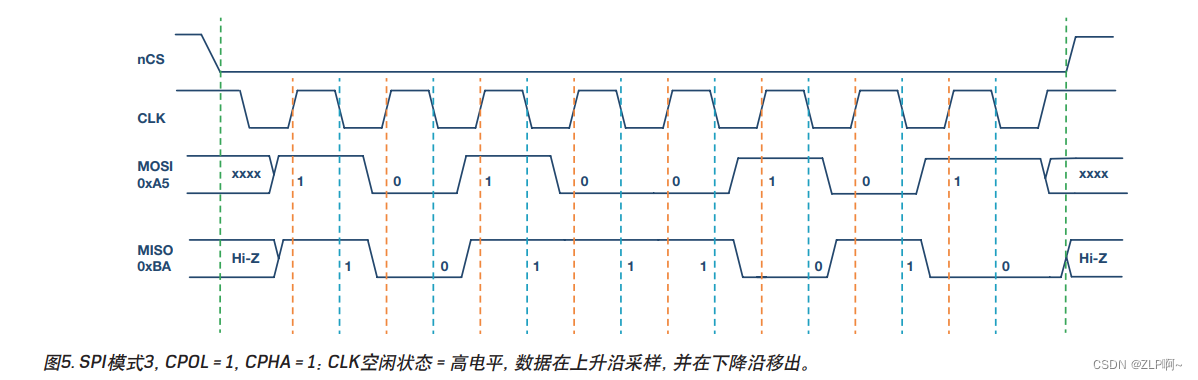
SPI总线有四种工作模式,分别是MODE 0、MODE 1、MODE 2和MODE 3。这四种模式由时钟极性(CPOL)和时钟相位(CPHA)的组合决定。
- CPOL:这是时钟极性选择,决定了SPI总线空闲时的时钟信号电平。当CPOL为0时,SPI总线空闲时为低电平;当CPOL为1时,SPI总线空闲时为高电平。
- CPHA:这是时钟相位选择,决定了在时钟信号的哪个跳变沿进行数据采样。当CPHA为0时,在SCK的第一个跳变沿(即上升沿或下降沿)进行数据采样;当CPHA为1时,在SCK的第二个跳变沿进行数据采样。
根据CPOL和CPHA的不同组合,有四种工作模式:
-
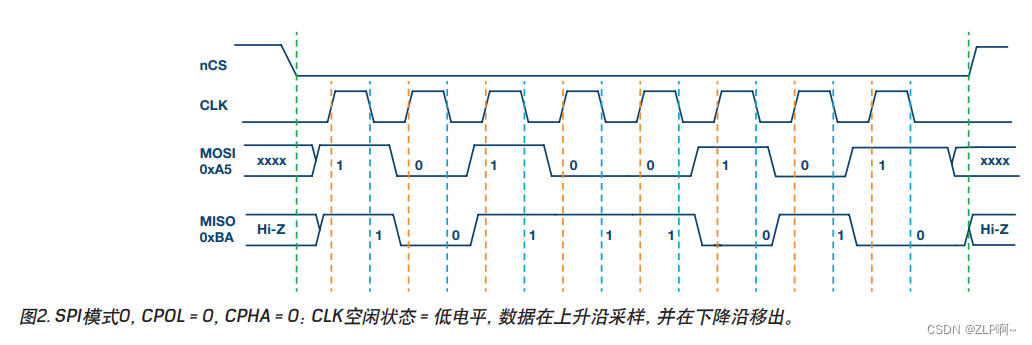
MODE 0(CPOL=0,CPHA=0):在SCK的每个上升沿进行数据采样,数据在SCK的第二个跳变沿(即下降沿)改变。
-
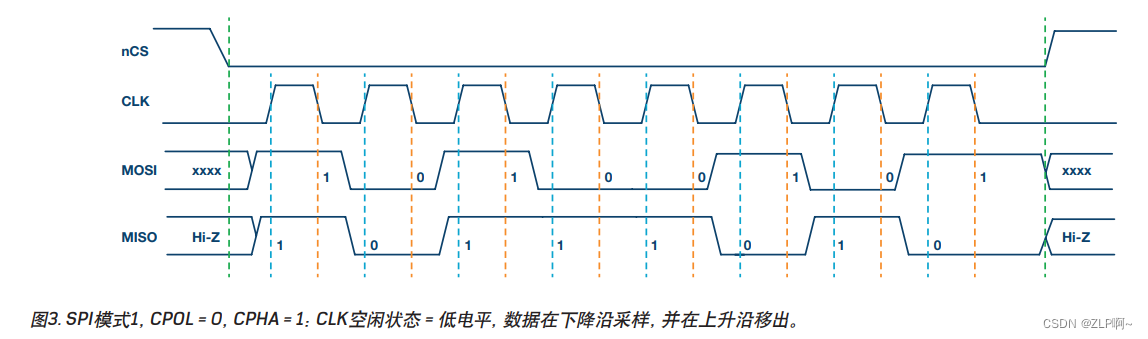
MODE 1(CPOL=0,CPHA=1):在SCK的每个下降沿进行数据采样,数据在SCK的第二个跳变沿(即上升沿)改变。
-
MODE 2(CPOL=1,CPHA=0):在SCK的每个下降沿进行数据采样,数据在SCK的第二个跳变沿(即下降沿)改变。
-
MODE 3(CPOL=1,CPHA=1):在SCK的每个上升沿进行数据采样,数据在SCK的第二个跳变沿(即上升沿)改变。
这四种工作模式提供了不同的时钟配置选项,以满足不同的数据传输需求。其中,MODE 0和MODE 3是最常用的工作模式。
硬件SPI编写
在 STM32 微控制器平台上实现硬件 SPI 通信,需要进行以下配置:
- 启用 SPI 模块:首先需要在微控制器的寄存器中启用 SPI 模块。这可以通过设置相关的位来实现。
- 设置 SPI 模式:STM32 的 SPI 模块支持多种不同的模式,例如全双工、半双工、单工等。需要根据实际需要选择适当的模式。
- 设置 SPI 时钟频率:STM32 的 SPI 模块可以支持不同的时钟频率,需要根据实际需要设置适当的时钟频率。
- 设置 SPI 数据格式:STM32 的 SPI 模块支持 8 位和 16 位数据格式,需要根据实际需要设置适当的数据格式。
- 设置 SPI 片选信号:STM32 的 SPI 模块支持多个片选信号,需要根据实际需要设置适当的片选信号。
- 设置 SPI 数据传输方向:STM32 的 SPI 模块支持数据的单向和双向传输,需要根据实际需要设置适当的数据传输方向。
- 初始化 SPI 模块:完成以上配置后,需要对 SPI 模块进行初始化,包括设置相关的寄存器和初始状态。
- 发送和接收数据:通过 SPI 模块的发送和接收函数,可以实现数据的发送和接收。
以上是在 STM32 微控制器平台上实现硬件 SPI 通信的一般步骤。具体的配置和实现方式可能因不同的微控制器和固件版本而有所差异,需要根据官方文档或参考代码进行具体操作。
软件SPI编写
如果要写一个软件SPI我们可能就需要配置一些IO来控制,像片选。然后设置寄存器,like时钟极性、相位。按照时序的逻辑,拉高拉低片选等等。
以下为一个简单的示例:
#include <stdio.h>
#include <stdint.h>
#define SPI_CS_LOW() PORTB &= ~(1<<PB2) // 片选信号拉低
#define SPI_CS_HIGH() PORTB |= (1<<PB2) // 片选信号拉高
void SPI_Init(void) {
// 初始化SPI相关寄存器,这里以STM32为例
// 设置SPI为Master模式,时钟极性为0,时钟相位为0
SPI1->CR1 = SPI_CR1_MSTR | SPI_CR1_CPOL_0 | SPI_CR1_CPHA_0;
// 设置数据传输位数为8位
SPI1->CR2 = SPI_CR2_DS_16 | SPI_CR2_SSM | SPI_CR2_LSBFIRST;
}
uint8_t SPI_Transfer(uint8_t data) {
SPI_CS_LOW(); // 片选信号拉低
while(!(SPI1->SR & SPI_SR_TXE)); // 等待发送缓冲区空闲
SPI1->DR = data; // 发送数据到发送缓冲区
while(!(SPI1->SR & SPI_SR_RXNE)); // 等待接收缓冲区非空
data = SPI1->DR; // 从接收缓冲区读取数据
SPI_CS_HIGH(); // 片选信号拉高
return data;
}
int main(void) {
SPI_Init(); // 初始化SPI
uint8_t data = 0x55;
while(1) {
data = SPI_Transfer(data); // 发送并接收数据
printf("Received data: %02X\n", data);
}
return 0;
}
拓展:
问:SPI是全双工还是半双工?
答:全双工
实际使用的时候根据情况而定,可是全双工也可以是半双工(功耗低)
问:SPI与IIC那个快?
答:SPI
因为SPI是全双工,IIC的不是。SPI没有定义速度限制,一般的实现通常能达到甚至超过10Mbps。IIC最高的速度也就快速+模式(1Mbps)和高速模式(3.4Mbps),后面的模式还需要额外的I/O缓冲区,还并不是总是容易实现的。
问:SPI有哪些应用?
答:EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间手机、数码、液晶显示器、机顶盒。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 电脑提示loadperf.dll文件丢失,导致游戏或程序无法运行,快速修复方法
- 第2课 用FFmpeg连接rtmp服务器
- 自定义html5中日期选取器的样式
- 家政服务小程序搭建,有什么优势?
- 高分通过HarmonyOS基础认证-必学HarmonyOS第一课_附题库答案【官网课程提炼关键知识点-精炼】【鸿蒙专栏-26】
- 堆排序,计数排序,桶排序,基数排序(2024-01-23)
- 【Linux C | 进程】创建进程 | fork函数详解
- unity HoloLens2开发,使用Vuforia识别实体 触发交互(二)(有dome)
- Pandas.DataFrame.iloc[ ] 筛选数据-自然索引法 详解 含代码 含测试数据集 随Pandas版本持续更新
- 2. 两数相加