python实现平滑线性滤波器——数字图像处理
原理:
平滑线性滤波器是一种在图像处理中广泛使用的工具,主要用于降低图像噪声或模糊细节。这些滤波器的核心原理基于对图像中每个像素及其邻域像素的线性组合。
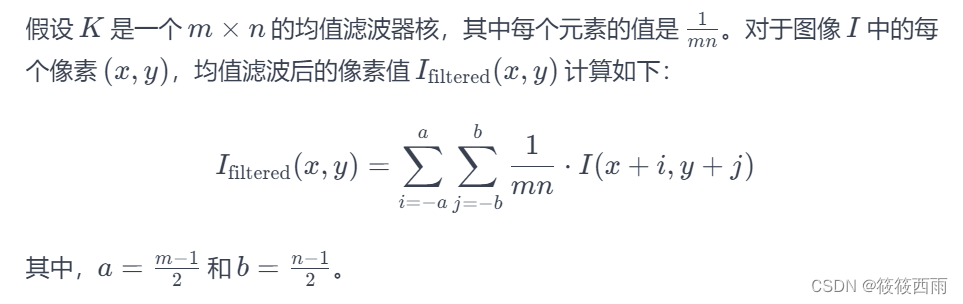
邻域平均:
平滑线性滤波器通过对目标像素及其周围邻域像素的强度值取平均来工作。这个操作使得图像中的每个像素值变得更加接近其邻域的平均值。
滤波器核(Kernel):
滤波器通过一个称为“核”或“掩膜”的小窗口来应用。这个核定义了邻域的大小和形状,通常是一个小的、方形的矩阵。
核中的每个值(权重)决定了相应像素在平均过程中的重要性。
卷积操作:
平滑过程是通过卷积操作实现的,即将核在图像上滑动,并在每个位置上应用加权平均。
对于图像中的每个像素,核覆盖的区域内的像素值与核的相应权重相乘,然后求和得到新的像素值。
常见的平滑线性滤波器
均值滤波器:
最简单的平滑线性滤波器是均值滤波器,它使用的核具有相等的权重,即所有邻域像素的权重相同。
高斯滤波器:
高斯滤波器使用的核基于高斯函数,它为中心像素赋予更高的权重,而远离中心的像素权重较低。
这种类型的滤波器在保留边缘信息的同时,对噪声的平滑效果更好。
应用
平滑线性滤波器主要用于去噪和图像模糊化。在去除噪声时,它们可以帮助减少图像中随机的颜色波动。但是,这种平滑也可能导致图像细节的损失,特别是在边缘区域。因此,选择合适的核大小和类型对于平衡去噪和保持图像细节非常重要。
使用python实现下列过程
提示
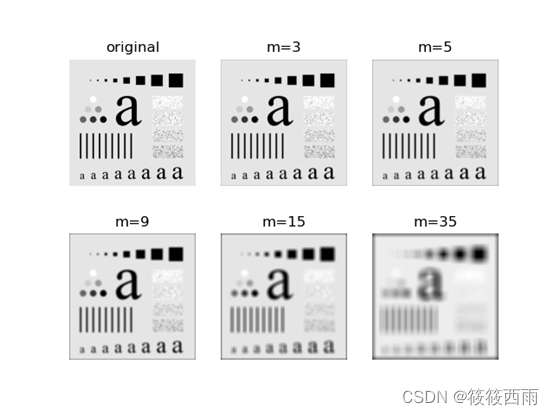
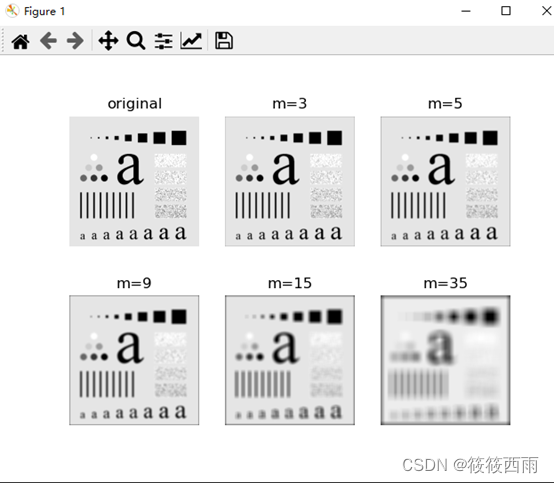
采用的平滑模板大小分别为3,5,9,15,35,大小为3的模板
其余大小模板类似。可以写一个函数实现图像与模板卷积(相关)的过程,步骤包括:根据模板大小为图像填充0边界;双层for循环遍历图像的每个像素点,每次取与模板大小相同的图像块与模板相乘并求和,np.multiply可以实现矩阵逐元素相乘,np.sum实现矩阵求和。
python代码
import cv2
import numpy as np
from matplotlib import pyplot as plt
def correl2d(img, window):
m = window.shape[0]
n = window.shape[1]
# 图像边界填0扩展
img_border = np.zeros((img.shape[0] + m - 1, img.shape[1] + n - 1))
img_border[(m - 1) // 2:img.shape[0] + (m - 1) // 2, (n - 1) // 2:img.shape[1] + (n - 1) // 2] = img
img_result = np.zeros(img.shape)
for i in range(img.shape[0]):
for j in range(img.shape[1]):
temp = img_border[i:i + m, j:j + n]
img_result[i, j] = np.sum(np.multiply(temp, window))
return img_result
img = cv2.imread('Fig0333.tif', 0)
img_list = [img]
img_name_list = ['original']
size = [3, 5, 9, 15, 35]
for m in size:
window = np.ones((m, m)) / (m ** 2)
img_result = correl2d(img, window)
img_list.append(img_result)
img_name_list.append('m=' + str(m))
_, axs = plt.subplots(2, 3)
for i in range(2):
for j in range(3):
axs[i, j].imshow(img_list[i * 3 + j], cmap='gray')
axs[i, j].set_title(img_name_list[i * 3 + j])
axs[i, j].axis('off')
plt.savefig('box_filter.jpg')
plt.show()
结果展示
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Windows和Linux访问不了GitHub的解决方法
- 【PTA-C语言】实验八-函数与指针II
- ctfshow(web171-web189)
- java spring cloud 企业电子招标采购系统源码:营造全面规范安全的电子招投标环境,促进招投标市场健康可持续发展
- 【LeetCode】1. 两数之和(简单)——代码随想录算法训练营Day06
- java8版本国内路径JDK下载链接
- 【C++对于C语言的扩充】C++与C语言的联系,命名空间、C++中的输入输出以及缺省参数
- K8s-安全机制
- git内部原理
- 上海三思立体育苗系统Vertical X打造“不见光”人工农场