自动驾驶中的坐标系
自动驾驶中的坐标系
0.引言
总结于网络。重点在世界坐标系理解。
图自

图自
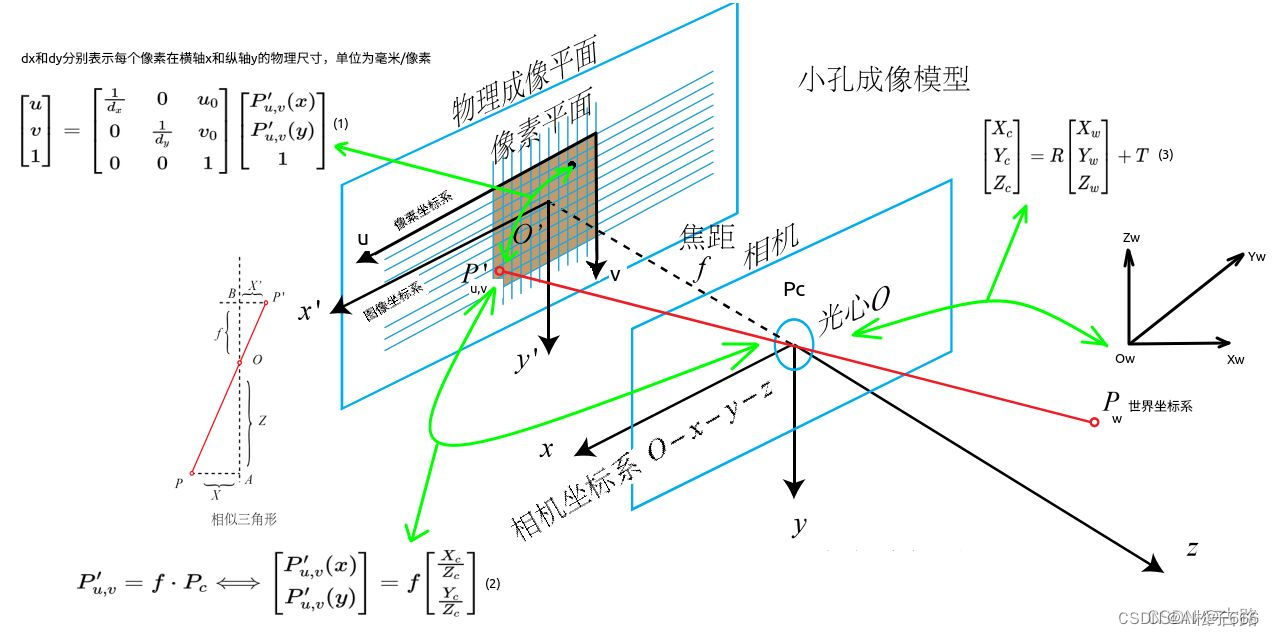
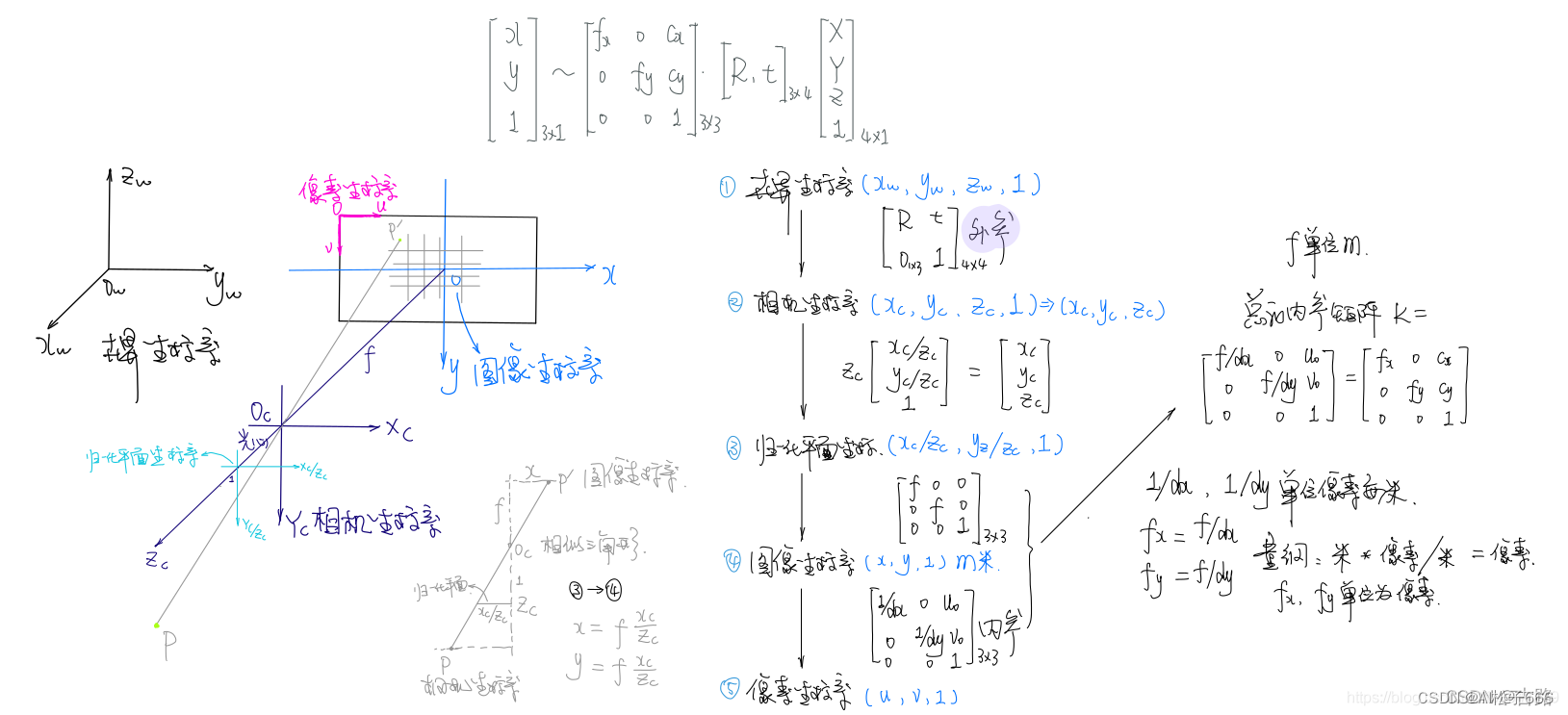
1.相机传感器坐标系
针孔模型:
图自
2.激光雷达坐标系
Velodyne生产的64线激光雷达HDL64:
64线激光雷达进行环境扫描过程:单帧扫描数据

64线激光雷达进行环境扫描过程:全周扫描数据
激光雷达坐标系统
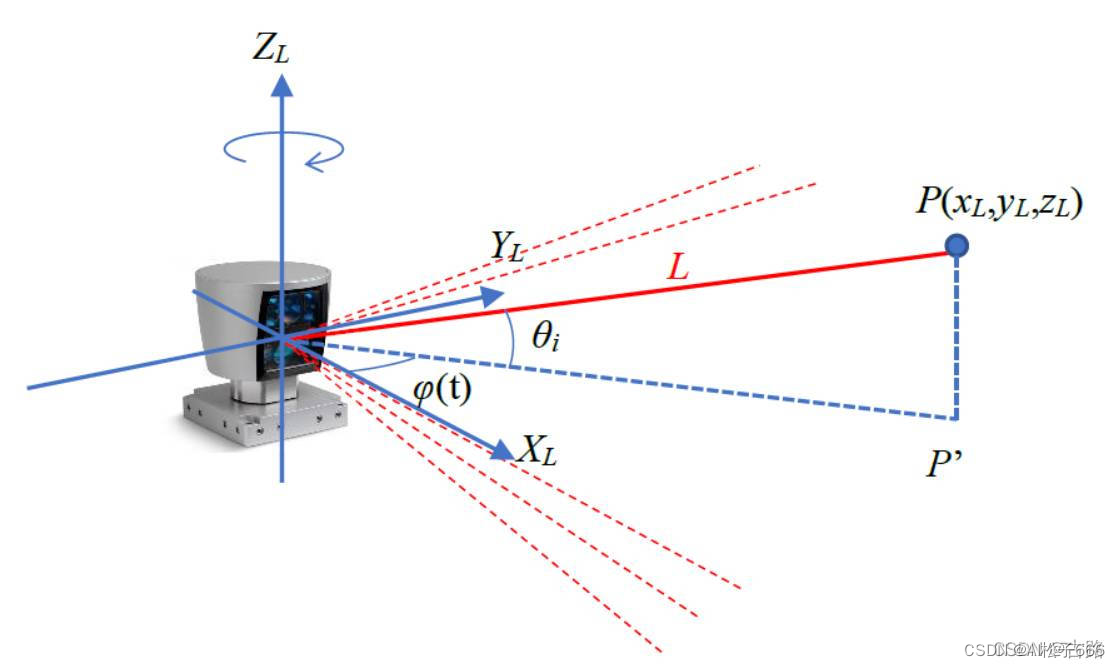
此节来自
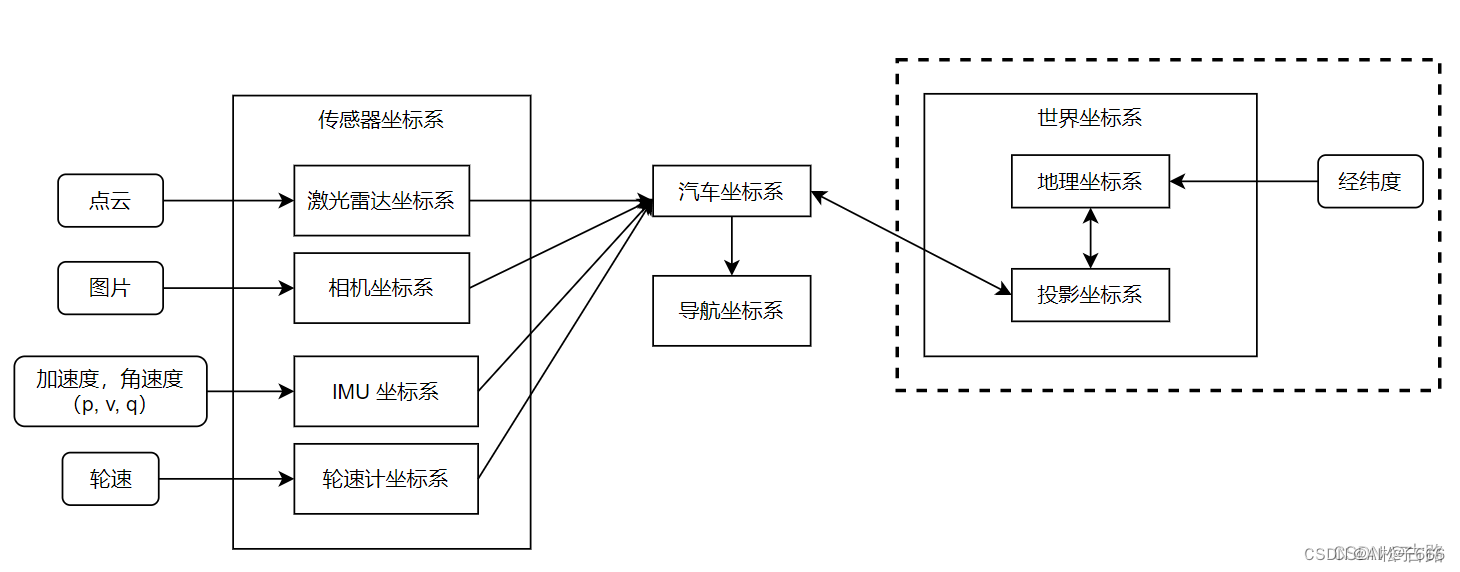
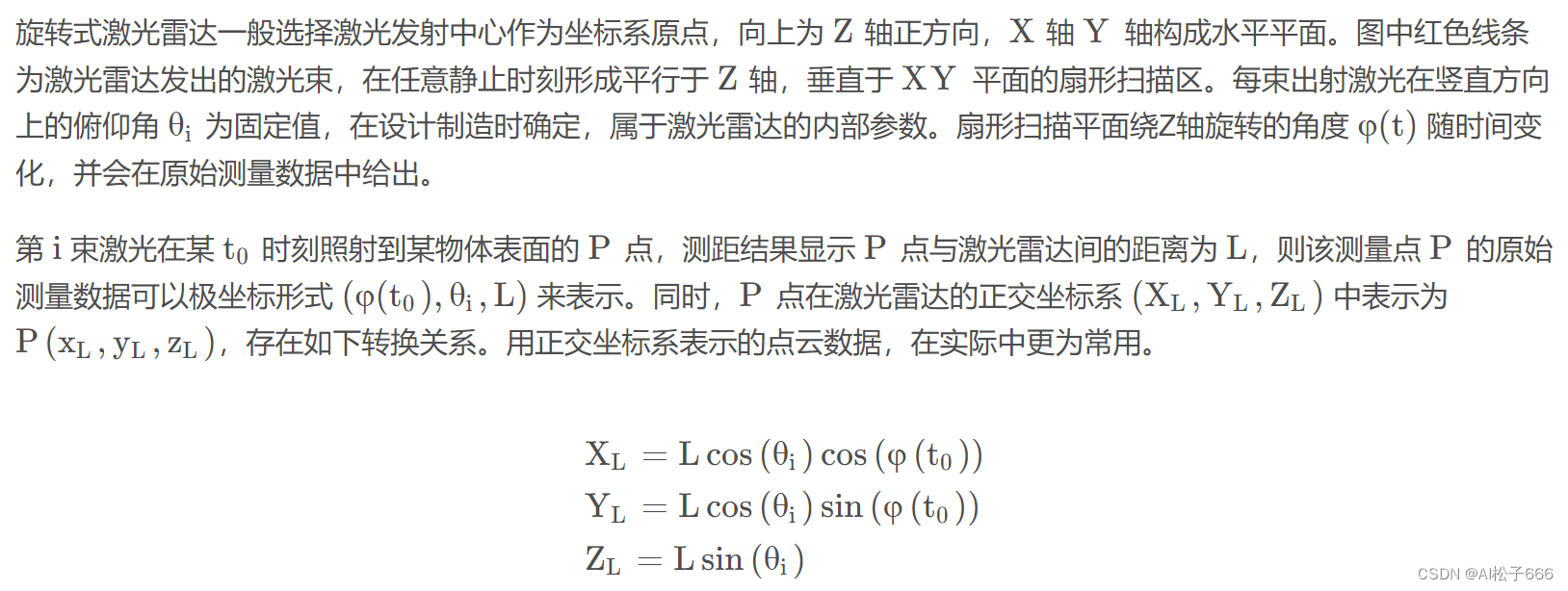
3.车体坐标系
车体坐标系用来描述车辆周围的物体和本车之间的相对位置关系。目前学术界和工业界有几种比较常用的车体坐标系定义方式。分别是ISO国际标准定义,SAE(Society of Automotive Engineers)汽车工程师协会定义,和基于惯性测量单元IMU的坐标定义。

在车辆动力学分析中,ISO定义的车体坐标系较为常见。SAE定义的车体坐标系与航空航天领域常用的机体坐标系相一致。基于IMU定义的车体坐标系,则在IMU的相关应用中较为常见。
此节来自
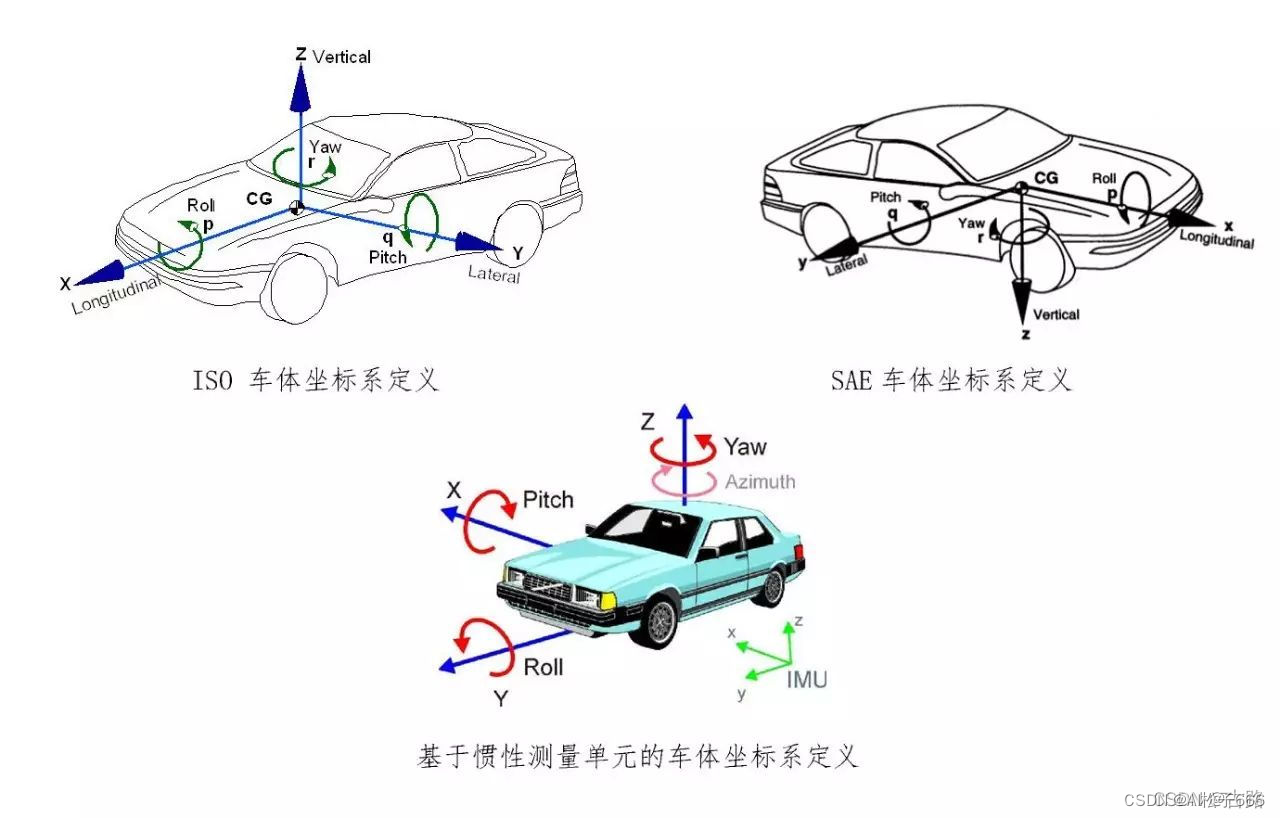
4.世界坐标系
地理坐标系统(英文简写GCS,Geographical Coordinate System)地理坐标系单位 度°分’秒"–>擅长定位
投影坐标系统(英文简写PCS,Projection Coordinate System)投影坐标系单位 米m–>擅长计算
4.1.地理坐标系
图自
某官网
大地坐标系与地理坐标系有何不同?
大地坐标系和地理坐标系都是经纬度表示的坐标系,本身并不包含投影信息,很多时候,这两种说法都是相同的。

蓝色:实际地球
红色:地心坐标系–>全球拟合表达
绿色:参心坐标系–>局部拟合表达(对于局部精度更高!)
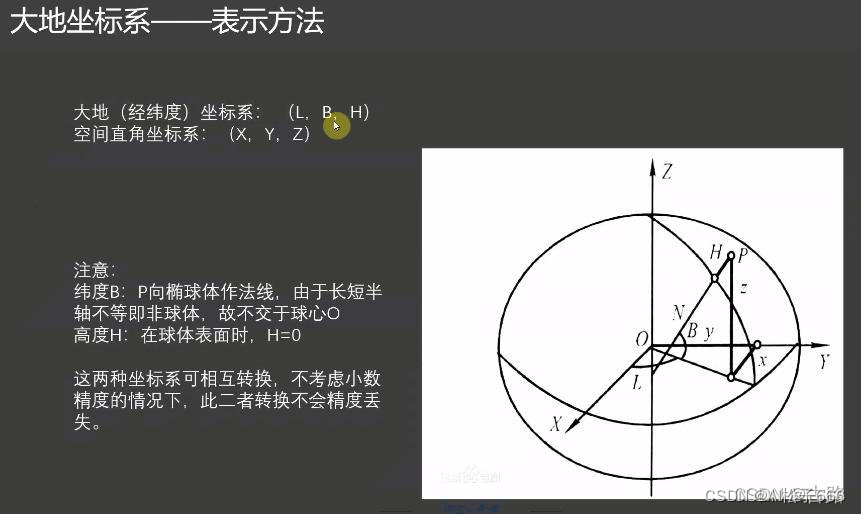
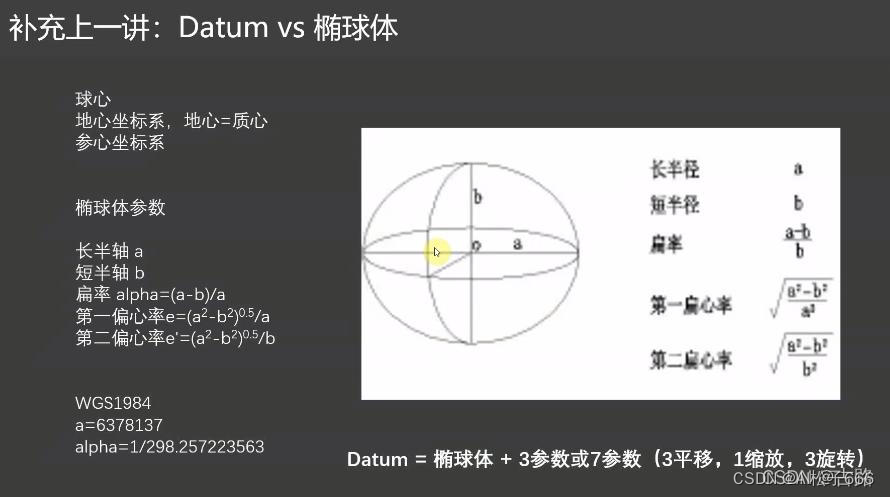
大地坐标系(经纬度)
L:longitude -->经度
B:latitude -->纬度
H: altitude -->海拔height above sea level
0度经线:国际上将通过英国伦敦格林尼治天文台原址的那条经线称为0°经线,也叫本初子午线:分别向东向西从 0°到 180°
0度纬线:赤道,越往两极纬度越高。纬线在南北极缩成一个点,叫极点,也分别是90°纬线。
表述:东经、西经、南纬、北纬–>"E"东经、"W"西经、"N"北纬、"S"南纬–>平时一般使用东经和北纬(也即是以东经北纬方向为正)
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 机器学习(一)Spark机器学习基础
- 【Docker】Linux中使用Docker安装Nginx部署前后端分离项目应用
- openmediavault(OMV) (19)云相册(3)mt-photos
- 1.5 FMEA项目规划:5T
- Spring中,在singleton+setting模式下,为什么循环依赖不会出现问题,Spring是如何应对的。
- ELK之LogStash接收Filebeat的数据
- GPT/GPT4科研应用与AI绘图技术及论文高效写作(建议收藏)
- 三分钟手把手教你安装fl studio 21.2.2.3914破解版2024年最新图文激活教程
- Spring中的工厂类
- 测量USB接口信号眼图质量