stm32---输入捕获实验实操(巨详细)
这次来分享上次没说完的输入捕获的知识点
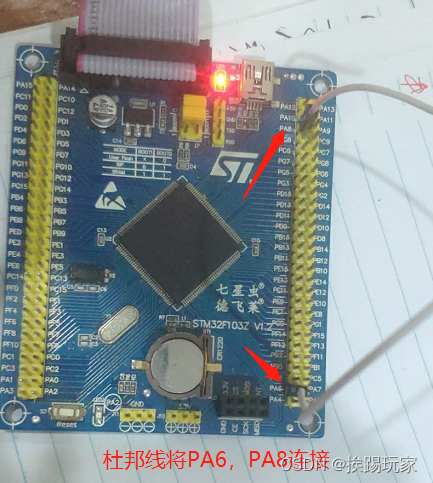
实验中用到两个引脚,一个是通用定时器?TIM3?的通道?1,即?PA6,用于输出?PWM?信号,另一
个是高级控制定时器?TIM1?的通道?1,即?PA8,用于?PWM?输入捕获,实验中直接用一根杜邦线
短接即可?PA6?和?PA8?即可,同时可用示波器监控?PA6?的波形,看看实验捕获的数据是否正确。
PA6:用定时器的输出比较功能输出波形。
PA8:用定时器的输入捕获功能捕获波形。
步骤
1.通用定时器产生?PWM?配置
2.高级定时器?PWM?输入配置
3.编写中断服务程序,计算测量的频率和占空比,并仿真调试看是否一致。
编程的要点主要分成两部分,一个是通用定时器的?PWM?信号输出,另一个是?PWM?信号输入捕
获。
下面就贴出代码,全文跟着我操作,可以和我实现一样的效果
1.定时器产生?PWM?配置(输出比较)
1.1 配置GPIO
由于我们用到的是PA6,那么就配置PA6复用推挽输出就行,因为他用的不是普通GPIO口的功能,而是TIM3_CH1所以要用到复用功能,同时开启复用的时钟。

1.2 初始化定时器


1.3 初始化输出比较

最后在最上面加上,使能一下TIM3的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);这样就可以产生50%占空比的波形了,周期频率那些由Psc, arr来决定
那么现在我们用示波器量一下看看到底是不是50%的占空比

实际测量,的确是的。那么下面就开始写输入捕获的代码
2.定时器?PWM?输入配置
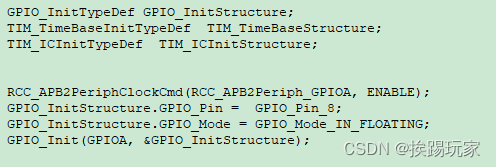
1.1 配置GPIO
由于我们用到的是PA8,那么就配置PA8,但是这次要配置成浮空输入模式
1.2配置中断(因为我们要用到捕获和溢出处理中断)
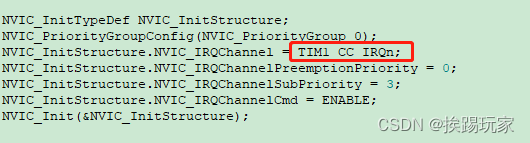
中断通道别选错
1.3 初始化定时器

我们可以算出计数器的计数周期为?T=72M/72=1uS,1us*1000=1MS,这个是定时
器在不溢出的情况下的最大计数周期,也就是说周期小于?1ms?的?PWM?信号都可以被捕获到,转
换成频率就是能捕获到的最小的频率为?1KHZ。
1.4 初始化输入捕获功能

因为是?PWM?输入模式,只能使用通道?1?和通道?2?,假如我们使用的是通道?1,即?TI1,输入
的?PWM?信号会被分成两路,分别是?TI1FP1?和?TI1FP2,两路都可以是触发信号。如果选择
TI1FP1?为触发信号,那么?IC1?捕获到的是?PWM?信号的周期,IC2?捕获到的是占空比,这种
输入通道?TI?和捕获通道?IC?的映射关系叫直连,输入捕获结构体的?TIM_ICSelection?要配置为
TIM_ICSelection_DirectTI。如果选择?TI1FP2?为触发信号,则?IC2?捕获到的是周期,IC1?捕获到的是占空比,这种输入通道?TI?和捕获通道?IC?的映射关系叫非直连,输入捕获结构体的?TIM_ICSelection要配置为?TIM_ICSelection_IndirectTI。有关输入通道?TI?和捕获通道?IC?的具体映射关系见图输入通道?TI?和捕获通道?IC?的映射图?,有直连和非直连两种。

好,我们来分析上上面的一大堆术语。
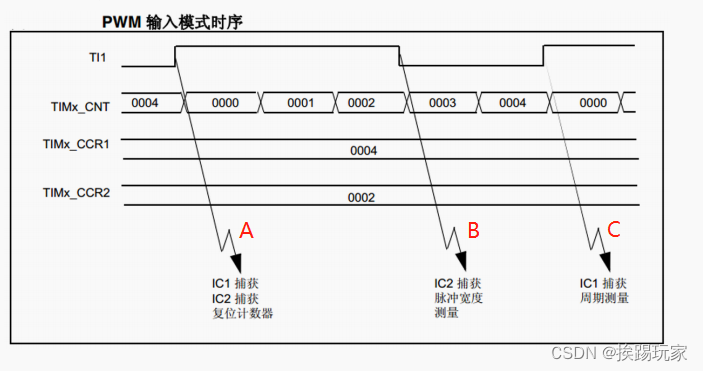
Q:如果选择TI1FP1?为触发信号,那么?IC1?捕获到的是?PWM?信号的周期,IC2?捕获到的是占空比。这句话怎么理解呢?
A点:由于上面的输入捕获的配置。当捕获到?PWM?信号的第一个上升沿时,产生中断,计数器被复位,锁存到捕获寄存器?IC1?和?IC2的值都为?0。
B点:当下降沿到来时,IC2?会捕获,对应的是占空比,但是会产生中断。
C点:当捕获到第二个上升沿时,IC1?会捕获,对应的是周期,而且会再次进入中断,这个时间就可以根据?IC1?和?IC2的值计算出频率和占空比。
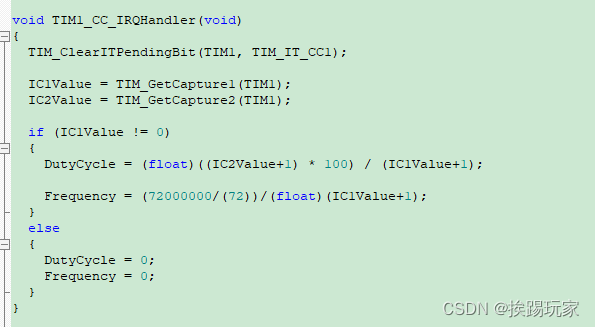
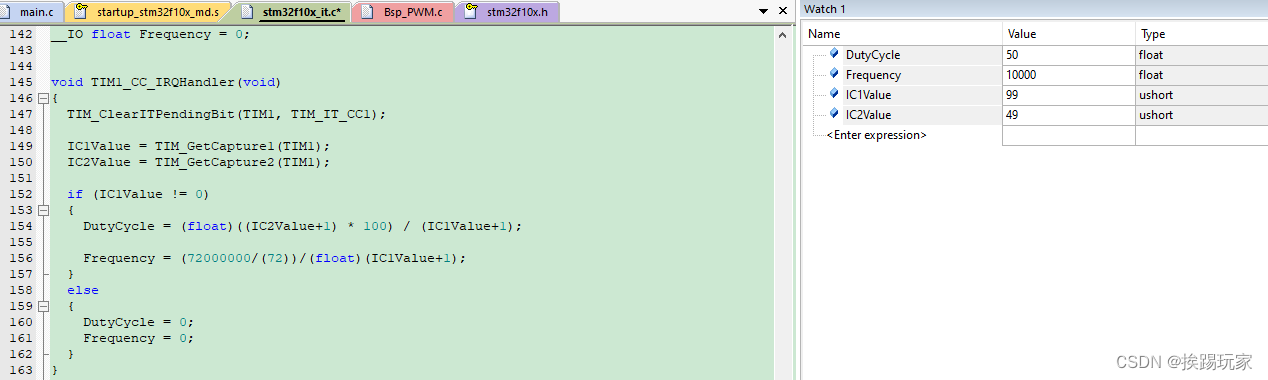
中断复位函数中,我们获取输入捕获寄存器?CCR1?和?CCR2?寄存器中的值,当?CCR1?的值不为?0
时,说明有效捕获到了一个周期,然后计算出频率和占空比。在计算的时候?CCR1?和?CCR2?的值
都必须要加?1,因为计数器是从?0?开始计数的。
现在我们全速跑代码看看是否一致,还是很准的
全文就是这样,非常的简单易懂
以上仅是个人学习笔记,若对你有帮助,那么最好不过,共勉!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Spark大数据分析与实战笔记(第二章 Spark基础-04)
- 2024最新发布:GitHub Copilot快速激活指南!无需账号/认证,30秒完成激活 | 1分钟简易教程,立刻启用,成功率达100%!
- 交叉熵损失函数
- 打造完美人像,PixCake像素蛋糕助您一键修图
- 驾驶未来:百度Apollo自动驾驶技术的探索与实践(文末赠送apollo周边)
- 05.CSS前言
- 学习笔记-李沐动手学深度学习(一)(01-07)
- QT的坐标系统,回收机制、菜单栏,工具栏,状态栏,对话框及资源文件
- 护眼台灯哪个牌子好?书客、明基、飞利浦横向对比测评
- MongoDB聚合操作