基于51单片机的pwm直流电机调速霍尔元件测速系统(可实现按键控制、蓝牙控制、语音控制)(包含所有资料)
一、项目简介
? ? ? ? 本项目使用stc89c52rc作为主控芯片所有元器件pcb版图均使用嘉立创绘制,结构原理简单适合一般51单片机课程设计参考。本项目基础功能为按键控制直流电机加减速、正反转。LCD1602显示电机工作状态,占空比/挡位,转速。直流电机测速使用的是霍尔元件,霍尔元件的电路原理这里就不再赘述了,大致就是检测到靠近霍尔元件的磁极变化输出电平会反转,通过电平反转可以得到脉冲,我并没有购买径向多级磁铁(主要是没找到不要运费的)。在转盘或者叶子上用502沾一个小磁铁,一定要搞清楚你的霍尔元件是哪一级电平跳变,不要沾反了那样就测不出来转速了。这样的话,电机每转一圈霍尔元件就会向单片机输出一个脉冲,通过换算和程序定时可以计算出电机转速,不过这个值只是大概值并不准确,大概的话只能精确到十位,个位就没办法了。protues仿真中的编码器电机默认是一圈24个脉冲,这样的话大概就可以准确到小数点后一位。(亲测有效)。
二、实物图

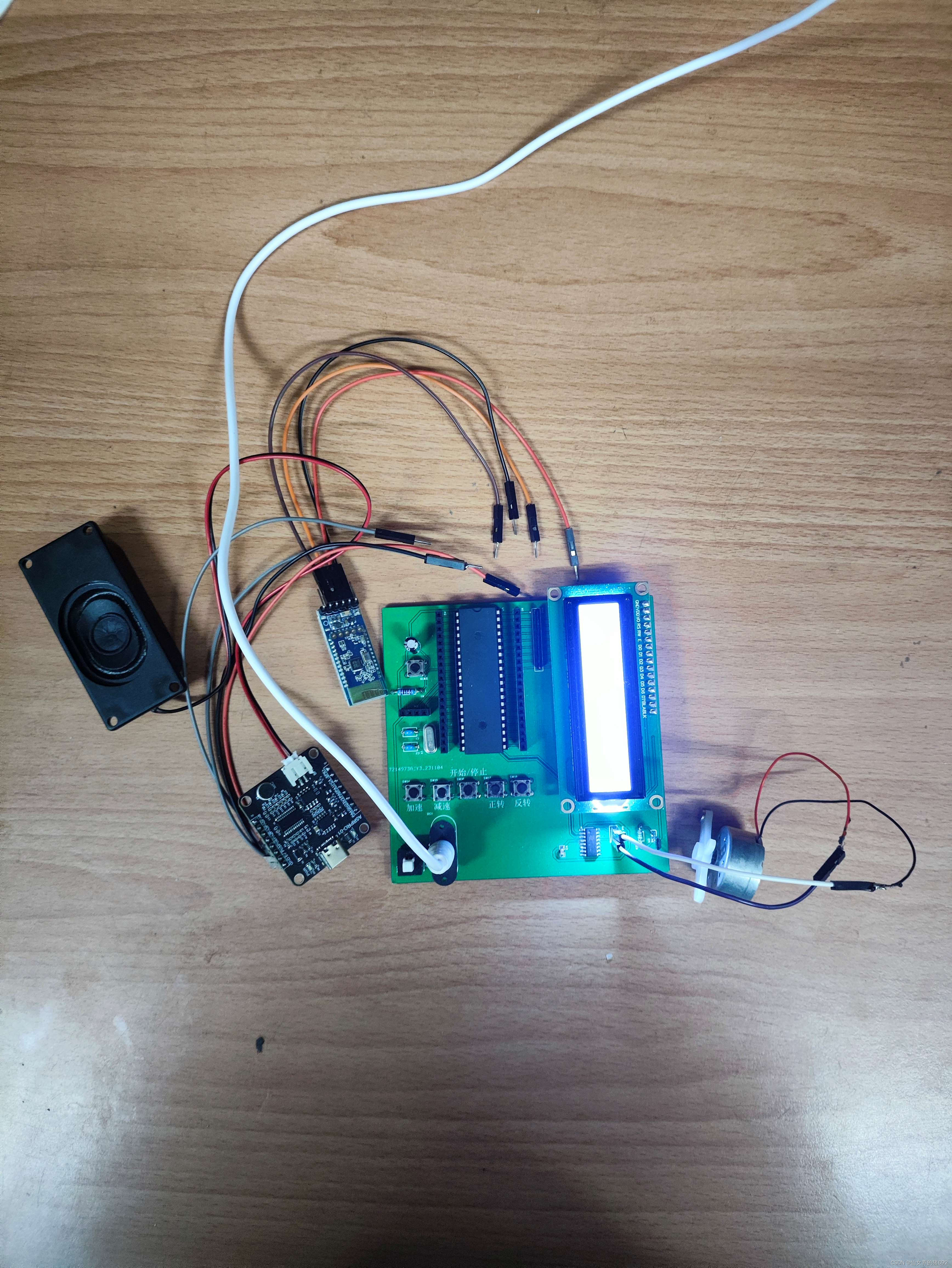
蓝牙模块采用的是hc05,语音识别模块采用的是AROPRO天问开发板,电机是R300C直流小电机通过usb转dc 5v电源线供电。
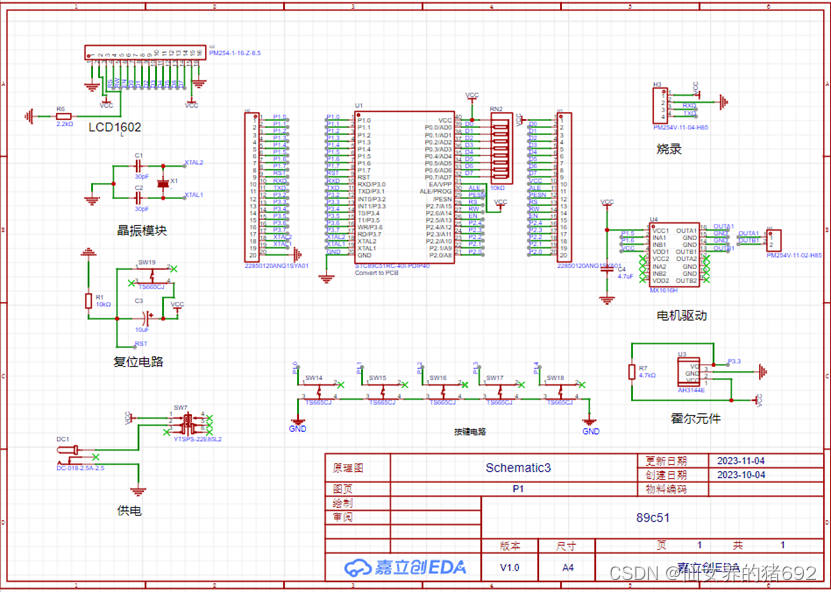
三、原理图
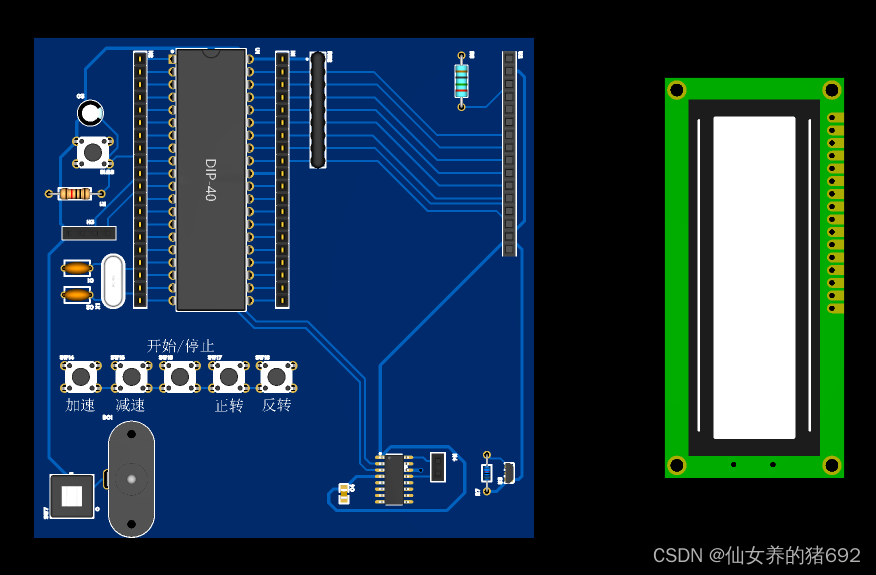
四、PCB

?
五、代码
?因为篇幅有限这里就只放按键控制和蓝牙(可同时控制不冲突)代码
#include <REGX52.H>
sbit Motor_straight=P1^5;
sbit Motor_reverse=P1^6;
//LCD1062引脚配置:
sbit LCD_RS=P2^7;
sbit LCD_RW=P2^6;
sbit LCD_EN=P2^5;
#define LCD_DataPort P0
unsigned char count_f=0,receiveData,KeyNum; //编码器脉冲数
unsigned char count_10ms=0; //10ms计数
float speed_real=0; //转速中间变量
unsigned int speed_result=0; //转速r/min
unsigned char count_motor=0; //滤波变量
unsigned char Counter,Compare=0; //计数值和比较值,用于输出PWM
unsigned char Speed,straight=1,reverse=0,on=0;
void Delay(unsigned int xms) //延时函数
{
unsigned char i, j;
while(xms--)
{
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
}
}
unsigned char Key() //按键扫描
{
unsigned char KeyNumber=0;
if(receiveData==0x01 || P1_0==0){Delay(20);while(receiveData==0x01 || P1_0==0);Delay(20);KeyNumber=1;}
if(receiveData==0x02 || P1_1==0){Delay(20);while(receiveData==0x02 || P1_1==0);Delay(20);KeyNumber=2;}
if(receiveData==0x03 || P1_2==0){Delay(20);while(receiveData==0x03 || P1_2==0);Delay(20);KeyNumber=3;}
if(receiveData==0x04 || P1_3==0){Delay(20);while(receiveData==0x04 || P1_3==0);Delay(20);KeyNumber=4;}
if(receiveData==0x05 || P1_4==0){Delay(20);while(receiveData==0x05 || P1_4==0);Delay(20);KeyNumber=5;}
return KeyNumber;
}
void timer_Init()
{
TMOD=0X11;
TL0 = 0x9C; //设置定时器初值100us
TH0 = 0xFF;
TH1=0XD8; //设置定时器初值10ms
TL1=0XF0;
TF0=0; //清除溢出标志
TF1=1;
ET0=1; //定时中断允许
ET1=1;
EA=1; //总中断
IT1=1; //外部中断
EX1=1; //下降沿触发
TR0=1; //定时器开
TR1=1;
}
void Uart_Init() //9600bps@11.0592MHz
{
RCAP2L=0xD9;//9600波特率对应 FFD9,低位为D9
RCAP2H=0xFF;//高位为FF
T2CON=0x34;//RCLK、TCLK、TR2置1
SCON=0x50;//串口工作模式1,接收使能
ES=1;//打开接收中断
EA=1;//打开总中断
}
void LCD_Delay() //LCD1602延时函数,12MHz调用可延时1ms
{
unsigned char i, j;
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
}
void LCD_WriteCommand(unsigned char Command) //LCD1602写命令
{
LCD_RS=0;
LCD_RW=0;
LCD_DataPort=Command;
LCD_EN=1;
LCD_Delay();
LCD_EN=0;
LCD_Delay();
}
void LCD_WriteData(unsigned char Data) //LCD1602写数据
{
LCD_RS=1;
LCD_RW=0;
LCD_DataPort=Data;
LCD_EN=1;
LCD_Delay();
LCD_EN=0;
LCD_Delay();
}
void LCD_SetCursor(unsigned char Line,unsigned char Column) //LCD1602设置行,列数 1~2行,1~16列
{
if(Line==1)
{
LCD_WriteCommand(0x80|(Column-1));
}
else if(Line==2)
{
LCD_WriteCommand(0x80|(Column-1+0x40));
}
}
void LCD_Init() //LCD1602初始化函数
{
LCD_WriteCommand(0x38);//八位数据接口,两行显示,5*7点阵
LCD_WriteCommand(0x0c);//显示开,光标关,闪烁关
LCD_WriteCommand(0x06);//数据读写操作后,光标自动加一,画面不动
LCD_WriteCommand(0x01);//光标复位,清屏
}
在LCD1602指定位置上显示一个字符
//void LCD_ShowChar(unsigned char Line,unsigned char Column,char Char)
//{
// LCD_SetCursor(Line,Column);
// LCD_WriteData(Char);
//}
//在LCD1602指定位置开始显示所给字符串
void LCD_ShowString(unsigned char Line,unsigned char Column,char *String)
{
unsigned char i;
LCD_SetCursor(Line,Column);
for(i=0;String[i]!='\0';i++)
{
LCD_WriteData(String[i]);
}
}
//返回值=X的Y次方
int LCD_Pow(int X,int Y)
{
unsigned char i;
int Result=1;
for(i=0;i<Y;i++)
{
Result*=X;
}
return Result;
}
//在LCD1602指定位置开始显示所给数字
//Line 起始行位置,范围:1~2
//Column 起始列位置,范围:1~16
//Number 要显示的数字,范围:0~65535
//Length 要显示数字的长度,范围:1~5
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{
unsigned char i;
LCD_SetCursor(Line,Column);
for(i=Length;i>0;i--)
{
LCD_WriteData(Number/LCD_Pow(10,i-1)%10+'0');
}
}
void main()
{
Uart_Init();
timer_Init();
LCD_Init();
LCD_ShowString(2,1,"DC:");
LCD_ShowNum(2,4,Compare,3);
LCD_ShowString(1,1,"RPM:");
LCD_ShowNum(1,6,speed_result,4);
while(1)
{
LCD_ShowNum(1,6,speed_result,4);
//LCD_ShowChar(1,12,'.');
//LCD_ShowNum(1,13,speed_result%10,1);
KeyNum=Key();
if(KeyNum==1)
{
Speed++;
if(Speed==0){Compare=0;} //设置比较值,改变PWM占空比
if(Speed==1){Compare=50;LCD_ShowNum(2,4,Compare/2,3);}
if(Speed==2){Compare=75;LCD_ShowNum(2,4,Compare/2,3);}
if(Speed==3){Compare=100;LCD_ShowNum(2,4,Compare/2,3);}
if(Speed==4){Compare=150;LCD_ShowNum(2,4,Compare/2,3);}
if(Speed==5){Compare=175;LCD_ShowNum(2,4,Compare/2,3);}
if(Speed>=6){Speed=6;Compare=200;LCD_ShowNum(2,4,Compare/2,3);}
}
if(KeyNum==2)
{
Speed--;
if(Speed>100){Speed=0;}
if(Speed==0){Compare=0;LCD_ShowNum(2,4,Compare,3);} //设置比较值,改变PWM占空比
if(Speed==1){Compare=50;LCD_ShowNum(2,4,Compare/2,3);}
if(Speed==2){Compare=75;LCD_ShowNum(2,4,Compare/2,3);}
if(Speed==3){Compare=100;LCD_ShowNum(2,4,Compare/2,3);}
if(Speed==4){Compare=150;LCD_ShowNum(2,4,Compare/2,3);}
if(Speed==5){Compare=175;LCD_ShowNum(2,4,Compare/2,3);}
if(Speed>=6&&Speed<100){Compare=200;LCD_ShowNum(2,4,Compare/2,3);}
}
if(KeyNum==3)
{
on=1-on;
}
if(KeyNum==4){straight=1;reverse=0;}
if(KeyNum==5){reverse=1;straight=0;}
if(on==1){LCD_ShowString(1,13,"ON ");}
else{LCD_ShowString(1,13,"OFF");}
if(straight==1){LCD_ShowString(2,8,"Straight");}
else{LCD_ShowString(2,8,"Reverse ");}
}
}
void INT1_Routine() interrupt 2 //外部中断1中断函数
{
count_f++;
}
void Timer0_Routine() interrupt 1
{
TL0 = 0x9C; //设置定时初值
TH0 = 0xFF; //设置定时初值
Counter++;
Counter%=200; //计数值变化范围限制在0~199
if(on==1)
{
if(straight==1)
{
if(Counter>Compare) //计数值大于比较值
{
Motor_straight=1; //输出1
Motor_reverse=1;
}
else //计数值小于比较值
{
Motor_straight=0; //输出0
Motor_reverse=1;
}
}
if(reverse==1)
{
if(Counter>Compare) //计数值大于比较值
{
Motor_straight=1;
Motor_reverse=1;
}
else //计数值小于比较值
{
Motor_straight=1;
Motor_reverse=0;
}
}
}
if(on==0)
{Motor_straight=1;Motor_reverse=1;}
}
void Timer1_Routine() interrupt 3
{
TH1=0XD8;
TL1=0XF0;
count_10ms++;
if(count_10ms==100)
{
count_motor=count_f+count_motor;
count_f=0;
}
if(count_10ms==200)
{
count_10ms=0;
count_motor=count_f+count_motor;
speed_real=count_motor*1.0; //每秒圈数
speed_result=(int)(speed_real*30); //每分钟转圈数
count_f=0;
count_motor=0;
}
}
void UART_INTERRUPT() interrupt 4
{
if(RI==1)
{
receiveData=SBUF;
RI = 0;
}
}六、仿真

仿真我并没有使用电机驱动芯片,而是自己画了一个H桥方便对直流电机调速更好的理解,实物也试过自己焊H桥电路,不过因为电阻选的过大导致电机供电不足转的太慢了,时间紧迫后来就焊了个电机驱动芯片上面。感兴趣的朋友也可以自行试试。仿真代码略有不同。
七、语音驱动模块
这个在购买语音模块时会有足够的参考资料,而且是图形化编程相对容易,同样是通过串口于单片机通讯,与蓝牙驱动代码略有不同,单总体区别不大。
八、总结
????????这个小项目是本人完成的一个单片机课设,所述内容均已验证完美实现,欢迎大佬们指正,后续我会将所有相关资料整理附上供大家参考,有任何问题可在评论区留言,都会回复。谢谢!?
资料自取:
所有资料均为工程文件,可直接使用,PCB板是第二个可以直接下单打板
http://链接:https://pan.baidu.com/s/1iiy16bHN8aRl_UsdJb6Rag?pwd=cson 提取码:cson
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 1. 私有云实战之基础环境搭建
- 今年的年终奖开了个寂寞
- AI论文范文:AIGC中的图像转视频技术研究
- HTTP客户端Feign
- 七大设计原则(一句话总结)
- oracle 19c容器数据库data dump数据泵传输数据(4)---网络传输
- H5112C PWM调光 无频闪 高性价比 支持12V 24V 36V 48V 60V 72V 内置MOS
- 多开Windows10系统版本详解
- [VUE]3-路由
- 【开源】基于JAVA语言的智慧社区业务综合平台