ROS学习记录:在ROS中用C++实现激光雷达避障
发布时间:2024年01月04日
前言
本文建立在成功获取激光雷达数据的基础上,详细参考
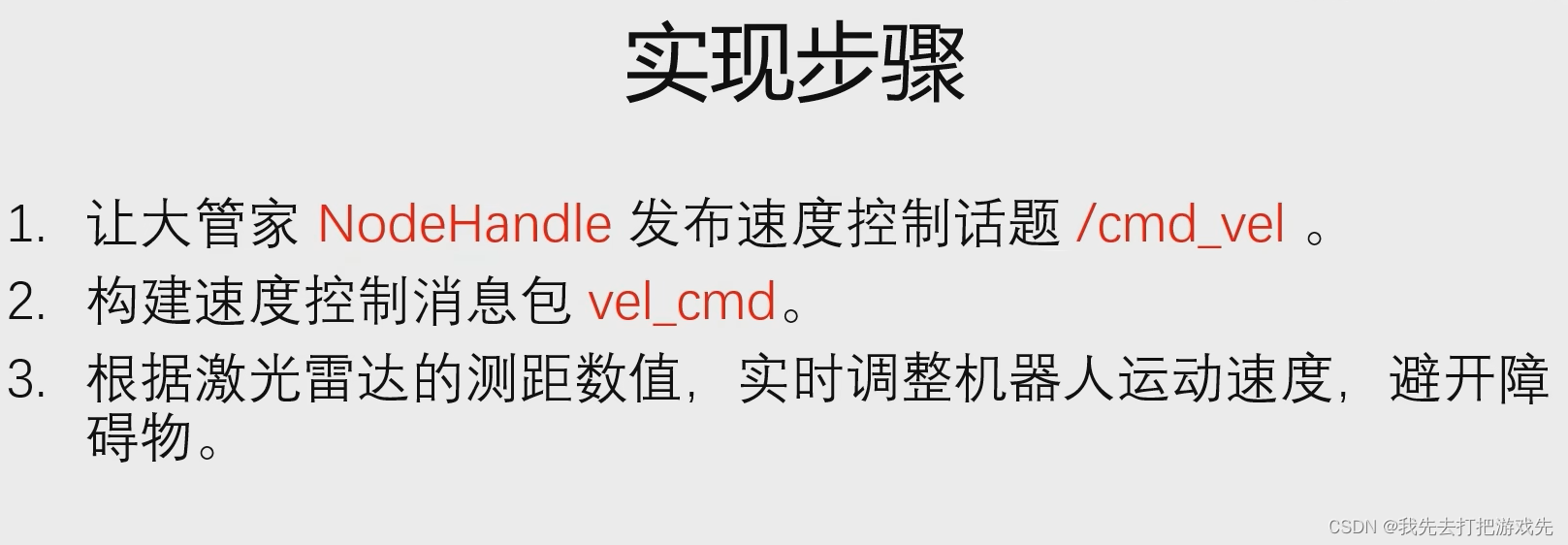
一、实现思路
二、在VScode中打开之前编写好的lidar_node.cpp
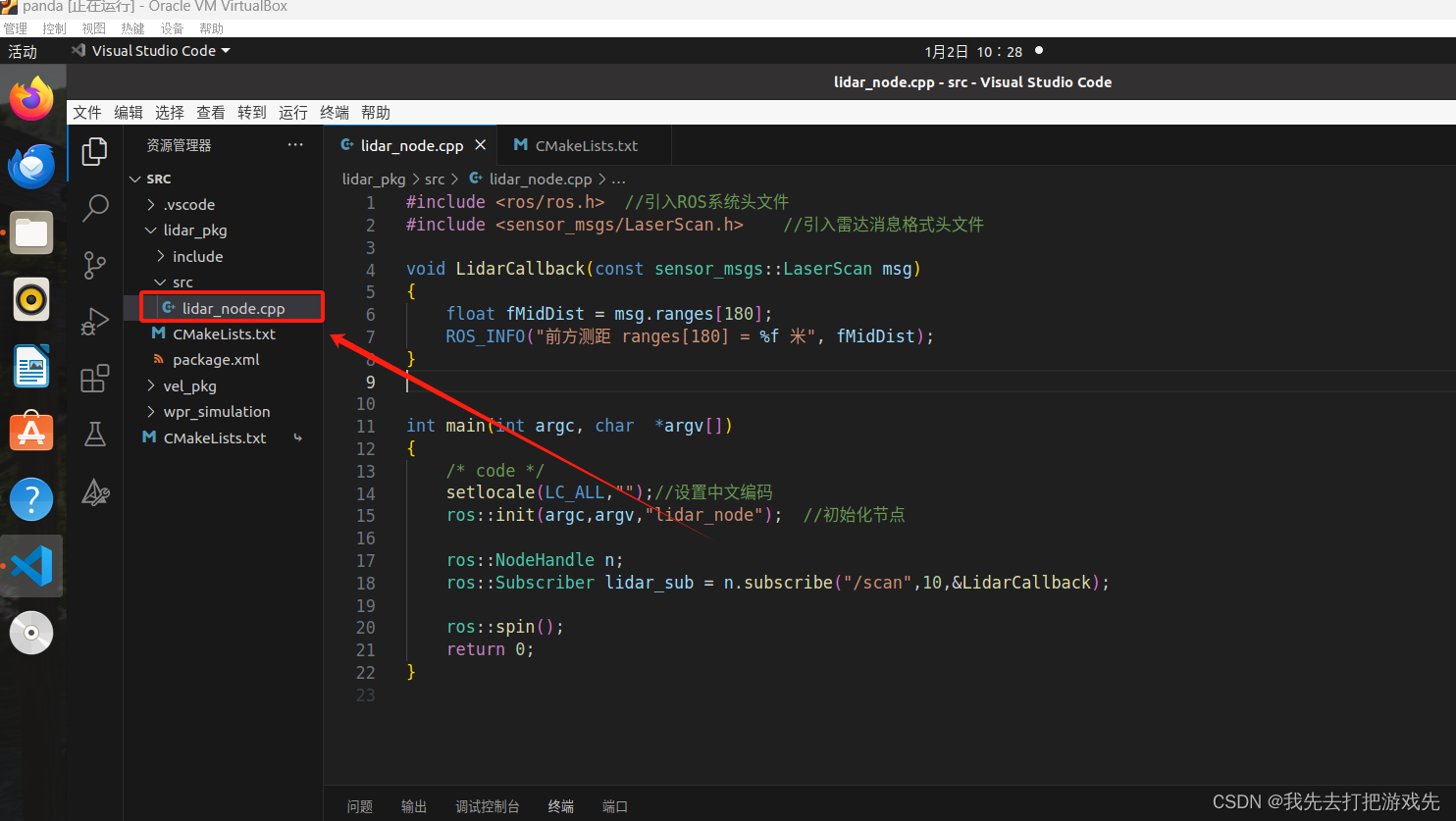
三、在lidar_node.cpp中写入如下代码
#include <ros/ros.h>
#include <std_msgs/String.h>
#include <sensor_msgs/LaserScan.h>
#include <geometry_msgs/Twist.h>
ros::Publisher vel_pub;
static int nCount = 0;
void LidarCallback(const sensor_msgs::LaserScan msg)
{
int nNum = msg.ranges.size();
int nMid = nNum/2;
float fMidDist = msg.ranges[nMid];
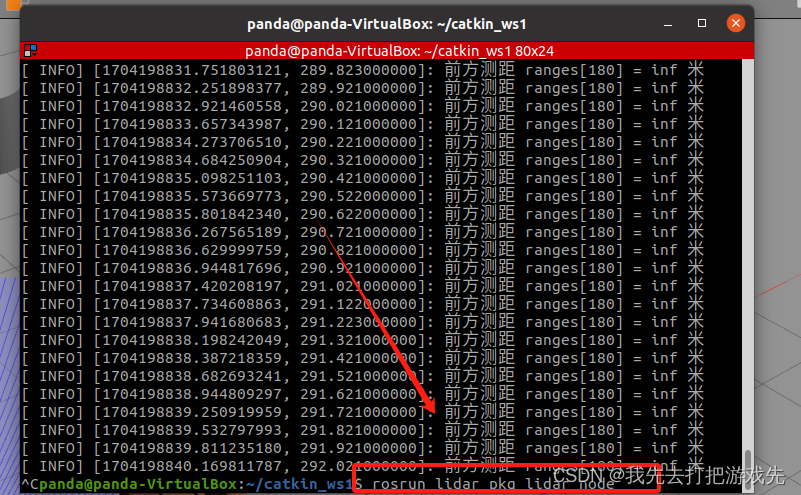
ROS_INFO("前方测距 ranges[%d] = %f 米", nMid, fMidDist);
if(nCount > 0)
{
nCount--;
return;
}
geometry_msgs::Twist vel_cmd;
if(fMidDist < 1.5f)
{
vel_cmd.angular.z = 0.3;
nCount = 50;
}
else
{
vel_cmd.linear.x = 0.05;
}
vel_pub.publish(vel_cmd);
}
int main(int argc, char** argv)
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"demo_lidar_behavior");
ros::NodeHandle n;
ros::Subscriber lidar_sub = n.subscribe("/scan", 10, &LidarCallback);
vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel",10);
ros::spin();
}
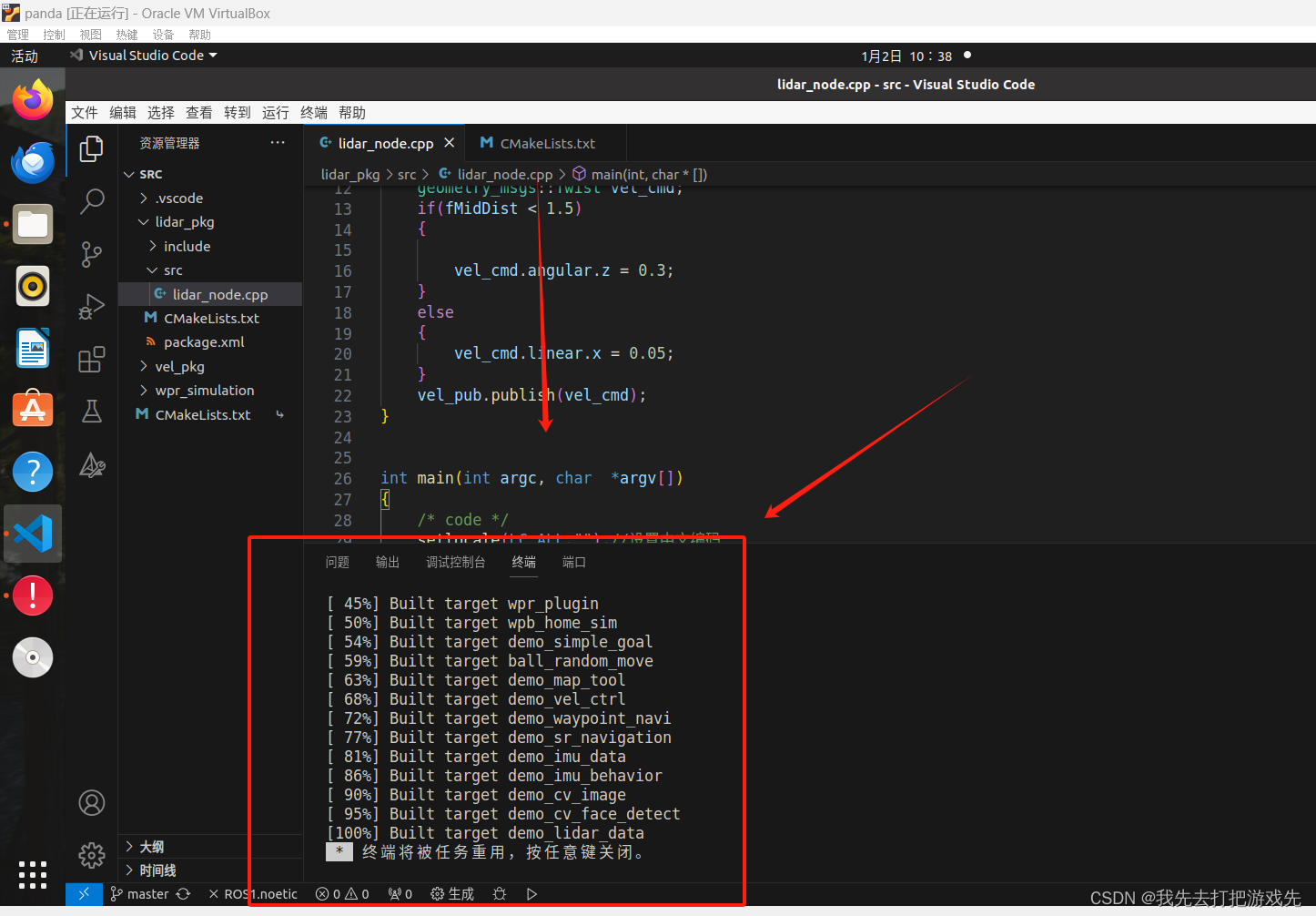
四、保存后,输入Shift+Ctrl+B进行编译,选择catkin_make:build

五、编译成功
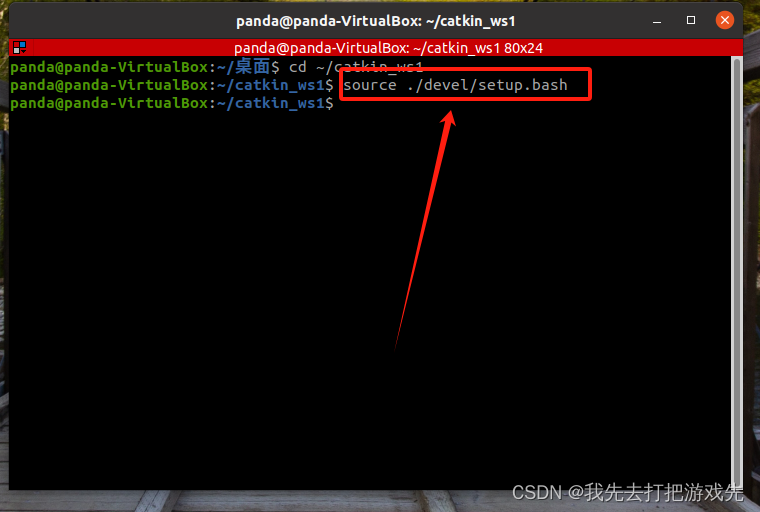
六、打开一个终端,输入cd ~/catkin_ws1进入工作空间

七、输入source ./devel/setup.bash
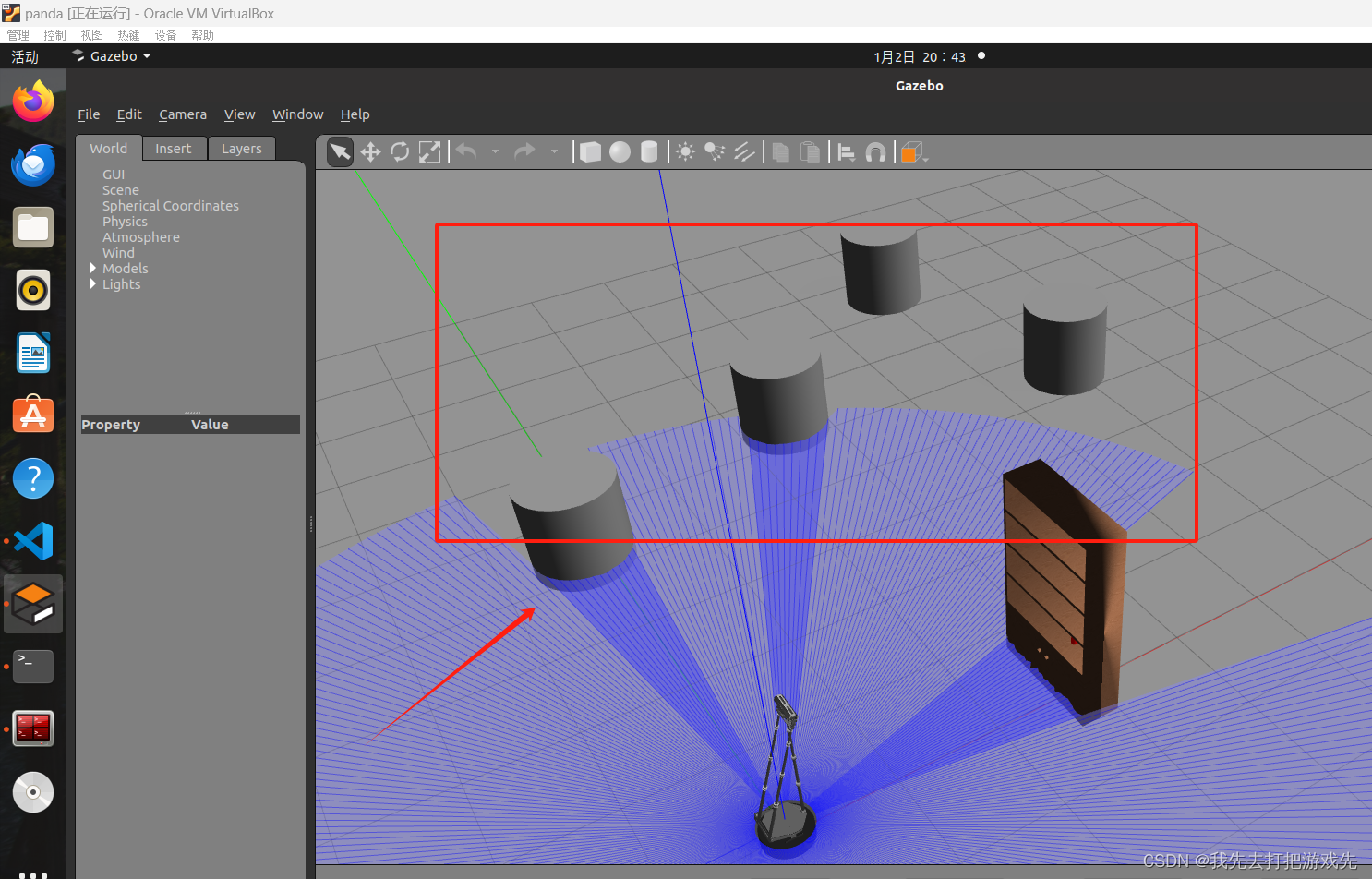
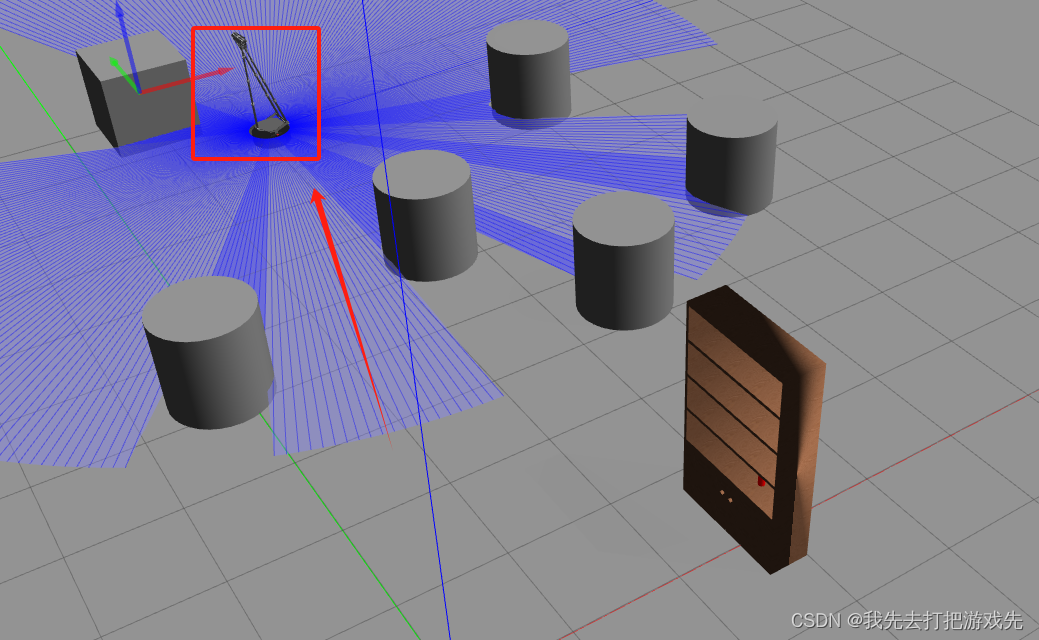
八、输入roslaunch wpr_simulation wpb_simple.launch打开机器人仿真环境
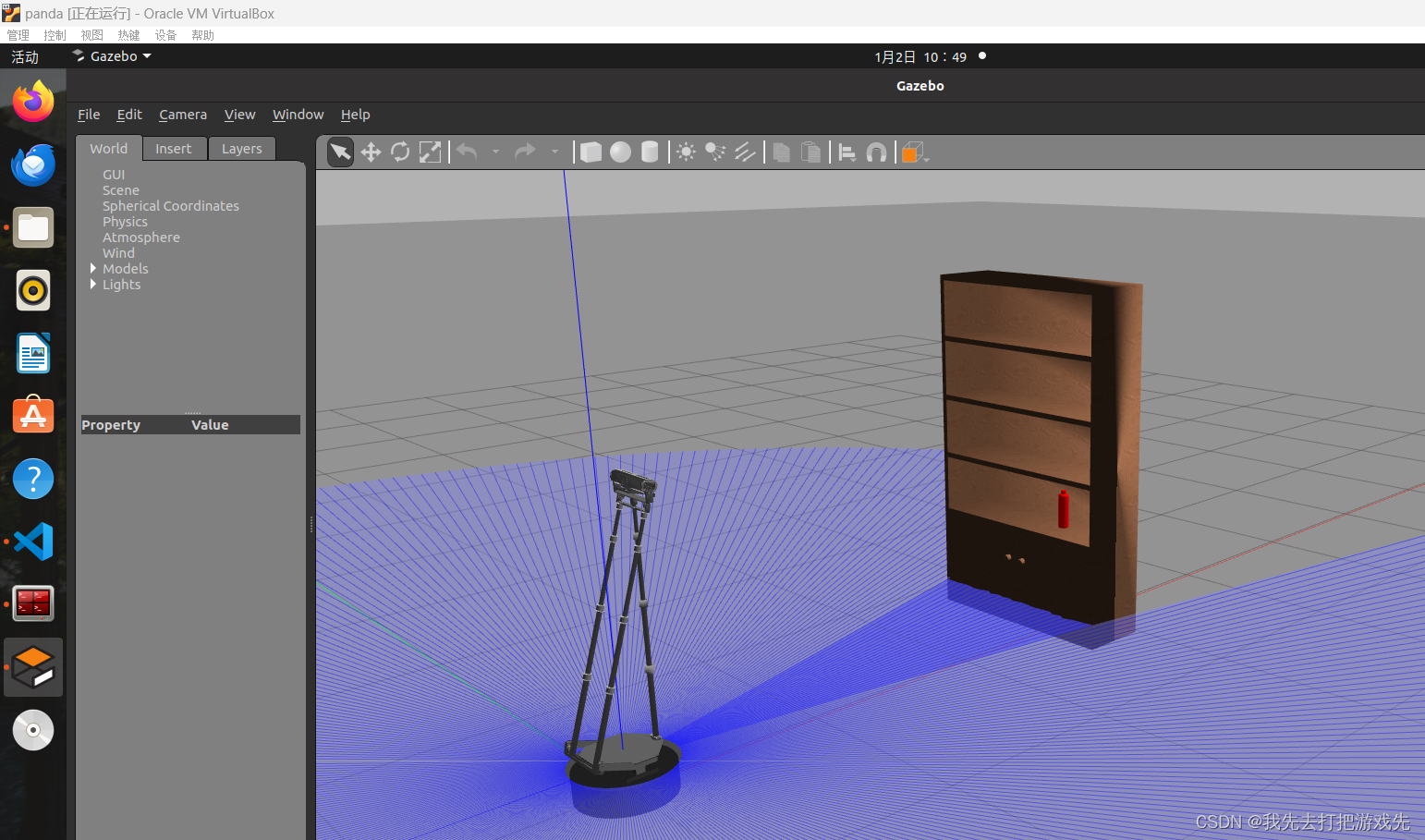
九、机器人仿真环境打开成功
十、再打开一个工作空间终端,输入source ./devel/setup.bash

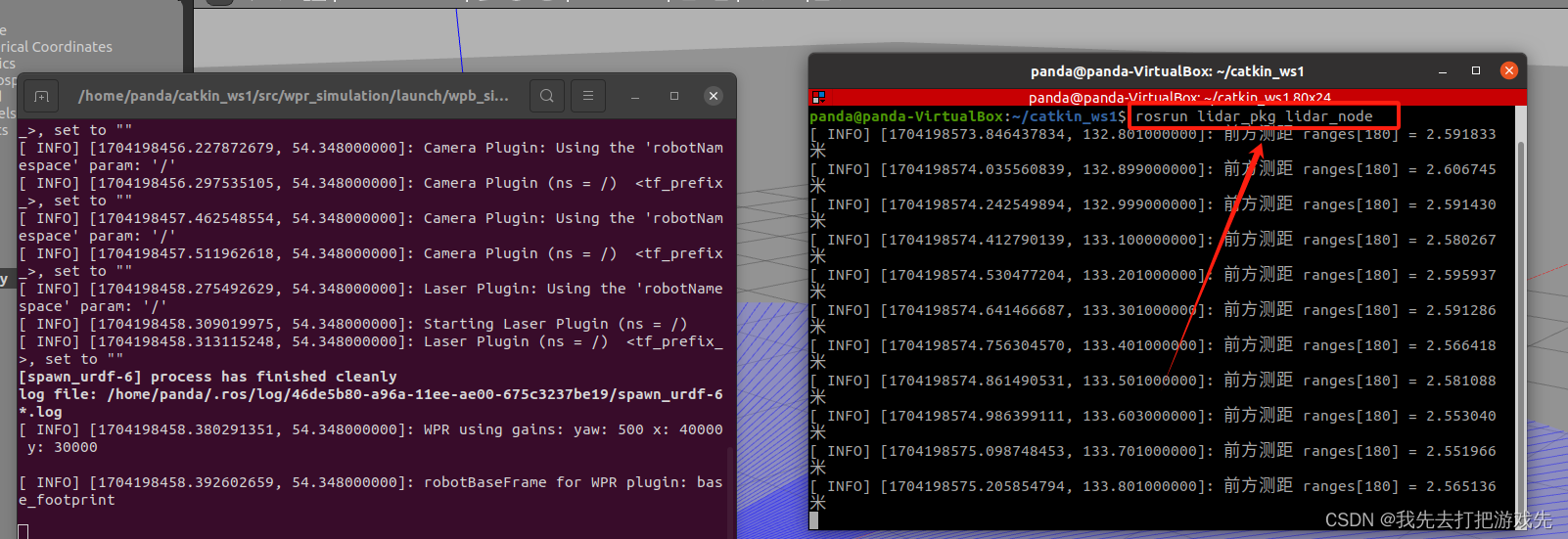
十一、输入rosrun lidar_pkg lidar_node
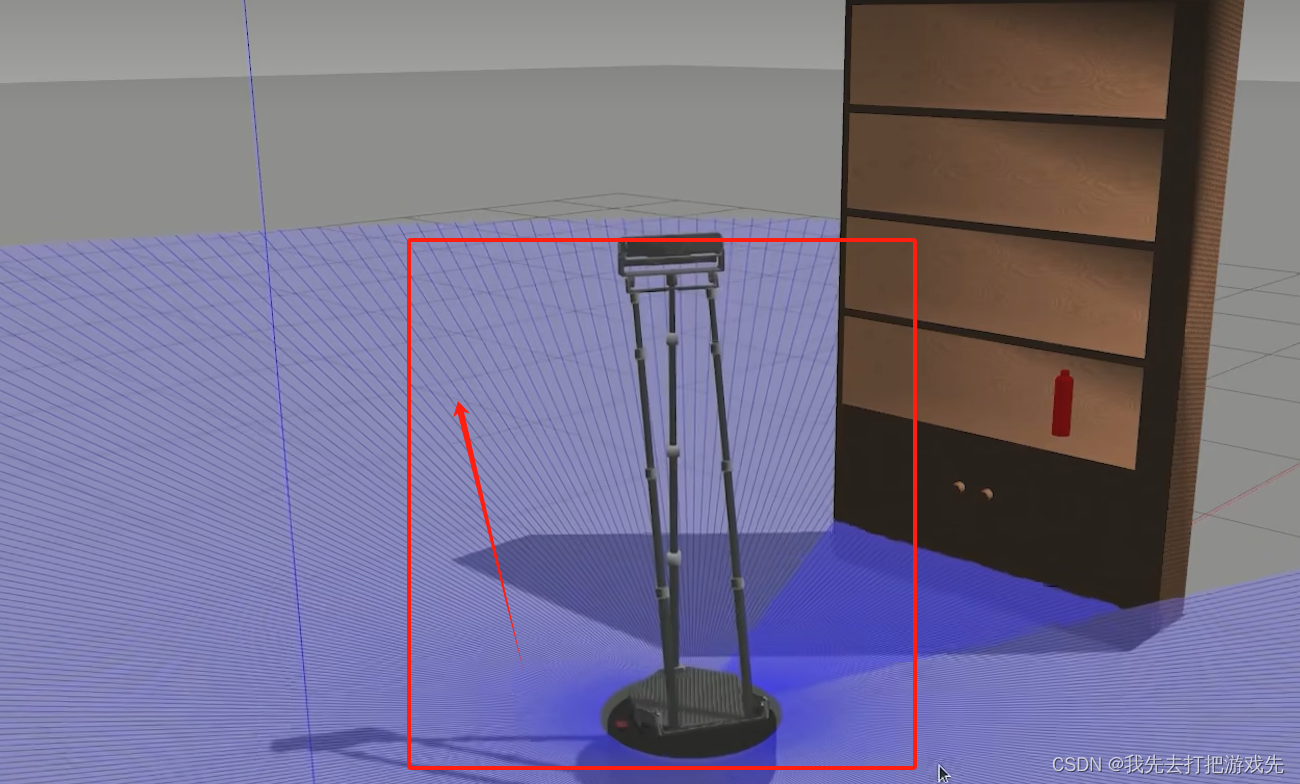
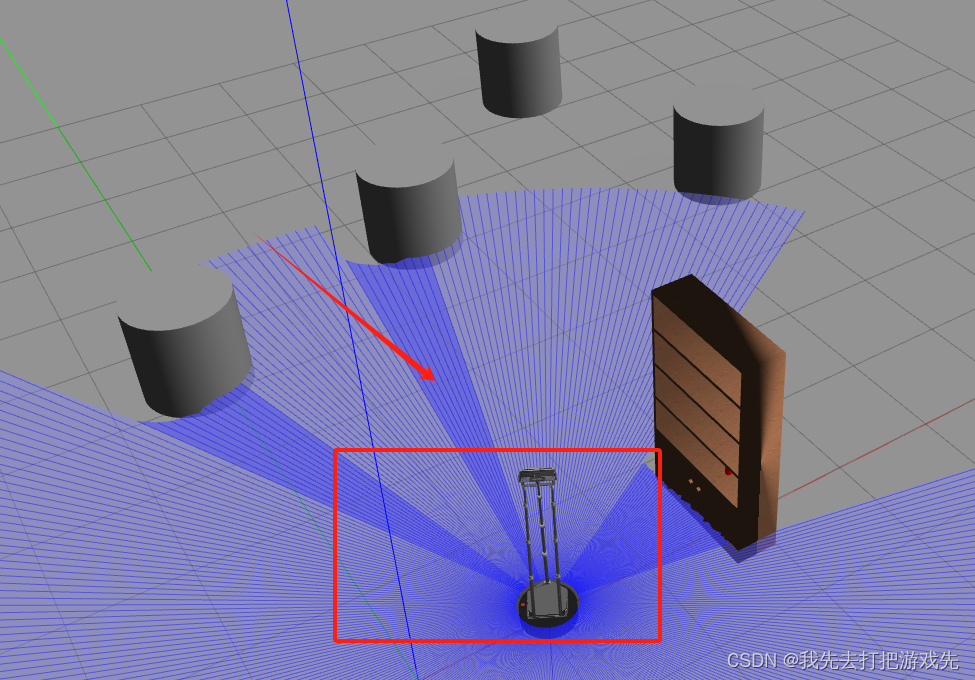
十二、查看仿真环境中的机器人,可以看到机器人向前运动

十三、在机器人将要碰到书柜时,机器人成功转向再向前运动,避障成功
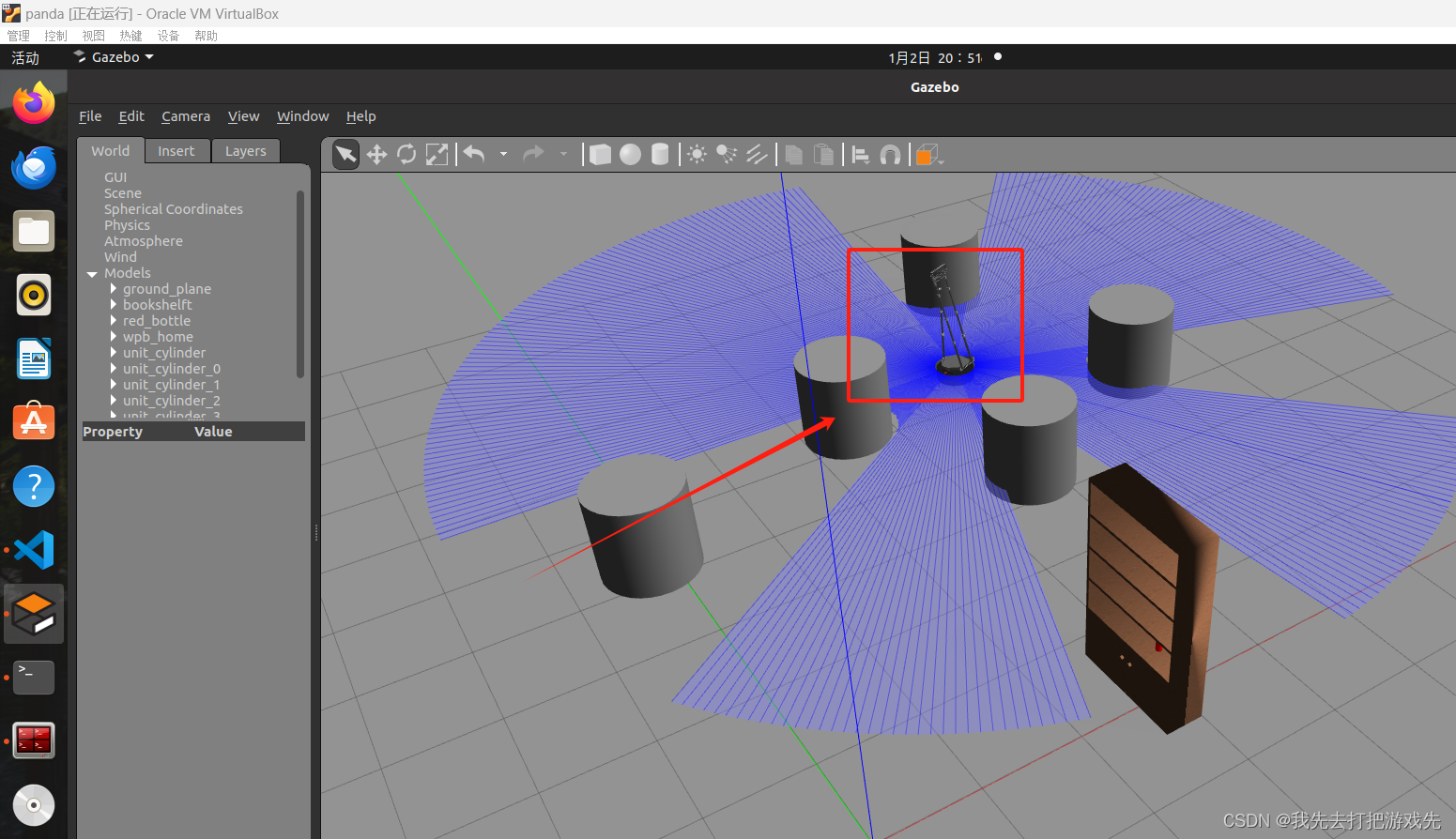
十四、给机器人添加上一些圆柱体障碍物,看它能不能也成功避障
十五、重新运行节点
十六、测试发现,机器人能够连续避障,不过只有当障碍物在机器人的正前方才会避障成功,因为在代码里我们只判断了机器人正前方的距离,机器人还是有可能会发生侧边碰撞,所以要想机器人做全方位避障,还需对代码进行进一步优化,需要对各方向的距离值做进一步处理
文章来源:https://blog.csdn.net/qq_52251819/article/details/135334912
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- CentOS 7系统加固详细方案SSH FTP MYSQL加固
- 第十章 文件与异常
- Vue基础-搭建Vue运行环境
- 基于Java SSM框架实现医院挂号上班打卡系统项目【项目源码+论文说明】计算机毕业设计
- Android 11.0 系统开启和关闭黑白模式主题功能实现
- py值利用web库搭建一个http文件服务器
- 【C++进阶05】AVL树的介绍及模拟实现
- MEMS热式气体流量传感器及其应用选型
- web自动化(6)——项目配置和Grid分布式
- uni-app只执行一次事件