【无标题】
发布时间:2023年12月22日
图像ISP处理——畸变校正算法
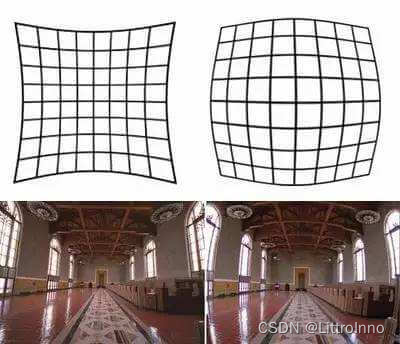
图像畸变校正算法主要用于矫正图像中因为摄像机镜头畸变而引起的形状和尺寸变化。摄像机镜头畸变主要包括径向畸变和切向畸变。以下是一些常见的图像畸变校正算法:
- 多项式畸变校正法(Polynomial Distortion Correction):
- 原理: 使用多项式函数来建模畸变,并通过拟合图像中的畸变点来确定多项式系数。
- 工作方式: 通过收集具有已知几何形状的校准目标的图像,然后使用多项式函数将畸变校正应用于整个图像。
- 优点: 简单易懂,适用于径向畸变的校正。
- 缺点: 在处理切向畸变时性能可能较差。
- 相机标定法(Camera Calibration):
- 原理: 通过采集一系列校准图像,通过检测特定模式(如棋盘格)上的角点并估计相机参数,包括畸变系数。
- 工作方式: 利用相机参数进行畸变矫正,可以校正径向和切向畸变。
- 优点: 提供全面的相机参数,适用于各种类型的畸变。
- 缺点: 需要校准图像和相机参数估计,对摄像机位置和姿态比较敏感。
- 反向映射法(Reverse Mapping):
- 原理: 通过构建畸变映射关系的反向映射来对图像进行校正。
- 工作方式: 对于每个校正后的像素,通过反向映射找到对应的畸变前的像素位置。
- 优点: 直观简单,可适应不规则畸变。
- 缺点: 计算复杂度较高,可能需要进行插值操作。
- 双目视觉法(Stereo Vision):
- 原理: 利用两个相机的视角差异来推断深度信息,并通过深度信息进行畸变校正。
- 工作方式: 利用立体匹配算法获取深度图,然后使用深度信息进行畸变矫正。
- 优点: 能够处理复杂的畸变情况,提供深度信息。
- 缺点: 需要两个相机,计算复杂度高。
- 张正友畸变校正法(Zhang's Distortion Correction):
- 原理: 基于相机标定的理论,使用张正友标定法估计相机参数,从而实现畸变校正。
- 工作方式: 利用已知几何形状的校准目标,通过最小二乘法求解相机参数,然后进行畸变校正。
- 优点: 适用于各种类型的畸变,相对准确。
- 缺点: 需要校准图像和相机参数估计。
这些算法的选择取决于具体的应用场景、摄像机类型、畸变程度以及可用的校准信息。在实际应用中,通常需要综合考虑算法的准确性、计算效率和适用性。
相机标定是用于估计摄像机内部和外部参数的过程,以便在图像中进行准确的畸变矫正。以下是相机标定法用于畸变校正的详细步骤和相关算法公式:
相机标定法的步骤:
- 采集校准图像:
- 通过在场景中放置已知几何形状(通常使用棋盘格)的标定板,采集一系列不同角度和位置的图像。
- 提取角点:
- 对于每张校准图像,检测标定板上的角点。这可以通过图像处理技术(如角点检测算法)来完成。
- 建立图像坐标和实际世界坐标对应关系:
- 将每个检测到的角点映射到标定板的实际世界坐标上。通常,标定板上的角点被认为位于一个已知的3D坐标系中。
- 相机参数估计:
- 使用标定板上的角点在图像中的坐标和对应的实际世界坐标,通过最小二乘法估计相机的内部参数(如焦距、主点坐标)和外部参数(相机的旋转矩阵和平移矩阵)。
- 畸变系数估计:
- 估计径向畸变和切向畸变的系数。径向畸变一般用多项式函数进行建模,切向畸变则用二次项建模。畸变系数通常表示为k1, k2, p1, p2, k3等。
- 相机矩阵计算:
- 使用相机内部参数和畸变系数构建相机矩阵(Camera Matrix)。
畸变校正的步骤:
- 相机坐标系到图像坐标系的转换:
对于每个图像点 (u,v),将其从相机坐标系变换到归一化图像坐标系,公式为:

(xc?,yc?,zc?) 是相机坐标系下的点。
- 畸变校正:
利用径向畸变和切向畸变的参数进行校正:
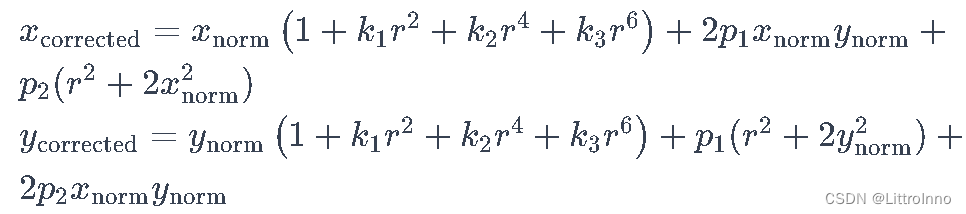
其中,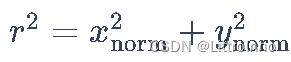
- 反投影:
将校正后的归一化图像坐标转换回相机坐标系:

- 图像坐标到像素坐标的转换:
将相机坐标系下的点投影到像素坐标系,最终得到畸变校正后的图像。
这些步骤和公式提供了相机标定法用于畸变校正的基本框架。在实际应用中,可以使用开源库(例如OpenCV)提供的函数来简化标定和畸变校正的过程。
文章来源:https://blog.csdn.net/kwdx2/article/details/135148355
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 解决 Git:ssh: connect to host github.com port 22: Connection timed out 问题的三种方案
- 五个因素影响弧形导轨的精度
- 6 最大积水量
- LeetCode-数组-双指针-中等难度
- 从0开始,模拟集成电路设计Cadence Virtuoso学习笔记(二)反相器原理图绘制及仿真
- Java项目:06 Springboot的进销存管理系统
- ros2 学习08 topic 话题定义及示例
- 淘宝npm镜像域名到期cnpm.org搭建的cnpm私有镜像下载报错解决方案
- 深入了解WPF控件:基础属性与用法(五)
- pyDAL一个python的ORM(终) pyDAL的一些性能优化