【操作系统】存储器管理
目录
2. 装入时动态链接(Load-time Dynamic Linking)
? 3. 运行时动态链接(Run-time Dynamic Linking)
4.5.5 ?反置页表(Inverted Page Table)
4.1 ?存储器的层次结构
? ?存储器的理想状态:
????????速度非常快,能跟上处理机的速度
????????容量非常大,能容纳所有要运行的作业
????????价格很便宜,不需要花费额外的钱
4.1.1 多级存储结构
????????对于通用计算机而言,存储层次至少应具有三级:最高层为CPU寄存器,中间为主存,最底层是辅存。在较高档的计算机中,还可以根据具体的功能细分为寄存器、高速缓存、主存储器、磁盘缓存、固定磁盘、可移动存储介质等6层。如下图所示。

4.1. 2 可执行存储器
? ? ? ? 在计算机系统的存储层次中,寄存器和主存储器又被称为可执行存储器。对于存放于其中的信息,与存放于辅存中的信息相比较而言,计算机所采用的访问机制是不同的,所需耗费的时间也是不同的。进程可以在很少的时钟周期内使用一条load或store指令对可执行存储器进行访问。但对辅存的访问则需要通过I/O设备实现,因此,在访问中将涉及到中断、设备驱动程序以及物理设备的运行,所需耗费的时间远远高于访问可执行存储器的时间,一般相差3个数量级甚至更多。
主存储器和寄存器
????????1. 主存储器 主存储器简称内存或主存,是计算机系统中的主要部件,用于保存进程运行时的程序和数据,也称可执行存储器。
????????2. 寄存器 寄存器具有与处理机相同的速度,故对寄存器的访问速度最快,完全能与CPU协调工作,但价格却十分昂贵,因此容量不可能做得很大。
4.1.3 高速缓存和磁盘缓存
????????1. 高速缓存 高速缓存是现代计算机结构中的一个重要部件,它是介于寄存器和存储器之间的存储器,主要用于备份主存中较常用的数据,以减少处理机对主存储器的访问次数,这样可大幅度地提高程序执行速度。高速缓存容量远大于寄存器,而比内存约小两到三个数量级左右,从几十KB到几MB,访问速度快于主存储器。
????????2. 磁盘缓存 由于目前磁盘的I/O速度远低于对主存的访问速度,为了缓和两者之间在速度上的不匹配,而设置了磁盘缓存,主要用于暂时存放频繁使用的一部分磁盘数据和信息,以减少访问磁盘的次数。但磁盘缓存与高速缓存不同,它本身并不是一种实际存在的存储器,而是利用主存中的部分存储空间暂时存放从磁盘中读出(或写入)的信息。主存也可以看作是辅存的高速缓存,因为,辅存中的数据必须复制到主存方能使用,反之,数据也必须先存在主存中,才能输出到辅存。
4.2 ?程序的装入和链接
????????在多道程序环境下,要使程序运行,必须先为之创建进程。而创建进程的第一件事,便是将程序和数据装入内存。如何将一个用户源程序变为一个可在内存中执行的程序,通常都要经过以下几个步骤: ? ?
????????首先是要编译,由编译程序(Compiler)将用户源代码编译成若干个目标模块(Object Module);? ?
????????其次是链接,由链接程序(Linker)将编译后形成的一组目标模块,以及它们所需要的库函数链接在一起,形成一个完整的装入模块(Load Module); ? ?
????????最后是装入,由装入程序(Loader)将装入模块装入内存。 ? ?
? ? ? ?

?4.2.1 程序的装入
????????为了阐述上的方便,我们先介绍一个无需进行链接的单个目标模块的装入过程。该目标模块也就是装入模块。在将一个装入模块装入内存时,可以有如下三种装入方式:
????????1. 绝对装入方式(Absolute Loading Mode)
????????当计算机系统很小,且仅能运行单道程序时,完全有可能知道程序将驻留在内存的什么位置。此时可以采用绝对装入方式。用户程序经编译后,将产生绝对地址(即物理地址)的目标代码。
????????2. 可重定位装入方式(Relocation Loading Mode)
????????绝对装入方式只能将目标模块装入到内存中事先指定的位置,这只适用于单道程序环境。而在多道程序环境下,编译程序不可能预知经编译后所得到的目标模块应放在内存的何处。因此,对于用户程序编译所形成的若干个目标模块,它们的起始地址通常都是从0开始的,程序中的其它地址也都是相对于起始地址计算的。
????????通常是把在装入时对目标程序中指令和数据的修改过程称为重定位。 又因为地址变换通常是在装入时一次完成的,以后不再改变,故称为静态重定位。
????????3.动态运行时的装入方式(Dynamic Run-time Loading)
????????可重定位装入方式可将装入模块装入到内存中任何允许的位置,故可用于多道程序环境。但该方式并不允许程序运行时在内存中移动位置。
?4.2.2 程序的链接
1.静态链接(Static Linking)方式

????????在程序运行之前,先将各目标模块及它们所需的库函数链接成一个完整的装配模块,以后不再拆开。设有经过编译后所得到的三个目标模块A、B、C,它们的长度分别为L、M和N。在模块A中有一条语句CALL B,用于调用模块B。在模块B中有一条语句CALL C,用于调用模块C。B和C都属于外部调用符号,在将这几个目标模块装配成一个装入模块时,须解决以下两个问题: (1) 对相对地址进行修改。 (2) 变换外部调用符号。
????????(1) 对相对地址进行修改。
????????在由编译程序所产生的所有目标模块中,使用的都是相对地址,其起始地址都为0,每个模块中的地址都是相对于起始地址计算的。 ? ?
????????在链接成一个装入模块后,原模块B和C在装入模块的起始地址不再是0,而分别是L和L+M,所以此时须修改模块B和C中的相对地址,即把原B中的所有相对地址都加上L,把原C中的所有相对地址都加上L+M。
? ? ? ? ?(2) 变换外部调用符号。
????????将每个模块中所用的外部调用符号也都变换为相对地址,如把B的起始地址变换为L,把C的起始地址变换为L+M。 ? ?
????????这种先进行链接所形成的一个完整的装入模块,又称为可执行文件。通常都不再拆开它,要运行时可直接将它装入内存。这种事先进行链接,以后不再拆开的链接方式,称为静态链接方式。
2. 装入时动态链接(Load-time Dynamic Linking)
????????这是指将用户源程序编译后所得到的一组目标模块,在装入内存时,采用边装入边链接的链接方式。即在装入一个目标模块时,若发生一个外部模块调用事件,将引起装入程序去找出相应的外部目标模块,并将它装入内存,还要按照图4-4所示的方式修改目标模块中的相对地址。装入时动态链接方式有以下优点: (1) 便于修改和更新。 (2) 便于实现对目标模块的共享。
? 3. 运行时动态链接(Run-time Dynamic Linking)
????????在许多情况下,应用程序在运行时,每次要运行的模块可能是不相同的。但由于事先无法知道本次要运行哪些模块,故只能是将所有可能要运行到的模块全部都装入内存,并在装入时全部链接在一起。显然这是低效的,因为往往会有部分目标模块根本就不运行。比较典型的例子是作为错误处理用的目标模块,如果程序在整个运行过程中都不出现错误,则显然就不会用到该模块。
4.3 ?连续分配存储管理方式
4.3.1 单一连续分配
????????在单道程序环境下,当时的存储器管理方式是把内存分为系统区和用户区两部分,系统区仅提供给OS使用,它通常是放在内存的低址部分。而在用户区内存中,仅装有一道用户程序,即整个内存的用户空间由该程序独占。这样的存储器分配方式被称为单一连续分配方式。
????????虽然在早期的单用户、单任务操作系统中,有不少都配置了存储器保护机构,用于防止用户程序对操作系统的破坏,但常见的几种单用户操作系统中,如CP/M、MS-DOS及RT11等,都未采取存储器保护措施。 ? ?
????????这是因为,一方面可以节省硬件,另一方面也因为这是可行的。在单用户环境下,机器由一用户独占,不可能存在其他用户干扰的问题; ? ?
????????这时可能出现的破坏行为也只是用户程序自己去破坏操作系统,其后果并不严重,只是会影响该用户程序的运行,且操作系统也很容易通过系统的再启动而重新装入内存。
?4.3.2 固定分区分配
1.划分分区的方法
????????可用下述两种方法将内存的用户空间划分为若干个固定大小的分区:
????????????????分区大小相等:即使所有的内存分区大小相等。其缺点是缺乏灵活性,即当程序太小时,会造成内存空间的浪费;当程序太大时,一个分区又不足以装入该程序,致使该程序无法运行。尽管如此,这种划分方式仍被用于利用一台计算机去控制多个相同对象的场合,因为这些对象所需的内存空间是大小相等的。例如,炉温群控系统,就是利用一台计算机去控制多台相同的冶炼炉。?
????????????????分区大小不等:为了克服分区大小相等而缺乏灵活性的这个缺点,可把内存区划分成含有多个较小的分区、适量的中等分区及少量的大分区。这样,便可根据程序的大小为之分配适当的分区。
2.内存分配 ? ?
???????? 为了便于内存分配,通常将分区按大小进行排队,并为之建立一张分区使用表,其中各表项包括每个分区的起始地址、大小及状态(是否已分配),? ? ? ? ?
????????当有一用户程序要装入时,由内存分配程序检索该表,从中找出一个能满足要求的、尚未分配的分区,将之分配给该程序,然后将该表项中的状态置为“已分配”;若未找到大小足够的分区,则拒绝为该用户程序分配内存。

?4.3.3 动态分区分配
1.动态分区分配中的数据结构 ?
????????常用的数据结构有以下两种形式:① 空闲分区表,在系统中设置一张空闲分区表,用于记录每个空闲分区的情况。每个空闲分区占一个表目,表目中包括分区号、分区大小和分区始址等数据项。② 空闲分区链。为了实现对空闲分区的分配和链接,在每个分区的起始部分设置一些用于控制分区分配的信息,以及用于链接各分区所用的前向指针,在分区尾部则设置一后向指针。通过前、后向链接指针,可将所有的空闲分区链接成一个双向链。

2.动态分区分配算法
????????为把一个新作业装入内存,须按照一定的分配算法,从空闲分区表或空闲分区链中选出一分区分配给该作业。由于内存分配算法对系统性能有很大的影响,故人们对它进行了较为广泛而深入的研究,于是产生了许多动态分区分配算法。
3. 分区分配操作
????????1) 分配内存
???????? 系统应利用某种分配算法,从空闲分区链(表)中找到所需大小的分区。设请求的分区大小为u.size,表中每个空闲分区的大小可表示为m.size。

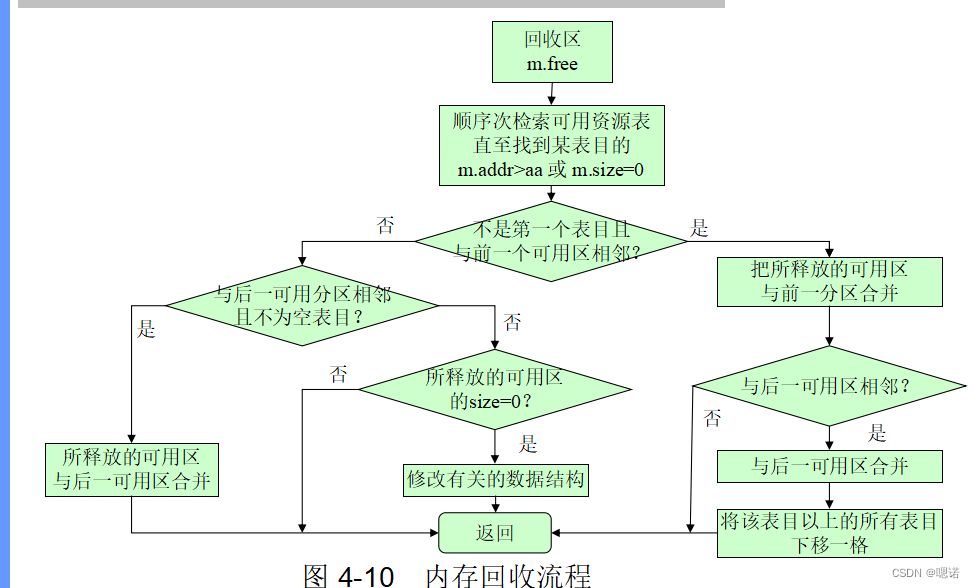
2) 回收内存 ?
????????当进程运行完毕释放内存时,系统根据回收区的首址,从空闲区链(表)中找到相应的插入点,此时可能出现以下四种情况之一:
????????(1) 回收区与插入点的前一个空闲分区F1相邻接。此时应将回收区与插入点的前一分区合并,不必为回收分区分配新表项,而只需修改其前一分区F1的大小。
????????(2) 回收分区与插入点的后一空闲分区F2相邻接。此时也可将两分区合并,形成新的空闲分区,但用回收区的首址作为新空闲区的首址,大小为两者之和。
????????(3) 回收区同时与插入点的前、后两个分区邻接,见图4-8(c)。此时将三个分区合并,使用F1的表项和F1的首址,取消F2的表项,大小为三者之和。
???????? (4) 回收区既不与F1邻接,又不与F2邻接。这时应为回收区单独建立一新表项,填写回收区的首址和大小,并根据其首址插入到空闲链中的适当位置。
?4.3.4 基于顺序搜索的动态分区分配算法
????????1) 首次适应算法(First Fit)
????????我们以空闲分区链为例来说明采用FF算法时的分配情况。FF算法要求空闲分区链以地址递增的次序链接。 在分配内存时,从链首开始顺序查找,直至找到一个大小能满足要求的空闲分区为止; 然后再按照作业的大小,从该分区中划出一块内存空间分配给请求者,余下的空闲分区仍留在空闲链中。 若从链首直至链尾都不能找到一个能满足要求的分区,则此次内存分配失败,返回。
????????首次适应算法倾向于优先利用内存中低址部分的空闲分区,从而保留了高址部分的大空闲区。这给为以后到达的大作业分配大的内存空间创造了条件。 ? ?
????????其缺点是低址部分不断被划分,会留下许多难以利用的、很小的空闲分区,而每次查找又都是从低址部分开始,这无疑会增加查找可用空闲分区时的开销。
2) 循环首次适应算法(Next Fit)
????????该算法是由首次适应算法演变而成的。在为进程分配内存空间时,不再是每次都从链首开始查找,而是从上次找到的空闲分区的下一个空闲分区开始查找,直至找到一个能满足要求的空闲分区,从中划出一块与请求大小相等的内存空间分配给作业。 ? ?
????????为实现该算法,应设置一起始查寻指针,用于指示下一次起始查寻的空闲分区,并采用循环查找方式,即如果最后一个(链尾)空闲分区的大小仍不能满足要求,则应返回到第一个空闲分区,比较其大小是否满足要求。找到后,应调整起始查寻指针。 ? ?
????????该算法能使内存中的空闲分区分布得更均匀,从而减少了查找空闲分区时的开销,但这样会缺乏大的空闲分区。
3) 最佳适应算法(Best Fit)
???????? 所谓“最佳”是指每次为作业分配内存时,总是把能满足要求、又是最小的空闲分区分配给作业,避免“大材小用”。为了加速寻找,该算法要求将所有的空闲分区按其容量以从小到大的顺序形成一空闲分区链。这样,第一次找到的能满足要求的空闲区,必然是最佳的。 ? ? 孤立地看,最佳适应算法似乎是最佳的,然而在宏观上却不一定。因为每次分配后所切割下来的剩余部分总是最小的,这样,在存储器中会留下许多难以利用的小空闲区。
4) 最坏适应算法(Worst Fit)
???????? 最坏适应分配算法要扫描整个空闲分区表或链表,总是挑选一个最大的空闲区分割给作业使用,其优点是可使剩下的空闲区不至于太小,产生碎片的几率最小,对中、小作业有利,同时最坏适应分配算法查找效率很高。该算法要求将所有的空闲分区按其容量以从大到小的顺序形成一空闲分区链,查找时只要看第一个分区能否满足作业要求。 ? ? 但是该算法的缺点也是明显的,它会使存储器中缺乏大的空闲分区。最坏适应算法与前面所述的首次适应算法、循环首次适应算法、最佳适应算法一起,也称为顺序搜索法。
?4.3.5 基于索引搜索的动态分区分配算法
1. 快速适应算法(Quick Fit)
????????该算法又称为分类搜索法,是将空闲分区根据其容量大小进行分类,对于每一类具有相同容量的所有空闲分区,单独设立一个空闲分区链表,这样,系统中存在多个空闲分区链表,同时在内存中设立一张管理索引表,该表的每一个表项对应了一种空闲分区类型,并记录了该类型空闲分区链表表头的指针。 ? ?
????????空闲分区的分类是根据进程常用的空间大小进行划分,如2 KB、4 KB、8 KB等,对于其它大小的分区,如7 KB这样的空闲区,既可以放在8 KB的链表中,也可以放在一个特殊的空闲区链表中。
????????该算法的优点是查找效率高,仅需要根据进程的长度,寻找到能容纳它的最小空闲区链表,并取下第一块进行分配即可。另外该算法在进行空闲分区分配时,不会对任何分区产生分割,所以能保留大的分区,满足对大空间的需求,也不会产生内存碎片。
????????该算法的缺点是在分区归还主存时算法复杂,系统开销较大。 ? ?
???????? 此外,该算法在分配空闲分区时是以进程为单位,一个分区只属于一个进程,因此在为进程所分配的一个分区中,或多或少地存在一定的浪费。空闲分区划分越细,浪费则越严重,整体上会造成可观的存储空间浪费,这是典型的以空间换时间的作法。
2. 伙伴系统(buddy system)
???????? 该算法规定,无论已分配分区或空闲分区,其大小均为2的k次幂(k为整数,l≤k≤m)。通常2m是整个可分配内存的大小(也就是最大分区的大小)。假设系统的可利用空间容量为2m 个字,则系统开始运行时,整个内存区是一个大小为2m的空闲分区。在系统运行过程中,由于不断地划分,将会形成若干个不连续的空闲分区,将这些空闲分区按分区的大小进行分类。对于具有相同大小的所有空闲分区,单独设立一个空闲分区双向链表,这样,不同大小的空闲分区形成了k个空闲分区链表。
????????在伙伴系统中,对于一个大小为2k,地址为x的内存块,其伙伴块的地址则用buddyk(x)表示,其通式为:

? ? ? ? ? 在伙伴系统中,其分配和回收的时间性能取决于查找空闲分区的位置和分割、合并空闲分区所花费的时间。 ? ? ?
???????? 与前面所述的多种方法相比较,由于该算法在回收空闲分区时,需要对空闲分区进行合并,所以其时间性能比前面所述的分类搜索算法差,但比顺序搜索算法好,而其空间性能则远优于前面所述的分类搜索法,比顺序搜索法略差。
3. 哈希算法
????????在上述的分类搜索算法和伙伴系统算法中,都是将空闲分区根据分区大小进行分类,对于每一类具有相同大小的空闲分区,单独设立一个空闲分区链表。在为进程分配空间时,需要在一张管理索引表中查找到所需空间大小所对应的表项,从中得到对应的空闲分区链表表头指针,从而通过查找得到一个空闲分区。如果对空闲分区分类较细,则相应索引表的表项也就较多,因此会显著地增加搜索索引表的表项的时间开销。
????????? 哈希算法就是利用哈希快速查找的优点,以及空闲分区在可利用空间表中的分布规律,建立哈希函数,构造一张以空闲分区大小为关键字的哈希表,该表的每一个表项记录了一个对应的空闲分区链表表头指针。 当进行空闲分区分配时,根据所需空闲分区大小,通过哈希函数计算,即得到在哈希表中的位置,从中得到相应的空闲分区链表,实现最佳分配策略。
?4.3.6 可重定位分区分配
1. 紧凑
???????? 连续分配方式的一个重要特点是,一个系统或用户程序必须被装入一片连续的内存空间中。当一台计算机运行了一段时间后,它的内存空间将会被分割成许多小的分区,而缺乏大的空闲空间。即使这些分散的许多小分区的容量总和大于要装入的程序,但由于这些分区不相邻接,也无法把该程序装入内存。
2.动态重定位
????????在动态运行时装入的方式中,作业装入内存后的所有地址都仍然是相对地址,将相对地址转换为物理地址的工作,被推迟到程序指令要真正执行时进行。 ? ?
????????为使地址的转换不会影响到指令的执行速度,必须有硬件地址变换机构的支持,即须在系统中增设一个重定位寄存器,用它来存放程序(数据)在内存中的起始地址。 ? ?
????????程序在执行时,真正访问的内存地址是相对地址与重定位寄存器中的地址相加而形成的。
? ? ? ? 若想把作业装入,可采用的一种方法是:将内存中的所有作业进行移动,使它们全都相邻接,这样,即可把原来分散的多个小分区拼接成一个大分区,这时就可把作业装入该区。这种通过移动内存中作业的位置,以把原来多个分散的小分区拼接成一个大分区的方法,称为“拼接”或“紧凑”。 ? ?
???????? 由于经过紧凑后的某些用户程序在内存中的位置发生了变化,此时若不对程序和数据的地址加以修改(变换),则程序必将无法执行。为此,在每次“紧凑”后,都必须对移动了的程序或数据进行重定位。
3.动态重定位分区分配算法
????????动态重定位分区分配算法与动态分区分配算法基本上相同,差别仅在于:在这种分配算法中,增加了紧凑的功能。通常,当该算法不能找到一个足够大的空闲分区以满足用户需求时,如果所有的小的空闲分区的容量总和大于用户的要求,这时便须对内存进行“紧凑”,将经“紧凑”后所得到的大空闲分区分配给用户。如果所有的小的空闲分区的容量总和仍小于用户的要求,则返回分配失败信息。

4.4 ?对换(Swapping)
????????对换技术也称为交换技术,最早用于麻省理工学院的单用户分时系统CTSS中。由于当时计算机的内存都非常小,为了使该系统能分时运行多个用户程序而引入了对换技术。系统把所有的用户作业存放在磁盘上,每次只能调入一个作业进入内存,当该作业的一个时间片用完时,将它调至外存的后备队列上等待,再从后备队列上将另一个作业调入内存。这就是最早出现的分时系统中所用的对换技术。现在已经很少使用。
4.4.1 ?多道程序环境下的对换技术
????????1.对换的引入
???????? 在多道程序环境下,一方面,在内存中的某些进程由于某事件尚未发生而被阻塞运行,但它却占用了大量的内存空间,甚至有时可能出现在内存中所有进程都被阻塞,而无可运行之进程,迫使CPU停止下来等待的情况;另一方面,却又有着许多作业,因内存空间不足,一直驻留在外存上,而不能进入内存运行。显然这对系统资源是一种严重的浪费,且使系统吞吐量下降。
????????为了解决这一问题,在系统中又增设了对换(也称交换)设施。所谓“对换”,是指把内存中暂时不能运行的进程或者暂时不用的程序和数据调出到外存上,以便腾出足够的内存空间,再把已具备运行条件的进程或进程所需要的程序和数据调入内存。对换是提高内存利用率的有效措施。 ? ?
????????自从在60年代初期出现“对换”技术后,它便引起了人们的重视,现在该技术已被广泛地应用于操作系统中。
?2.对换的类型
????????如果对换是以整个进程为单位的,便称之为“整体对换”或“进程对换”。这种对换被广泛地应用于分时系统中,其目的是用来解决内存紧张问题,并可进一步提高内存的利用率。 ? ? 而如果对换是以“页”或“段”为单位进行的,则分别称之为“页面对换”或“分段对换”,又统称为“部分对换”。这种对换方法是实现后面要讲到的请求分页和请求分段式存储管理的基础,其目的是为了支持虚拟存储系统。 ? ? 在此,我们只介绍进程对换,而分页或分段对换将放在虚拟存储器中介绍。为了实现进程对换,系统必须能实现三方面的功能:对换空间的管理、进程的换出,以及进程的换入。
4.4.2 ?对换空间的管理
1.对换空间管理的主要目标
????????在具有对换功能的OS中,通常把磁盘空间分为文件区和对换区两部分。
????????1) 对文件区管理的主要目标 ? ?
????????由于通常的文件都是较长久地驻留在外存上,故对文件区管理的主要目标,是提高文件存储空间的利用率,为此,对文件区采取离散分配方式。
????????2) 对对换空间管理的主要目标
???????? 然而,进程在对换区中驻留的时间是短暂的,对换操作又较频繁,故对换空间管理的主要目标,是提高进程换入和换出的速度。为此,采取的是连续分配方式,较少考虑外存中的碎片问题。
2.对换区空闲盘块管理中的数据结构
????????为了实现对对换区中的空闲盘块的管理,在系统中应配置相应的数据结构,用于记录外存对换区中的空闲盘块的使用情况。其数据结构的形式与内存在动态分区分配方式中所用数据结构相似,即同样可以用空闲分区表或空闲分区链。在空闲分区表的每个表目中,应包含两项:对换区的首址及其大小,分别用盘块号和盘块数表示。
3. 对换空间的分配与回收
???????? 由于对换分区的分配采用的是连续分配方式,因而对换空间的分配与回收与动态分区方式时的内存分配与回收方法雷同。其分配算法可以是首次适应算法、循环首次适应算法或最佳适应算法等。具体的分配操作也与图4-8中内存的分配过程相同。
4.4.3 ?进程的换出与换入
???????? 1.进程的换出
????????对换进程在实现进程换出时,是将内存中的某些进程调出至对换区,以便腾出内存空间。换出过程可分为以下两步: (1) 选择被换出的进程。 (2) 进程换出过程。
????????2.进程的换入
???????? 对换进程将定时执行换入操作,它首先查看PCB集合中所有进程的状态,从中找出“就绪”状态但已换出的进程。当有许多这样的进程时,它将选择其中已换出到磁盘上时间最久(必须大于规定时间,如2 s)的进程作为换入进程,为它申请内存。如果申请成功,可直接将进程从外存调入内存;如果失败,则需先将内存中的某些进程换出,腾出足够的内存空间后,再将进程调入。
4.5 ?分页存储管理方式
(1) 分页存储管理方式。 (2) 分段存储管理方式。 (3) 段页式存储管理方式。
4.5.1 ?分页存储管理的基本方法
????????1.页面和物理块
????????1)页面
????????分页存储管理是将一个进程的逻辑地址空间分成若干个大小相等的片,称为页面或页,并为各页加以编号,从0开始,如第0页、第1页等。相应地,也把内存空间分成与页面相同大小的若干个存储块,称为(物理)块或页框(frame),也同样为它们加以编号,如0#块、1#块等等。 ? ?
????????在为进程分配内存时,以块为单位将进程中的若干个页分别装入到多个可以不相邻接的物理块中。由于进程的最后一页经常装不满一块而形成了不可利用的碎片,称之为“页内碎片”。
????????2)页面大小
????????在分页系统中的页面其大小应适中。 ? ? ????????
????????页面若太小,一方面虽然可使内存碎片减小,从而减少了内存碎片的总空间,有利于提高内存利用率,但另一方面也会使每个进程占用较多的页面,从而导致进程的页表过长,占用大量内存;此外,还会降低页面换进换出的效率。 ? ? 然而,如果选择的页面较大,虽然可以减少页表的长度,提高页面换进换出的速度,但却又会使页内碎片增大。 ? ? 因此,页面的大小应选择适中,且页面大小应是2的幂,通常为512 B~8 KB。
2.地址结构 ? ? ?
????????分页地址中的地址结构如下:

????????它含有两部分:前一部分为页号P,后一部分为位移量W(或称为页内地址)。图中的地址长度为32位,其中0~11位为页内地址,即每页的大小为4 KB;12~31位为页号,地址空间最多允许有1 M页。
???????? 对于某特定机器,其地址结构是一定的。若给定一个逻辑地址空间中的地址为A,页面的大小为L,则页号P和页内地址d可按下式求得: ? ? ?
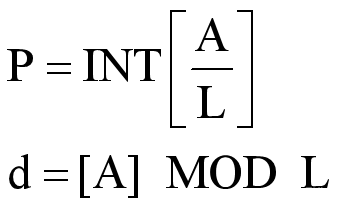
? ?
???????? ?其中,INT是整除函数,MOD是取余函数。例如,其系统的页面大小为1 KB,设A = 2170 B,则由上式可以求得P = 2,d = 122。
?????????3.页表
???????? 在分页系统中,允许将进程的各个页离散地存储在内存不同的物理块中,但系统应能保证进程的正确运行,即能在内存中找到每个页面所对应的物理块。为此,系统又为每个进程建立了一张页面映像表,简称页表。 ? ?
????????在进程地址空间内的所有页(0~n),依次在页表中有一页表项,其中记录了相应页在内存中对应的物理块号。在配置了页表后,进程执行时,通过查找该表,即可找到每页在内存中的物理块号。可见,页表的作用是实现从页号到物理块号的地址映射。

4.5.2 ?地址变换机构
???????? 页表的功能可以由一组专门的寄存器来实现。一个页表项用一个寄存器。由于寄存器具有较高的访问速度,因而有利于提高地址变换的速度;但由于寄存器成本较高,且大多数现代计算机的页表又可能很大,使页表项的总数可达几千甚至几十万个,显然这些页表项不可能都用寄存器来实现,因此,页表大多驻留在内存中。 ? ?
???????? 在系统中只设置一个页表寄存器PTR(Page-Table Register),在其中存放页表在内存的始址和页表的长度。平时,进程未执行时,页表的始址和页表长度存放在本进程的PCB中。当调度程序调度到某进程时,才将这两个数据装入页表寄存器中。因此,在单处理机环境下,虽然系统中可以运行多个进程,但只需一个页表寄存器。
1.基本地址变换机构
????????当进程要访问某个逻辑地址中的数据时,分页地址变换机构会自动地将有效地址(相对地址)分为页号和页内地址两部分,再以页号为索引去检索页表。查找操作由硬件执行。 ? ?
????????在执行检索之前,先将页号与页表长度进行比较,如果页号大于或等于页表长度,则表示本次所访问的地址已超越进程的地址空间。于是,这一错误将被系统发现并产生一地址越界中断。 ? ? 若未出现越界错误,则将页表始址与页号和页表项长度的乘积相加,便得到该表项在页表中的位置,于是可从中得到该页的物理块号,将之装入物理地址寄存器中。与此同时,再将有效地址寄存器中的页内地址送入物理地址寄存器的块内地址字段中。这样便完成了从逻辑地址到物理地址的变换。

?2.具有块表的地址变换机构
???????? 由于页表是存放在内存中的,这使CPU在每存取一个数据时,都要两次访问内存。第一次是访问内存中的页表,从中找到指定页的物理块号,再将块号与页内偏移量d拼接,以形成内存物理地址。第二次访问内存时,才是从第一次所得内存物理地址中获得所需数据(或向此地址中写入数据)。 因此,采用这种方式将使计算机的处理速度降低近1/2。可见,以此高昂代价来换取存储器空间利用率的提高,是得不偿失的。
???????? 为了提高地址变换速度,可在地址变换机构中增设一个具有并行查寻能力的特殊高速缓冲寄存器,又称为“联想寄存器”(Associative Memory),或称为“快表”,在IBM系统中又取名为TLB(Translation Lookaside Buffer),用以存放当前访问的那些页表项。 ? ?
????????此时的地址变换过程是:在CPU给出有效地址后,由地址变换机构自动地将页号P送入高速缓冲寄存器,并将此页号与高速缓存中的所有页号进行比较,若其中有与此相匹配的页号,便表示所要访问的页表项在快表中。于是,可直接从快表中读出该页所对应的物理块号,并送到物理地址寄存器中。 ? ?
????????如在块表中未找到对应的页表项,则还须再访问内存中的页表,找到后,把从页表项中读出的物理块号送地址寄存器;同时,再将此页表项存入快表的一个寄存器单元中,亦即,重新修改快表。但如果联想寄存器已满,则OS必须找到一个老的且已被认为不再需要的页表项,将它换出。

4.5.3 ?访问内存的有效时间 ? ? ? ?
???????? 从进程发出指定逻辑地址的访问请求,经过地址变换,到在内存中找到对应的实际物理地址单元并取出数据,所需要花费的总时间,称为内存的有效访问时间(Effective Access Time,EAT)。假设访问一次内存的时间为t,在基本分页存储管理方式中,有效访问时间分为第一次访问内存时间(即查找页表对应的页表项所耗费的时间t)与第二次访问内存时间(即将页表项中的物理块号与页内地址拼接成实际物理地址所耗费的时间t)之和: EAT = t + t = 2t
? ? ? ? 在引入快表的分页存储管理方式中,通过快表查询,可以直接得到逻辑页所对应的物理块号,由此拼接形成实际物理地址,减少了一次内存访问,缩短了进程访问内存的有效时间。但是,由于快表的容量限制,不可能将一个进程的整个页表全部装入快表,所以在快表中查找到所需表项存在着命中率的问题。所谓命中率,是指使用快表并在其中成功查找到所需页面的表项的比率。这样,在引入快表的分页存储管理方式中,有效访问时间的计算公式即为: ? ? ? ? ? ?
?????????EAT=а×λ+(t+λ)(1—а)+t=2t+λ—t×а
????????上式中,λ表示查找快表所需要的时间,а表示命中率,t表示访问一次内存所需要的时间。
? ? ? ? 可见,引入快表后的内存有效访问时间分为查找到逻辑页对应的页表项的平均时间а × λ + (t + λ)(1 - а),以及对应实际物理地址的内存访问时间t。假设对快表的访问时间λ为20 ns(纳秒),对内存的访问时间t为100 ns,则下表中列出了不同的命中率а与有效访问时间的关系:

4.5.4 ?两级和多级页表 ?
????????? 现代的大多数计算机系统,都支持非常大的逻辑地址空间(232~264)。在这样的环境下,页表就变得非常大,要占用相当大的内存空间。 ? ?
? ? ? ? 我们可以采用下述两个方法来解决这一问题: (1) 采用离散分配方式来解决难以找到一块连续的大内存空间的问题; (2) 只将当前需要的部分页表项调入内存,其余的页表项仍驻留在磁盘上,需要时再调入。
1.两级页表(Two-Level Page Table)
????????对于要求连续的内存空间来存放页表的问题,可利用将页表进行分页,并离散地将各个页面分别存放在不同的物理块中的办法来加以解决,同样也要为离散分配的页表再建立一张页表,称为外层页表(Outer Page Table),在每个页表项中记录了页表页面的物理块号。
????????在页表的每个表项中存放的是进程的某页在内存中的物理块号, 而在外层页表的每个页表项中,所存放的是某页表分页的首址。我们可以利用外层页表和页表这两级页表,来实现从进程的逻辑地址到内存中物理地址间的变换。
????????为了方便实现地址变换,在地址变换机构中,同样需要增设一个外层页表寄存器,用于存放外层页表的始址,并利用逻辑地址中的外层页号作为外层页表的索引,从中找到指定页表分页的始址,再利用P2作为指定页表分页的索引,找到指定的页表项,其中即含有该页在内存的物理块号,用该块号P和页内地址d即可构成访问的内存物理地址。图4-18示出了两级页表时的地址变换机构。


????????2.多级页表
????????对于32位的机器,采用两级页表结构是合适的;但对于64位的机器,采用两级页表是否仍可适用的问题,须做以下简单分析。如果页面大小仍采用4 KB即212 B,那么还剩下52位,假定仍按物理块的大小(4KB=212B)来划分页表(设每一物理块号需4个Byte存储。而每一页表分页都存放在一个物理块中,因此页表分页的项数为212B/4B=210) ,则将余下的42位用于外层页号。此时在外层页表中可能有242=4096G个页表项,要占用4B*4096G=16384GB的连续内存空间。 ? ?
???????? 这样的结果显然是不能令人接受的,因此必须采用多级页表,将外层页表再进行分页,也就是将各分页离散地装入到不相邻接的物理块中,再利用第2级的外层页表来映射它们之间的关系。
?????????对于64位的计算机,如果要求它能支持264 B(= 1 844 744 TB,1TB=1KGB)规模的物理存储空间,则即使是采用三级页表结构也是难以办到的; ? ? 而在当前的实际应用中也无此必要。故在近两年推出的64位OS中,把可直接寻址的存储器空间减少为45位长度(即245)左右,这样便可利用三级页表结构来实现分页存储管理。 ? ?
???????? 如果页面大小采用8KB即213B,那么还剩下32位,假定仍按物理块的大小(8KB=213B)来划分页表(由于物理块有245B /213B=232个,因此每一物理块号需4个Byte存储。而每一页表分页都存放在一个物理块中,因此页表分页的项数最多为213B/4B=211) ,则可将剩下的32位分为三级页表:1级10位、2级11位、3级11位。
4.5.5 ?反置页表(Inverted Page Table)
???????? 1.反置页表的引入
???????? 在分页系统中,为每个进程配置了一张页表,进程逻辑地址空间中的每一页,在页表中都对应有一个页表项。在现代计算机系统中,通常允许一个进程的逻辑地址空间非常大,因此就需要有许多的页表项,而因此也会占用大量的内存空间。
????????2.地址变换
????????在利用反置页表进行地址变换时,是根据进程标识符和页号,去检索反置页表。如果检索到与之匹配的页表项,则该页表项(中)的序号i便是该页所在的物理块号,可用该块号与页内地址一起构成物理地址送内存地址寄存器。若检索了整个反置页表仍未找到匹配的页表项,则表明此页尚未装入内存。对于不具有请求调页功能的存储器管理系统,此时则表示地址出错。对于具有请求调页功能的存储器管理系统,此时应产生请求调页中断,系统将把此页调入内存。
????????
4.6 ?分段存储管理方式
????????存储管理方式随着OS的发展也在不断地发展。当OS由单道向多道发展时,存储管理方式便由单一连续分配发展为固定分区分配。
4.6.1 分段存储管理方式的引入 ? ?
????????1) 方便编程
????????通常,用户把自己的作业按照逻辑关系划分为若干个段,每个段都是从0开始编址,并有自己的名字和长度。因此,希望要访问的逻辑地址是由段名(段号)和段内偏移量(段内地址)决定的。例如,下述的两条指令便是使用段名和段内地址: LOAD 1,[A] |〈D〉; STORE 1,[B] |〈C〉; 其中,前一条指令的含义是将分段A中D单元内的值读入寄存器1;后一条指令的含义是将寄存器1的内容存入B分段的C单元中。
? ? ?2) 信息共享
????????在实现对程序和数据的共享时,是以信息的逻辑单位为基础的。比如,共享某个例程和函数。 ? ?
????????分页系统中的“页”只是存放信息的物理单位(块),并无完整的意义,不便于实现共享; ? ? 然而段却是信息的逻辑单位。 ? ?
???????? 由此可知,为了实现段的共享,希望存储管理能与用户程序分段的组织方式相适应。
????????3) 信息保护
????????信息保护同样是对信息的逻辑单位进行保护,因此,分段管理方式能更有效和方便地实现信息保护功能。
????????4) 动态增长
????????在实际应用中,往往有些段,特别是数据段,在使用过程中会不断地增长,而事先又无法确切地知道数据段会增长到多大。前述的其它几种存储管理方式,都难以应付这种动态增长的情况,而分段存储管理方式却能较好地解决这一问题。
????????5) 动态链接
????????动态链接是指在作业运行之前,并不把几个目标程序段链接起来。要运行时,先将主程序所对应的目标程序装入内存并启动运行,当运行过程中又需要调用某段时,才将该段(目标程序)调入内存并进行链接。可见,动态链接也要求以段作为管理的单位。
4.6.2 分段系统的基本原理
????????1.分段
????????在分段存储管理方式中,作业的地址空间被划分为若干个段,每个段定义了一组逻辑信息。例如,有主程序段MAIN、子程序段X、数据段D及栈段S等。 ? ?
????????每个段都有自己的名字。为了实现简单起见,通常可用一个段号来代替段名,每个段都从0开始编址,并采用一段连续的地址空间。段的长度由相应的逻辑信息组的长度决定,因而各段长度不等。整个作业的地址空间由于是分成多个段,因而是二维的,亦即,其逻辑地址由段号(段名)和段内地址所组成。
? ? ? ? 分段地址中的地址具有如下结构: ? ?
![]()
????????在该地址结构中,允许一个作业最长有64K个段,每个段的最大长度为64KB。
????????分段方式已得到许多编译程序的支持,编译程序能自动地根据源程序的情况而产生若干个段。 ? ?
????????例如,Pascal编译程序可以为全局变量、用于存储相应参数及返回地址的过程调用栈、每个过程或函数的代码部分、每个过程或函数的局部变量等等,分别建立各自的段。类似地,Fortran编译程序可以为公共块(Common block)建立单独的段,也可以为数组分配一个单独的段。装入程序将装入所有这些段,并为每个段赋予一个段号。
????????在前面所介绍的动态分区分配方式中,系统为整个进程分配一个连续的内存空间。而在分段式存储管理系统中,则是为每个分段分配一个连续的分区,而进程中的各个段可以离散地移入内存中不同的分区中。 ? ?
????????为使程序能正常运行,亦即,能从物理内存中找出每个逻辑段所对应的位置,应像分页系统那样,在系统中为每个进程建立一张段映射表,简称“段表”。 ? ?
????????每个段在表中占有一个表项,其中记录了该段在内存中的起始地址(又称为“基址”)和段的长度。段表可以存放在一组寄存器中,这样有利于提高地址转换速度,但更常见的是将段表放在内存中。
2.段表 ? ? ? ?
????????在分段式存储管理系统中,为每个分段分配一个连续的分区,而进程中的每个段可以离散地移入内存中不同的分区中,像分页系统一样,在系统中为每个进程建立一张映射表,称为“段表”。
????????

3.地址变换机构
????????为了实现从进程的逻辑地址到物理地址的变换功能,在系统中设置了段表寄存器,用于存放段表始址和段表长度TL。 ? ?
????????在进行地址变换时,系统将逻辑地址中的段号S与段表长度TL进行比较。若S>TL,表示段号太大,是访问越界,于是产生越界中断信号;若未越界,则根据段表的始址和该段的段号,计算出该段对应段表项的位置,从中读出该段在内存的起始地址, 然后,再检查段内地址d是否超过该段的段长SL。若超过,即d>SL,同样发出越界中断信号;若未越界,则将该段的基址d与段内地址相加,即可得到要访问的内存物理地址。?
?4.分页和分段的主要区别
????????由上所述不难看出,分页和分段系统有许多相似之处。比如,两者都采用离散分配方式,且都要通过地址映射机构来实现地址变换。但在概念上两者完全不同,主要表现在下述三个方面。
????????(1) 页是信息的物理单位,分页是为实现离散分配方式,以消减内存的外零头,提高内存的利用率。或者说,分页仅仅是由于系统管理的需要而不是用户的需要。 段则是信息的逻辑单位,它含有一组其意义相对完整的信息。分段的目的是为了能更好地满足用户的需要。?
????????(2) 页的大小固定且由系统决定,由系统把逻辑地址划分为页号和页内地址两部分,是由机器硬件实现的,因而在系统中只能有一种大小的页面;而段的长度却不固定,决定于用户所编写的程序,通常由编译程序在对源程序进行编译时,根据信息的性质来划分。
???????? (3) 分页的作业地址空间是一维的,即单一的线性地址空间,程序员只需利用一个记忆符,即可表示一个地址;而分段的作业地址空间则是二维的,程序员在标识一个地址时,既需给出段名,又需给出段内地址。
?4.6.3 信息共享
????????分段系统的一个突出优点,是易于实现段的共享,即允许若干个进程共享一个或多个分段,且对段的保护也十分简单易行。在分页系统中,虽然也能实现程序和数据的共享,但远不如分段系统来得方便。
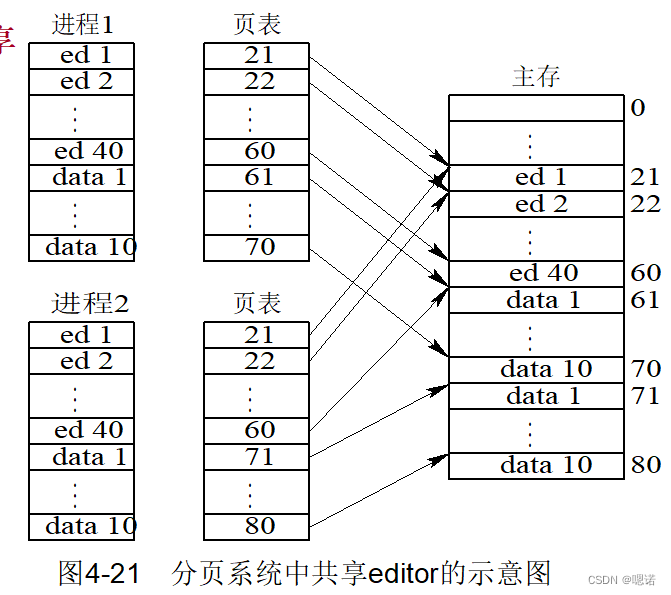
????????1.分页系统中对程序和数据的共享 ? ?
????????我们通过一个例子来说明这个问题。例如,有一个多用户系统,可同时接纳40个用户,他们都执行一个文本编辑程序(Text Editor)。如果文本编辑程序有160KB的代码和另外40KB的数据区,则总共需有8MB的内存空间来支持40个用户。如果160 KB的代码是可重入的(Reentrant),则无论是在分页系统还是在分段系统中,该代码都能被共享,在内存中只需保留一份文本编辑程序的副本,此时所需的内存空间仅为1760KB(40×40+160),而不是8000 KB。假定每个页面的大小为4 KB,那么,160 KB的代码将占用40个页面,数据区占10个页面。为实现代码的共享,应在每个进程的页表中都建立40个页表项,它们的物理块号都是21#~60#。在每个进程的页表中,还须为自己的数据区建立页表项,它们的物理块号分别是61#~70#、71#~80#、81#~90#,…,等等。
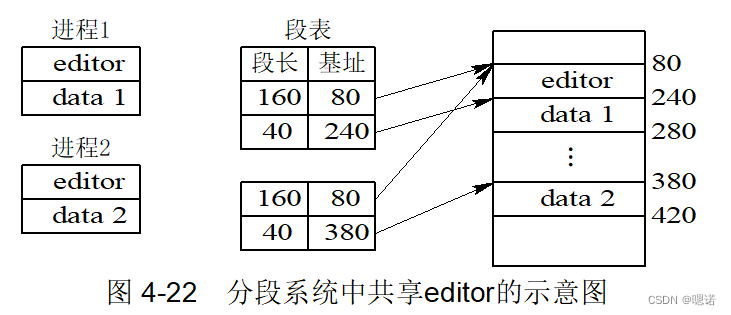
2.分段系统中对程序和数据的共享 ? ? ? ?
????????在分段系统中,由于是以段为基本单位的,不管该段有多大,我们都只需为该段设置一个段表项,因此使实现共享变得非常容易。我们仍以共享editor为例,此时只需在(每个)进程1和进程2的段表中,为文本编辑程序设置一个段表项,让段表项中的基址(80)指向editor程序在内存的起始地址。图4-22是分段系统中共享editor的示意图。?
? ? ? ? 可重入代码(Reentrant Code)又称为“纯代码”(Pure Code),是一种允许多个进程同时访问的代码。为使各个进程所执行的代码完全相同,绝对不允许可重入代码在执行中有任何改变。因此,可重入代码是一种不允许任何进程对它进行修改的代码。 ?
????????但事实上,大多数代码在执行时都可能有些改变,例如,用于控制程序执行次数的变量以及指针、信号量及数组等。为此,在每个进程中,都必须配以局部数据区,把在执行中可能改变的部分拷贝到该数据区,这样,程序在执行时,只需对该数据区(属于该进程私有)中的内容进行修改,并不去改变共享的代码,这时的可共享代码即成为可重入码。
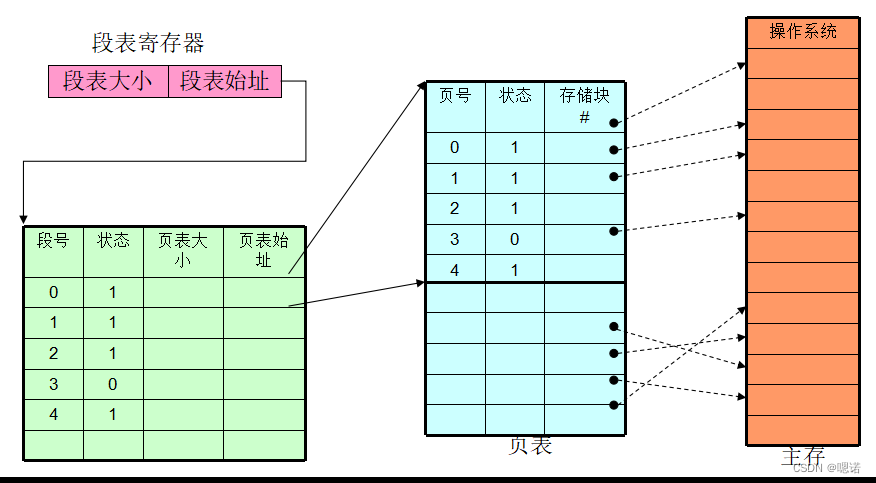
4.6.4 段页式存储管理方式
???????? 1.基本原理
????????段页式系统的基本原理,是分段和分页原理的结合,即先将用户程序分成若干个段,再把每个段分成若干个页,并为每一个段赋予一个段名。 ? ?
???????? 图4-23示出了一个作业地址空间的结构。该作业有三个段,页面大小为4 KB。在段页式系统中,其地址结构由段号、段内页号及页内地址三部分所组成,如图4-24所示。

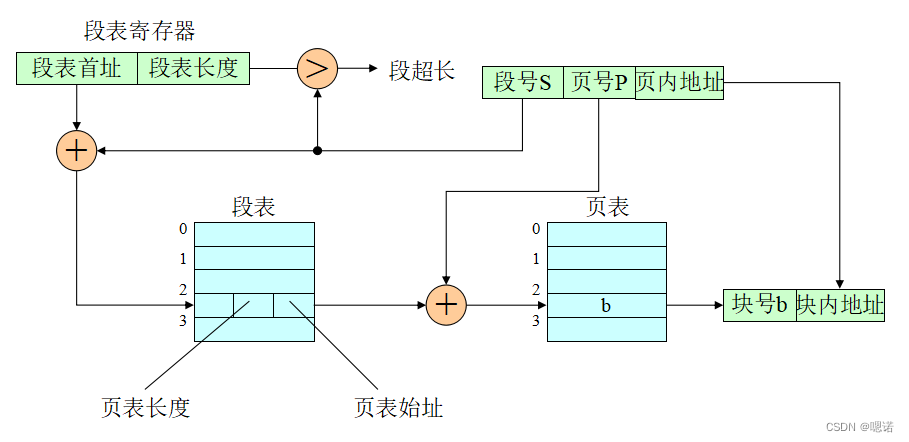
2.地址变换过程
????????在段页式系统中,为了便于实现地址变换,须配置一个段表寄存器,其中存放段表始址和段表长TL。 ? ?
????????进行地址变换时,首先利用段号S,将它与段表长TL进行比较。若S<TL,表示未越界,于是利用段表始址和段号来求出该段所对应的段表项在段表中的位置,从中得到该段的页表始址,并利用逻辑地址中的段内页号P来获得对应页的页表项位置,从中读出该页所在的物理块号b,再利用块号b和页内地址来构成物理地址。
???????? 在段页式系统中,为了获得一条指令或数据,须三次访问内存。 第一次访问是访问内存中的段表,从中取得页表始址; 第二次访问是访问内存中的页表,从中取出该页所在的物理块号,并将该块号与页内地址一起形成指令或数据的物理地址; 第三次访问才是真正从第二次访问所得的地址中,取出指令或数据。 显然,这使访问内存的次数增加了近两倍。为了提高执行速度,在地址变换机构中增设一个高速缓冲寄存器。每次访问它时,都须同时利用段号和页号去检索高速缓存,若找到匹配的表项,便可从中得到相应页的物理块号,用来与页内地址一起形成物理地址;若未找到匹配表项,则仍须再三次访问内存。?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 分布式训练与主流并行范式
- 如何配置Kafka账号密码
- 记uniapp总动态:style无法用带参数的computed属性问题
- 【TOP】OA巨头出版社, 3个月录用,国人友好!
- 炸弹人游戏
- 【EI会议征稿通知】第六届生物技术与生物医学国际学术会议(ICBB 2024)
- 【德特森】电动截止阀打不开的故障原因有哪些?
- 第八章 8.1 建设工程纠纷主要种类和法律解决途径 8.2民事诉讼制度 8.3 仲裁制度 8.4 调解、和解制度与争议评审 8.5 行政复议和行政诉讼
- 什么猫粮比较好?主食冻干猫粮品牌如何选择?
- 2023年度总结:技术沉淀、持续学习