固定翼仿真的切换
发布时间:2024年01月10日
delta固定翼飞行器模型
接着这篇文章文章链接,我们对飞行器模型进行改进,
我们知道,我们打开仿真模型
gazebo --verbose zephyr_ardupilot_demo.world
 我们注意这最后一个语句
我们注意这最后一个语句
<model name="zephyr_delta_wing_demo">//加载zephyr_delta_wing_demo的模型文件
<pose>0 0 0.2 0 0 0</pose>
<include>
<uri>model://zephyr_delta_wing_ardupilot_demo</uri>//加载zephyr_delta_wing_demo的模型文件
<pose>0 0 0 0 0 0</pose>
</include>
</model>
zephyr_delta_wing_demo:SDF文件构建的模型名称
zephyr_delta_wing_ardupilot_demo:整个构建模型的文件名
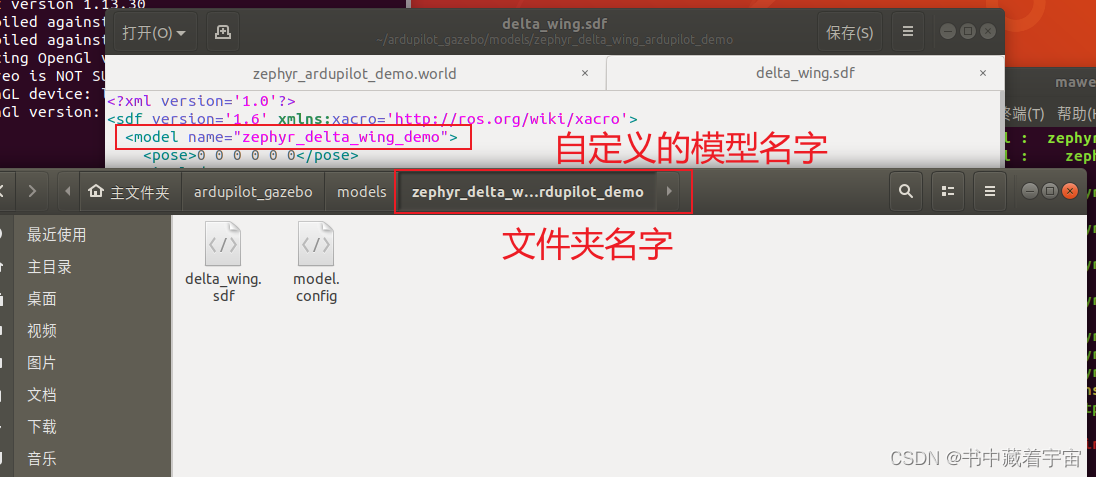
如果我们对他进行更改模型的话,就需要对这两个进行更改即可。
我们打开vehicleinfo.py文件,里面就有所有的飞机类型,通过字典形式进行封装。
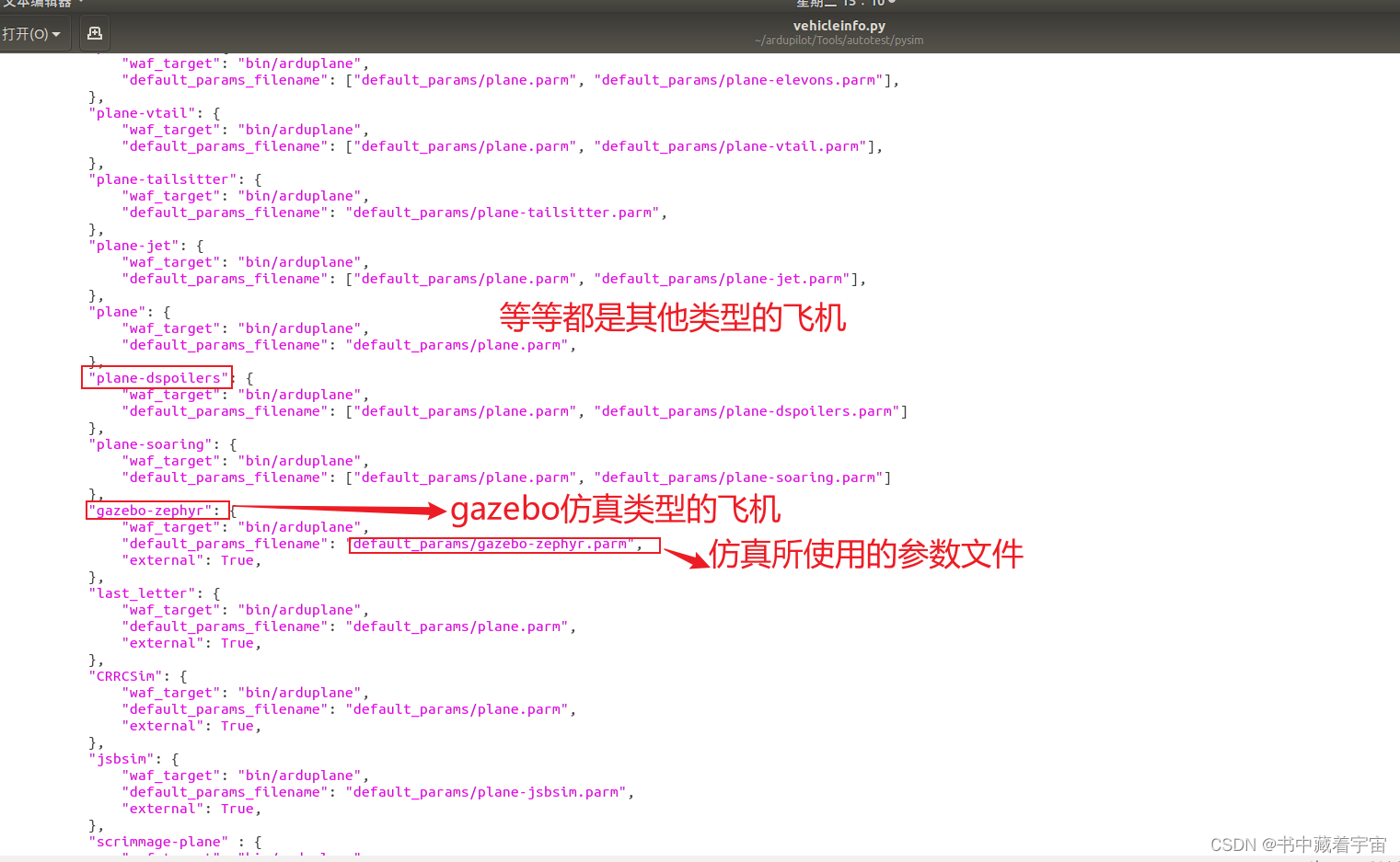
表示一种特定于 Gazebo 仿真环境的飞机,可能是用于特殊用途或研究的模型。
参考文章建议
这里我特别推荐的三篇文章:
APM的仿真环境配置
西北工业大学实验室博客
文章来源:https://blog.csdn.net/m0_49586319/article/details/135465508
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章