基于单片机的语音识别自动避障小车(论文+源码)
发布时间:2023年12月26日
1.系统设计
此次基于单片机的语音识别自动避障小车,以STC89C52单片机作为系统的主控制器,利用超声波模块来实现小车与障碍物距离的测量并通过LCD液晶显示,当距离低于阈值时会通过WT588语音模块进行报警提示,并且小车会后退来躲避障碍物;采用LD3320语音识别模块来实现语音控制功能,用户可以发出特定的语音指令,如“左转”,“停止”等命令来对小车进行控制;在小车的运动控制上,则采用的是TB6612驱动器来驱动电机,从而控制小车运动。本次设计的系统框架如图2.1所示。
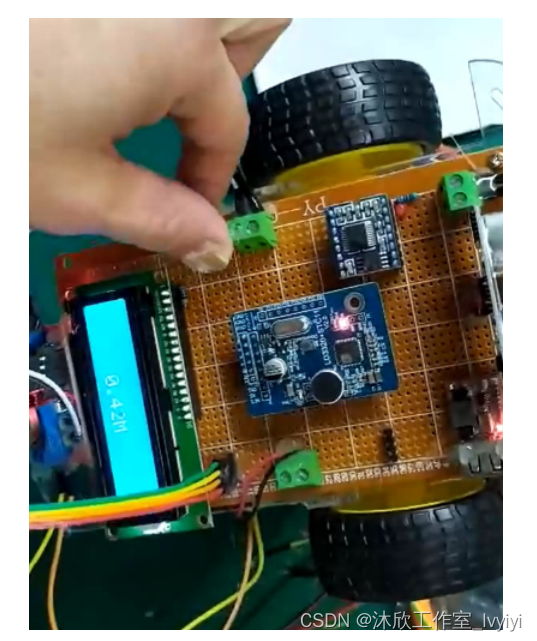
 2.实物展示
2.实物展示
文章来源:https://blog.csdn.net/lvpeng7446281/article/details/135218845
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章