3D视觉-ToF测量法(Time of Flight)
发布时间:2023年12月31日
概念
ToF
是
Time of Flight
的缩写,
ToF
测量法又被称作飞光时间测量法,是通过给目标连续发射激光脉冲,然后用传感器接收在被测平面上反射回来的光脉冲,通过计算光脉冲的飞行往返时间来计算得到确切的目标物距离。因为返回时间很短,通过直接法测光飞行时间不可行,一般会使用经过调制后的光波计算其相位偏移来实现。
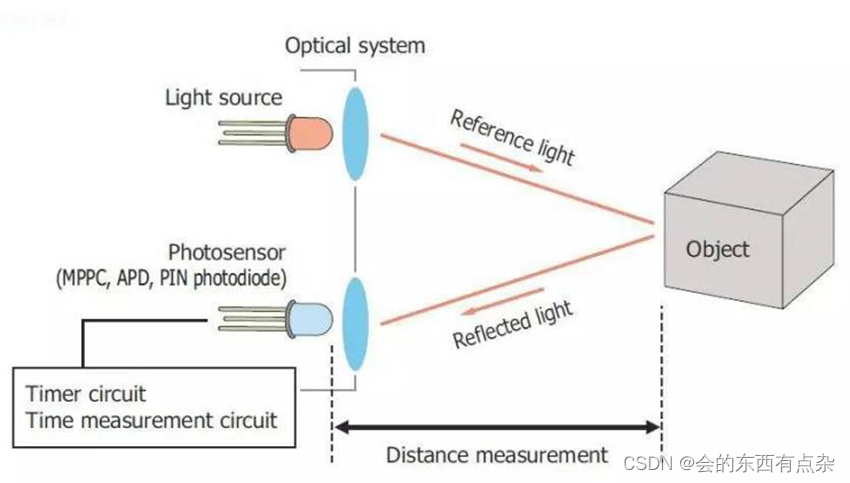
ToF-单点测距原理?
它由一个发射二极管、接收二极管、调制模块,解调模块、处理器几部分组成。调制模块负责调制发射的红外调制波,通过发射二极管将信号发射出去。解调模块负责对接受二极管接收到的反射红外波解调。处理器中包含
ADC
和数据处理,
ADC
是为了将模拟信号转化为数字信号。数据处理时将测得的相位差换算成深度信息。
ToF
-
单点测距原理
?
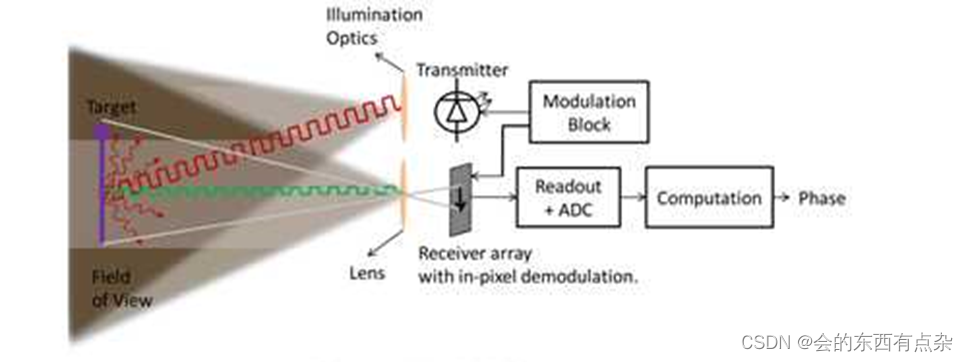
ToF-多点测距原理?
它和传统
RGB
摄像头的组成结构基本相似。它与点单的
ToF
系统比较区别在于,测量范围不是一个点,它是一个面,因此,接收模块变成了点阵的光敏传感器,通常使用的是
CMOS
传感器。在传感器前面、和发射二极管前面多了光学镜片,一个是为了红外波的辐射范围、一个是为了滤除
850nm
以外的光线,就是说,要保证进入传感器的光线只是
850nm
的,这样才能保证测量的准确度。
文章来源:https://blog.csdn.net/qq_20660115/article/details/135313567
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- hab_virtio hypervisor 虚拟化
- 流星全自动网页生成系统重构版源码
- 学习使用JavaScript判断奇偶数的2种方法代码举例
- 别再混淆了!model.eval()和torch.no_grad()的区别一次讲清楚
- 利用Python实现科学式占卜
- git命令看这一篇就够了(收藏,即用即查)
- 【MySQL故障】主从延迟越来越大
- 【VSCode,Python】一劳永逸的成功导入本地模组,PYTHONPATH的修改,与各种踩坑点
- Java设计模式-适配器模式(8)
- WiFi7: EMLSR 操作之三 – 运行时