线性PID控制器
发布时间:2024年01月02日
线性PID控制器
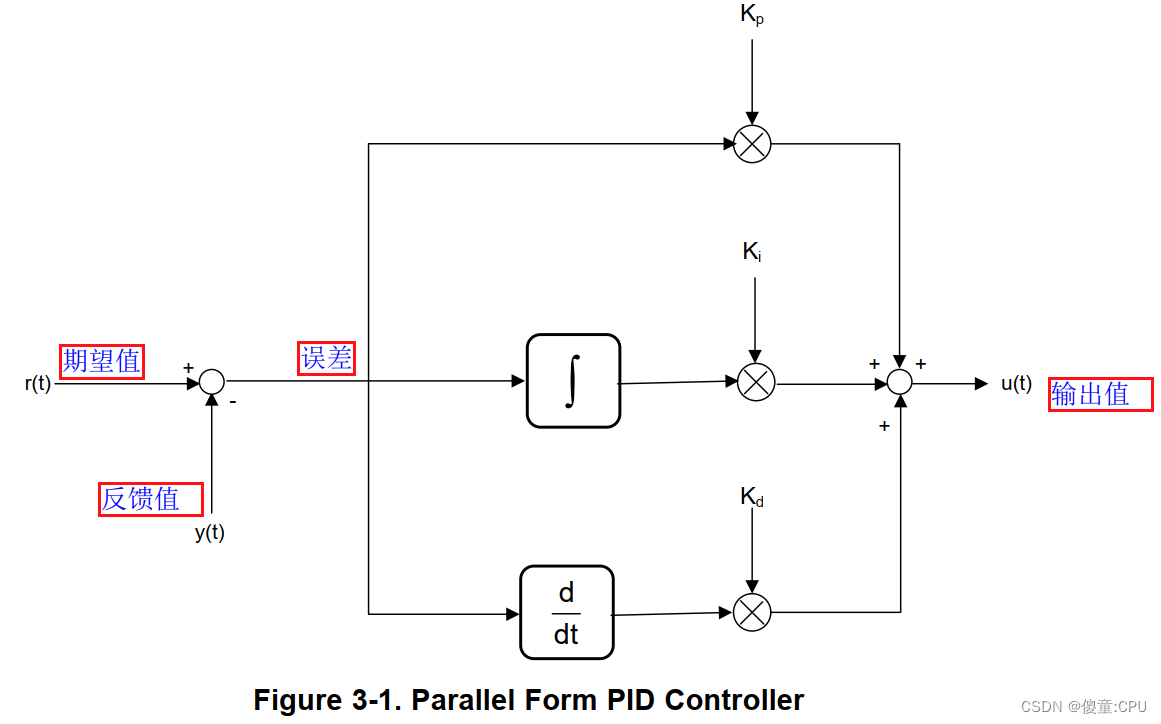
PID 控制器输出是分别作用于误差、误差积分和误差导数的三条路径的并行和。每条路径的相对权重由用户调整,以优化暂态响应。
输出表达式
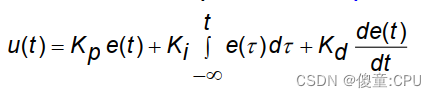
控制器包括三个并联连接的独立路径。
比例。上路径包含一个可调增益项(Kp),其作用是固定控制系统的开环增益。由于回路增益与这一项成正比,故 Kp 称为比例增益。
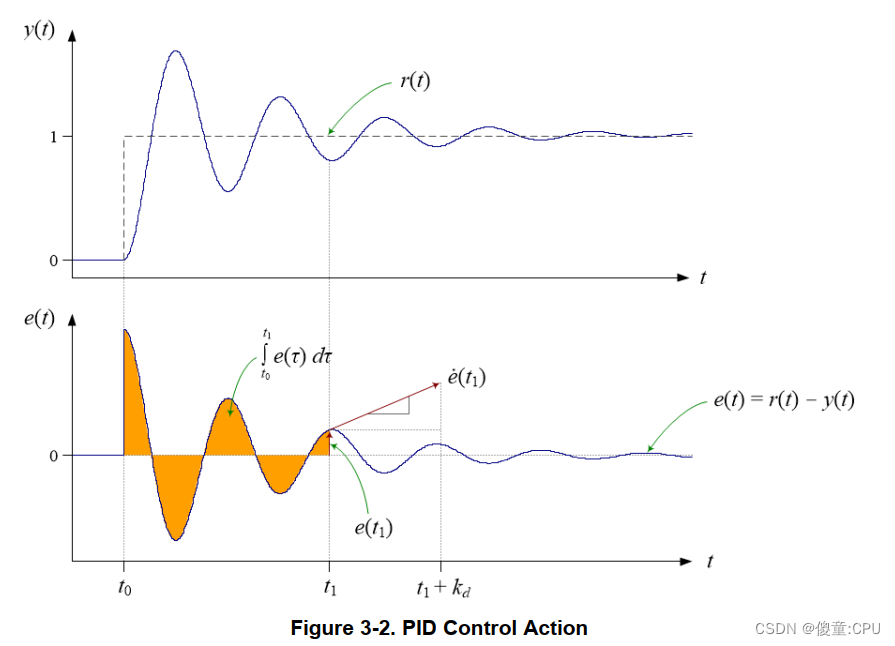
积分器。积分路径的主要作用是消除稳态误差。积分增益项的作用是改变这种情况发生的速率。
微分器。每当误差的变化率很大时,这条路径的输出就很大。导数作用的主要作用是抑制振荡和减少瞬态。
实 现
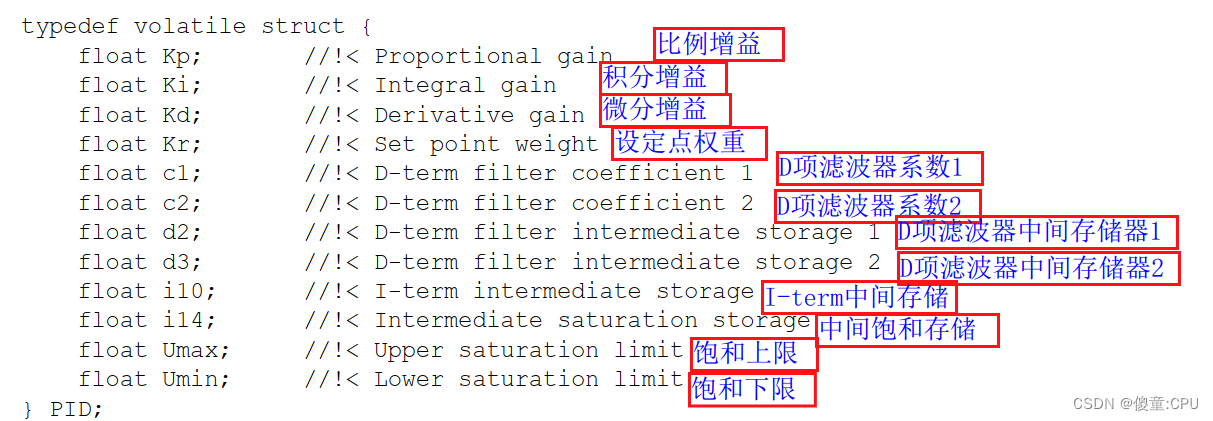
DCL中的线性 PID 控制器包括以下特 点:
?并联和理想形式
?可编程输出饱和
?比例路径上的独 立 参 考 权 重
?反上发条积分器复位
?可编程低 通 导 数滤 波 器
?外部饱和输入的积分器 抗绕 组
?输出饱和可调
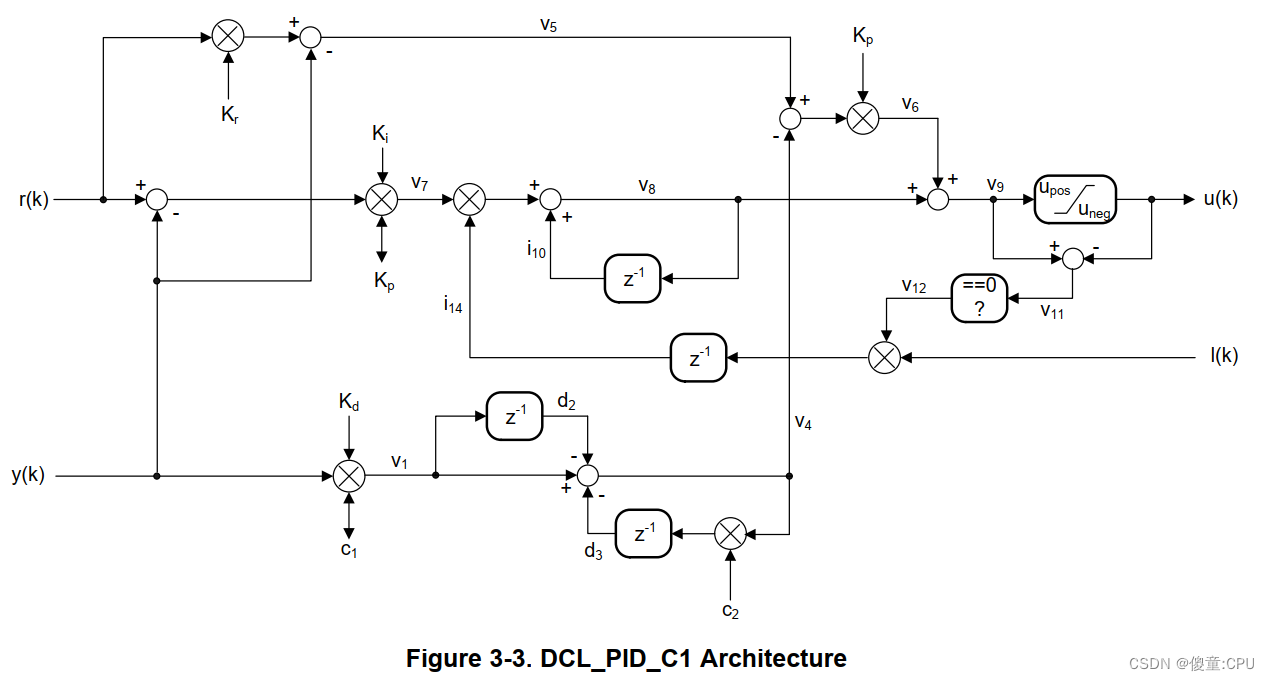
库中所有的 PID 类型控制器都以类似的方式实现反清零。在控制器输出端有一个钳位,允许用户设置控制工作量的上限和下限。如果超过任何一个限制,则内部浮点控制器变量从 1.0f 变为 0.0f。这个变量乘以积分器输入,这样积分器在输出饱和时累积连续的零数据,避免了众所周知的上弦现象。
库中的 PID 控制器为从环路的外部部分触发的反绕组复位提供了条件。这在控制器外部元件饱和的情况下很有用。在正常和饱和条件下,浮点变量“ lk” 预计分别为 1.0f 或 0.0f。如果不需要此功能,则应将“ lk”参数设置为 1.0f 来调用函数。 PI 控制器上不提供外部饱和。
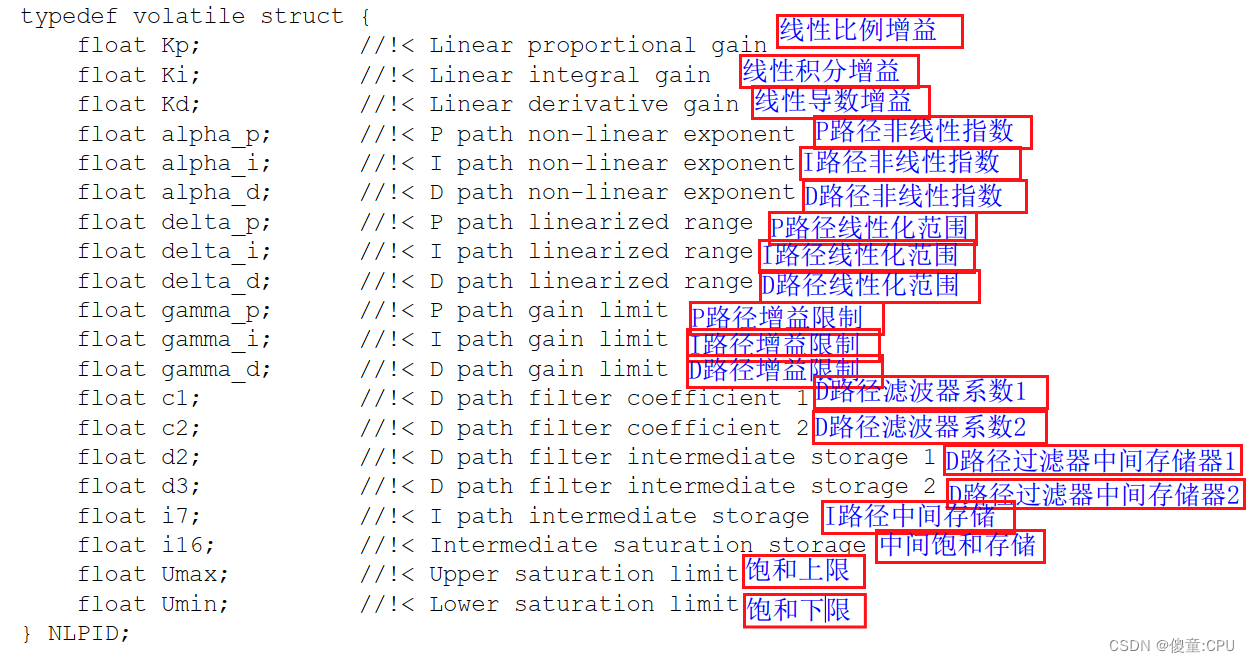
结构元素的存储器地址偏移如所示

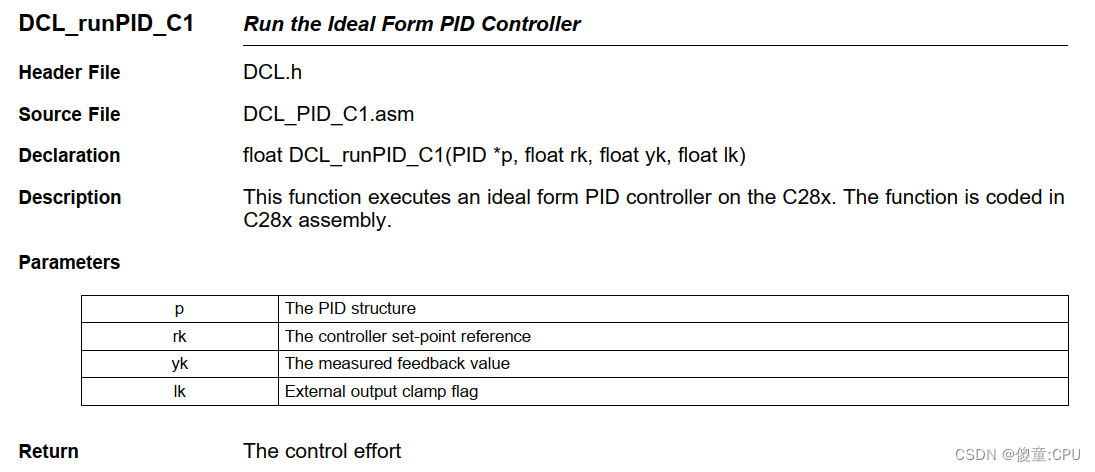
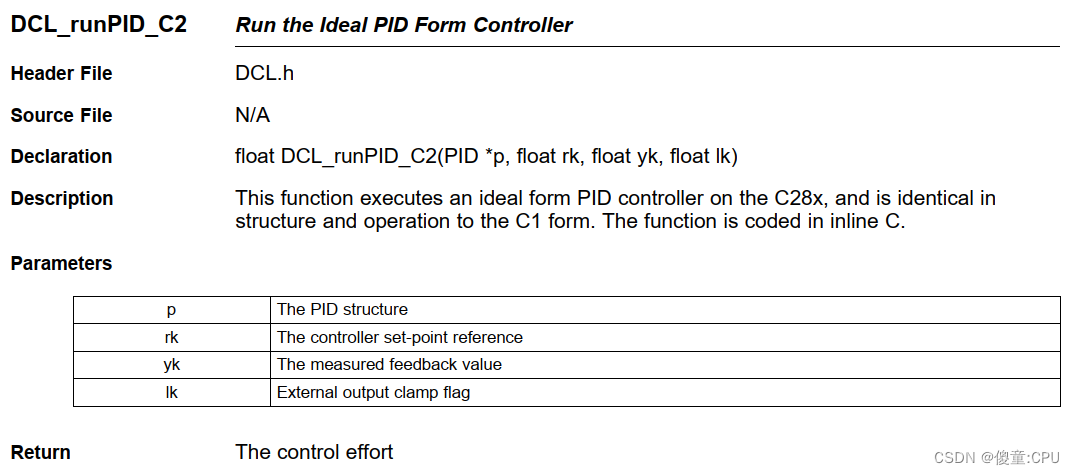
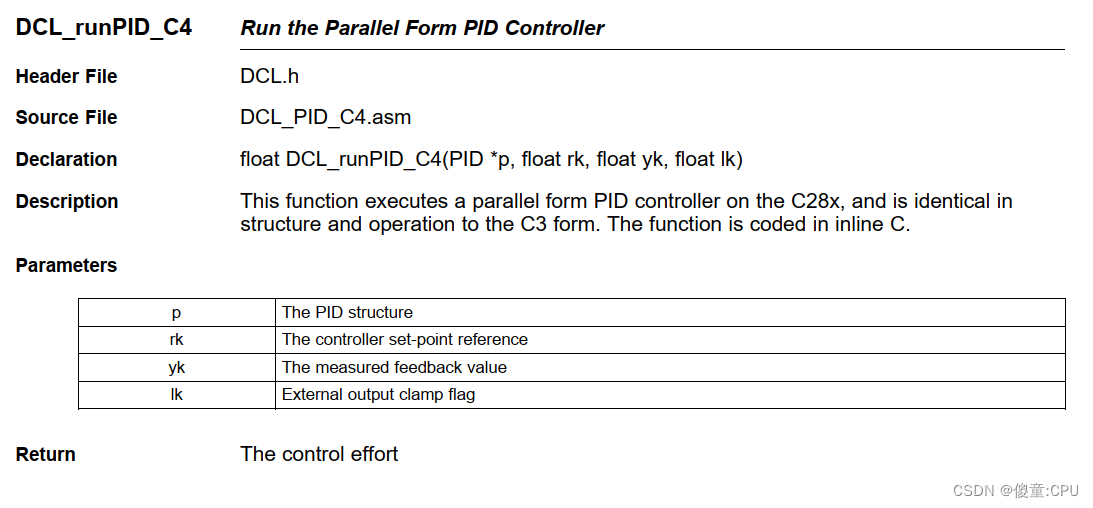
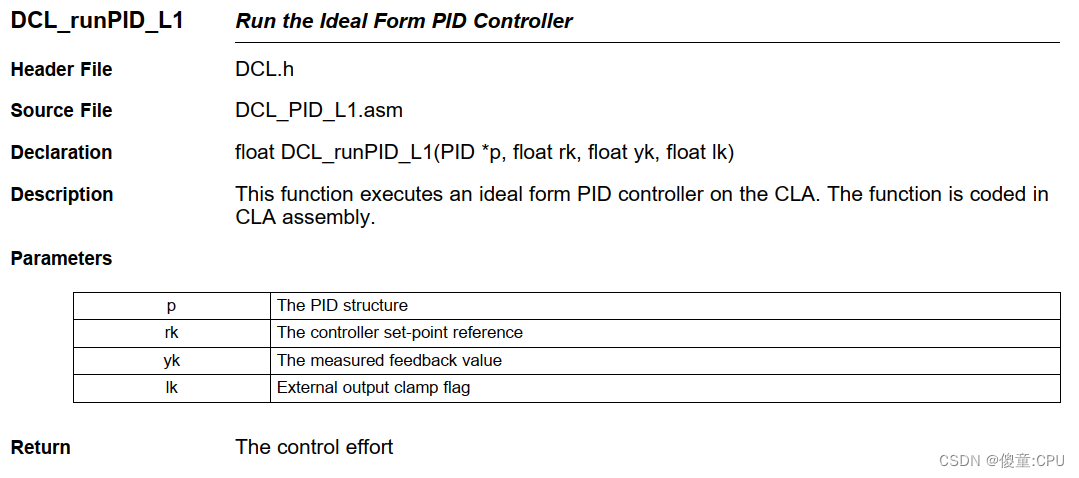
理想形式的 PID 实现如下:
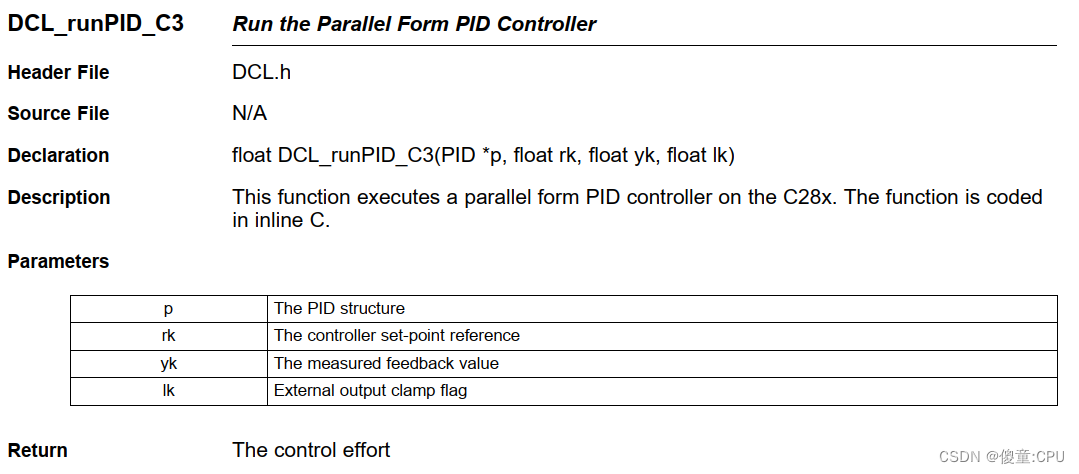
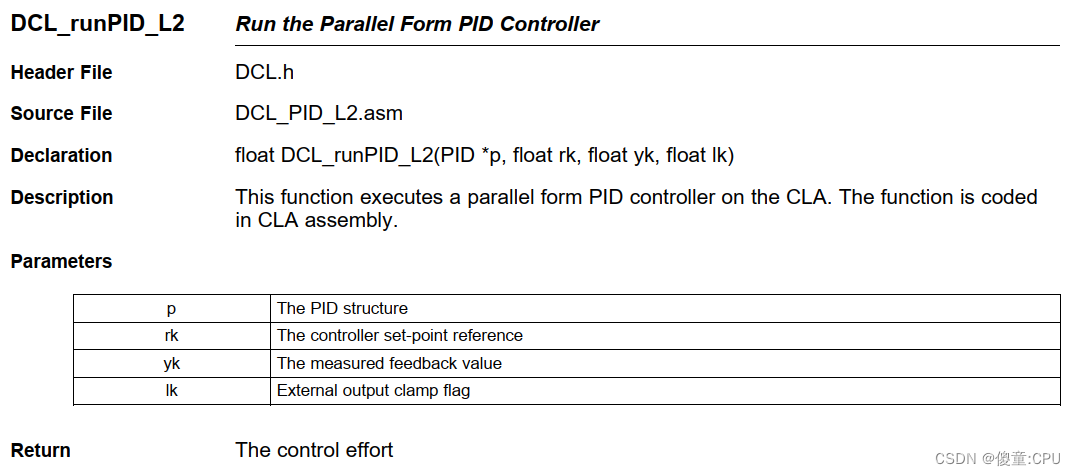
并行形式PID如下:

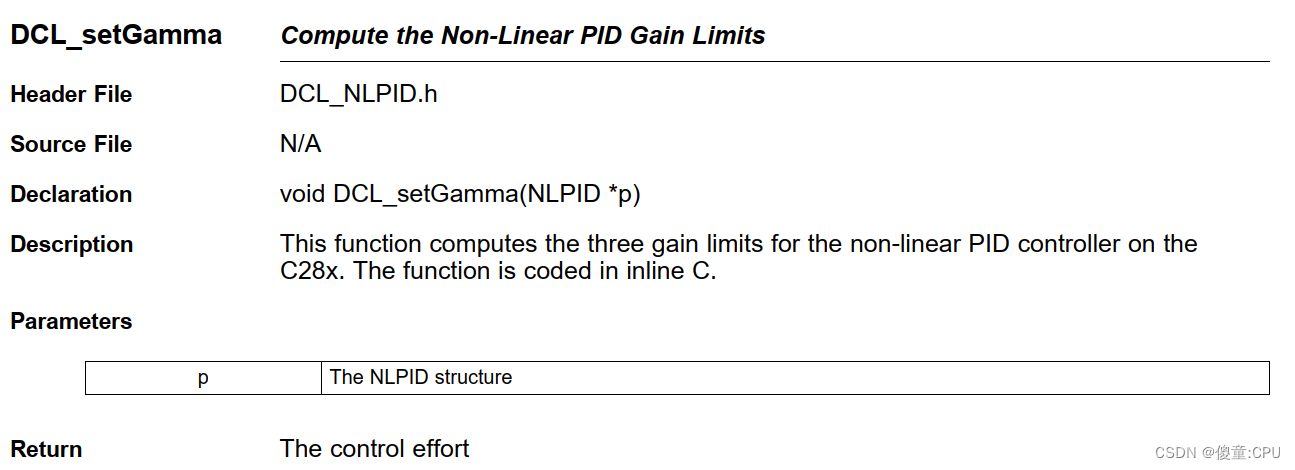
非线性PID控制器
该控制器类似于理想PID的DCL 实现,不同之处在于没有设定点加权,并且微分路径看到的是伺服误差而不是反馈。


实现

文章来源:https://blog.csdn.net/qq_45159887/article/details/135323880
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 第七章 函数(二)
- 快速排序算法
- vs code 设置了自动格式化保存 但是json 配置文件不想自动格式化
- 【谭浩强C程序设计精讲 chap4】选择结构程序设计
- 工厂方法模式
- 保姆级CISP报考攻略,让你不再迷茫
- 14.1 virtual sequence and virtual sequencer
- LeetCode 75| 双指针
- IIOT-IPQ6010 support mesh: Form a more powerful network - faster connections
- 邦芒忠告:职场上不能随便说的10句话