北京交通大学高性能作业——CPU SIMD + GPU SIMD
高性能 CPU SIMD + GPU SIMD
1. CPU SIMD
Intel SIMD
运行代码和截图
#include <stdio.h>
#include <xmmintrin.h> // Need this for SSE compiler intrinsics
#include <math.h> // Needed for sqrt in CPU-only version
#include <time.h>
int main(int argc, char* argv[])
{
printf("Starting calculation...\n");
const int length = 64000;
// We will be calculating Y = SQRT(x) / x, for x = 1->64000
// If you do not properly align your data for SSE instructions, you may take a huge performance hit.
float *pResult = (float*) _aligned_malloc(length * sizeof(float), 16); // align to 16-byte for SSE
__m128 x;
__m128 xDelta = _mm_set1_ps(4.0f); // Set the xDelta to (4,4,4,4)
__m128 *pResultSSE = (__m128*) pResult;
const int SSELength = length / 4;
clock_t clock1=clock();
#define TIME_SSE // Define this if you want to run with SSE
#ifdef TIME_SSE
// lots of stress loops so we can easily use a stopwatch
for (int stress = 0; stress < 1000; stress++)
{
// Set the initial values of x to (4,3,2,1)
x = _mm_set_ps(4.0f, 3.0f, 2.0f, 1.0f);
for (int i=0; i < SSELength; i++)
{
__m128 xSqrt = _mm_sqrt_ps(x);
// Note! Division is slow. It's actually faster to take the reciprocal of a number and multiply
// Also note that Division is more accurate than taking the reciprocal and multiplying
#define USE_DIVISION_METHOD
#ifdef USE_FAST_METHOD
__m128 xRecip = _mm_rcp_ps(x);
pResultSSE[i] = _mm_mul_ps(xRecip, xSqrt);
#endif //USE_FAST_METHOD
#ifdef USE_DIVISION_METHOD
pResultSSE[i] = _mm_div_ps(xSqrt, x);
#endif // USE_DIVISION_METHOD
// Advance x to the next set of numbers
x = _mm_add_ps(x, xDelta);
}
}
clock_t clock2=clock();
printf("SIMDtime:%d ms\n",1000*(clock2-clock1)/CLOCKS_PER_SEC);
#endif // TIME_SSE
#define TIME_NoSSE
#ifdef TIME_NoSSE
clock_t clock3=clock();
// lots of stress loops so we can easily use a stopwatch
for (int stress = 0; stress < 1000; stress++)
{
clock_t clock3=clock();
float xFloat = 1.0f;
for (int i=0 ; i < length; i++)
{
// Even though division is slow, there are no intrinsic functions like there are in SSE
pResult[i] = sqrt(xFloat) / xFloat;
xFloat += 1.0f;
}
}
clock_t clock4=clock();
printf("noSIMDtime:%d ms\n",1000*(clock4-clock3)/CLOCKS_PER_SEC);
#endif // TIME_noSSE
return 0;
}

图1-1 PC上的CPU SIMD性能比较
结果分析
这段程序比较了SIMD使用SSE指令集和不使用SIMD两种方式的计算速度差距,程序计算的是√x/x,发现SIMD使用SSE指令集可以并行四个浮点数进行计算,结果确实会比不使用SIMD更快。
Kunpeng SIMD (ARM NENO)
运行代码与截图
#include <stdio.h>
#include "arm_neon.h"
void add3 (uint8x16_t *data){
uint8x16_t three = vmovq_n_u8(3.0);
*data = vaddq_u8(*data, three);
}
void print_uint8(uint8x16_t data, char* name){
int i;
static uint8_t p[16];
vst1q_u8(p,data);
printf("%s = ",name);
for (i =0 ; i<16; i++){
printf("%02d",p[i]);
}
printf("\n");
}
int main(){
const uint8_t uint8_data[] ={1.0,2.0,3.0,4.0,5.0,6.0,7.0,8.0,9.0,10.0,11.0,12.0,13.0,14.0,15.0,16.0};
uint8x16_t data;
data = vld1q_u8(uint8_data);
print_uint8(data, "data");
add3(&data);
print_uint8(data,"data (new)");
return 0;
}

图1-2 TaiShan服务器运行ARM NENO文件
结果分析
程序使用了ARM NEON指令集提供的函数实现了对16个uint8_t类型的数据进行并行计算。add3函数是使16个unit8_t元素的向量每个元素加3。其中vmovq_n_u8函数创建了一个有16个uint8_t 类型元素的向量three,每个元素值都是3。vaddq_u8函数将three和data中每个对应元素相加,将结果写回data。print_uint8函数,用于打印uint8x16_t类型的向量,方法是先把向量元素的值存储到数组再打印。主函数中定义了一个uint8_data数组,包含了16个 uint8_t类型的数据再转化为16个元素的向量data。print_uint8函数打印出data最初的值,再调用add3函数操作data,最后调用print_uint8函数打印出计算后的值。
2.GPU SIMD
CUDA installation information
通过win + r输入cmd打开命令行,用nvcc -V查看cuda的安装信息,我安装的版本是11.6
图2-1-1 CUDA installation information
deviceQuery in CUDA
进入我安装CUDA的位置,并运行deviceQuery,可以看到给出了详细的设备信息,里面有我的显卡型号和最大的计算能力,以及运行内存和主频等。
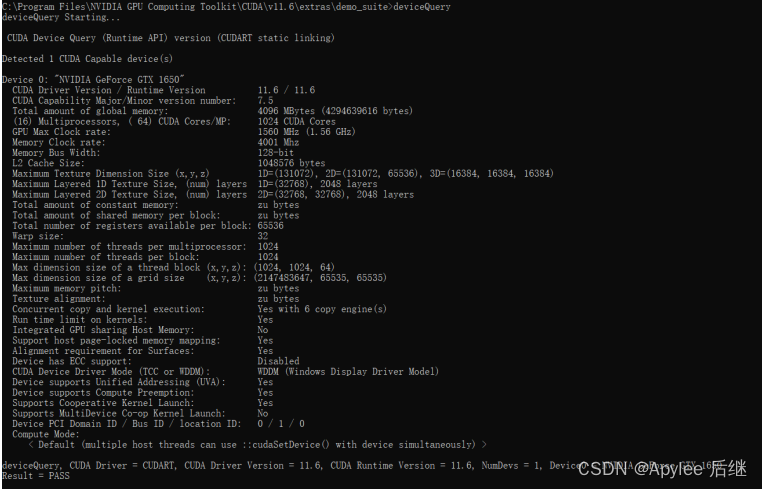
图2-2-1deviceQuery in CUDA
Vector calculation in CUDA
运行代码及截图
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include <cuda.h>
// Kernel that executes on the CUDA device
__global__ void square_array(float* a, int N)
{
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < N) a[idx] = a[idx] * a[idx];
}
int main()
{
float* a_h, * a_d; // Pointer to host & device arrays
const int N = 10; // Number of elements in arrays
size_t size = N * sizeof(float);
a_h = (float*)malloc(size); // Allocate array on host
cudaMalloc((void**)&a_d, size); // Allocate array on device
// Initialize host array and copy it to CUDA device
for (int i = 0; i < N; i++) a_h[i] = (float)i;
cudaMemcpy(a_d, a_h, size, cudaMemcpyHostToDevice);
// Do calculation on device:
int block_size = 32;
int n_blocks = N / block_size + (N % block_size == 0 ? 0 : 1);
square_array << < n_blocks, block_size >> > (a_d, N);
// Retrieve result from device and store it in host array
cudaMemcpy(a_h, a_d, sizeof(float) * N, cudaMemcpyDeviceToHost);
// Print results
for (int i = 0; i < N; i++) printf("%d %f\n", i, a_h[i]);
// Cleanup
free(a_h); cudaFree(a_d);
return 0;
}

图2-3-1 Vector calculation in CUDA
结果分析
程序创建了一个包含10个元素的浮点数数组。把数组从主机内存复制到显卡的内存中。计算了该数组每个元素的平方,并将结果存到显卡的内存中。最后,它从显卡内存中将计算结果复制回主机内存,打印出内阁元素的索引以及对应的平方值。计算过程采用了并行计算,这里设置了每个线程块包含32个线程,每个线程计算一个数组元素的平方。由于数组大小为10,因此只需要启动1个线程块
PI calculation in CUDA
运行代码及截图
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include <cuda.h>
#include <math.h>
#include <tchar.h>
#include <time.h>
#define NUM_THREAD 1024
#define NUM_BLOCK 1
__global__ void cal_pi(double* sum, long long nbin, float step, long long nthreads, long long nblocks) {
long long i;
float x;
long long idx = blockIdx.x * blockDim.x + threadIdx.x;
for (i = idx; i < nbin; i += nthreads * nblocks) {
x = (i + 0.5) * step;
sum[idx] = sum[idx] + 4.0 / (1. + x * x);
}
}
int _tmain(int argc, _TCHAR* argv[])
{
long long tid;
double pi = 0;
long long num_steps = 100000000;
float step = 1. / (float)num_steps;
long long size = NUM_THREAD * NUM_BLOCK * sizeof(double);
clock_t before, after;
double* sumHost, * sumDev;
sumHost = (double*)malloc(size);
cudaMalloc((void**)&sumDev, size);
// Initialize array in device to 0
cudaMemset(sumDev, 0, size);
before = clock();
// Do calculation on device
printf("Before Compute \n\n");
dim3 numBlocks(NUM_BLOCK, 1, 1);
dim3 threadsPerBlock(NUM_THREAD, 1, 1);
cal_pi << <numBlocks, threadsPerBlock >> > (sumDev, (int)num_steps, step, NUM_THREAD, NUM_BLOCK); // call CUDA kernel
printf("After Compute \n\n");
// Retrieve result from device and store it in host array
cudaMemcpy(sumHost, sumDev, size, cudaMemcpyDeviceToHost);
printf("After Copy \n\n");
for (tid = 0; tid < NUM_THREAD * NUM_BLOCK; tid++) {
pi = pi + sumHost[tid];
}
pi = pi * step;
after = clock();
printf("The value of PI is %15.12f\n", pi);
printf("The time to calculate PI was %f seconds\n", ((float)(after - before) / 1000.0));
free(sumHost);
cudaFree(sumDev);
return 0;
}

图2-4-1 只调用1个线程块算出pi所花费的时间
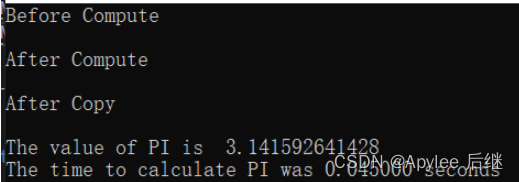
图2-4-2 根据显卡的线程块上限调整代码后,速度快了十倍之多
结果分析
使用CUDA计算圆周率的程序。程序中sumHost和sumDev两个数组分别在主机和显卡内存中存储计算结果,cudaMalloc函数和cudaMemset函数在显卡开辟空间以及清零,然后执行cal_pi函数对圆周率进行计算。计算是在显卡上并行地运行的,它会根据输入的参数计算圆周率,并将结果存储在传入的sum数组中。每个线程计算一部分区域的和,即计算左端点为 (i+0.5)*step,右端点为 (i+1.5)*step 的小矩形面积,并加到sum[idx]中,最后程序输出圆周率的值以及所花费的时间。计算前用numBlocks和threadPerBlock来分别指定线程块数量和线程数。用<<<numBlocks,threadsPerBlock>>>来指定使用多少个线程块和每个线程块中包含多少个线程。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 19.云原生CICD之ArgoCD入门
- 【Sharding-Sphere 整合SpringBoot】
- 【深度学习:Recurrent Neural Networks】循环神经网络(RNN)的简要概述
- 音频筑基:时延、帧长选取的考量
- 【Unity】Timer计时器属性及使用
- 宋仕强论道之华强北目前的困境(二十六)
- MT1168总结
- IP地址与MAC地址的区别与联系
- Linux - 内存 - memblock 分配器
- 阿里云服务器怎么样?阿里云服务器优势、价格及常见问题