CAN总线网络概述,CANoe名称背后的CAN网络长什么样?
车载网络中CAN总线网络式绕不开的,甚至像是很多的车载网络分析软件都是带有CAN的字样,像是CANoe和CANpro等,那么本文将具体CAN总线。
关注我,共同交流,一起成长
前言
例如:随着人工智能的不断发展,机器学习这门技术也越来越重要,很多人都开启了学习机器学习,本文就介绍了机器学习的基础内容。
一、CAN总线网络
CAN总线网络属于工业现场总线中的一员,CAN的全称是Controller Area Network,即控制器局域网络的意思,事实上从名字能够清楚看到,其主要是用在控制器之间的高速传递用的,最初的CAN总线是由博世为汽车电子电气系统的监测与控制系统设计而研发的,并随着其优良的性能得到了世界范围内的广泛使用,大致可以总结为以下几个阶段:
1983年,诞生于博世,完成了CAN总线协议开发。
1987年,Intel公司完成了第一块控制器芯片设计完成。
1990年,首款应用CAN总线协议的车Mercedes S-Class量产。
1991年,CAN2.0版本发布。
1993年,CAN成功跻身国际标准(分别是高速应用的ISO 11898和低速应用的ISO 11519)
二、CAN总线的特点
CAN总线是一种串行数据通讯协议,其通信接口集成了CAN协议的物理层和数据链路层功能,可以对通信数据完成多项工作。具体CAN总线包括了以下这些特点:
其通信介质没有特别的要求,像是双绞线和光纤等都可以
CAN总线协议主要用于控制器之间的高速通讯,既可以实现一对一的通讯也可以实现一对多的通讯,甚至还可以完成全局广播的效果。
CAN总线协议通讯任何一个节点都可以在任何时刻向网络上其他节点发送信息且不区分主次;当然在总线访问权上有优先级的区分,优先级高的报文获得总线优先访问权,优先级低的会在下一个总线周期自动重发。
其连接节点数量可以达到100多个。
每一帧信息都会进行CRC校验,数据出错率很低;且在节点产生严重错误之时,会自动关闭总线,以切断其与总线的联系避免对其他的节点产生影响。
CAN总线的通讯速度可达1Mb/s,直接通讯最远为10km!
三、CAN总线的主要应用领域
CAN总线技术是为汽车工业而研发的,但是事实上,正是因为CAN总线在性能方面有着高可靠性、实时通讯性以及其较高的性价比,其愈发地在汽车工业以外的产业中得到应用,像是工业机器人、智能家电以及工业控制等方向。
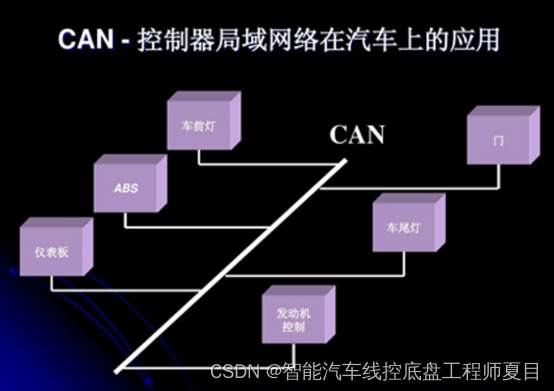
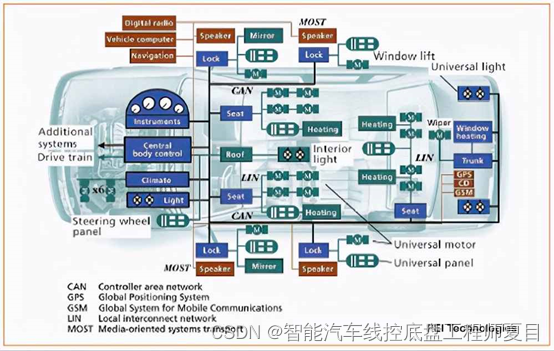
在汽车工业中:事实上,CAN总线技术是为汽车工业量身定做的,会考量汽车的各种的恶劣环境工况,在长期的应用过程中能够发现,CAN总线数据传输稳定可靠,具备着相互之间干扰小且抗干扰能力强的特点,且模块与模块之间只需要有限的一条或者几条信号线,采用中间总线的技术,相对于各两个模块之间需要铺设一条信号线的方式能节省大量的空间与成本。(具体CAN通讯协议怎么使用,在往后的stm32相关文章中利用实例再详加阐述)
关注我,持续了解行业知识;如果本文让你有所收获,期待你的点赞。
如果想要获取相关知识资料,请扫码关注微信公众号:

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 基于ssm的理财通的设计与实现+jsp论文
- Arduino驱动ISD1820音频录放模块(声音传感器)
- Linux常见问题-zip命令打包相同文件但MD5值不一样解决方案
- Python实现离散选择泊松模型(Poisson算法)项目实战
- 音频修复增强软件iZotope RX 10 mac特点介绍
- 广汽本田售后服务技术技能竞赛总决赛
- 没有一家车企能绕开「数据闭环」
- 软件测试/测试开发丨Pytest配置文件pytest.ini
- Netty(NIO基础)
- 【【RTC实时时钟实验 -- 在HDMI上显示-FPGA 小实验】】