实时仿真四路鱼眼实现2D环视效果
发布时间:2024年01月24日
##序言:先展示下效果,随后有空总结下原理和具体代码
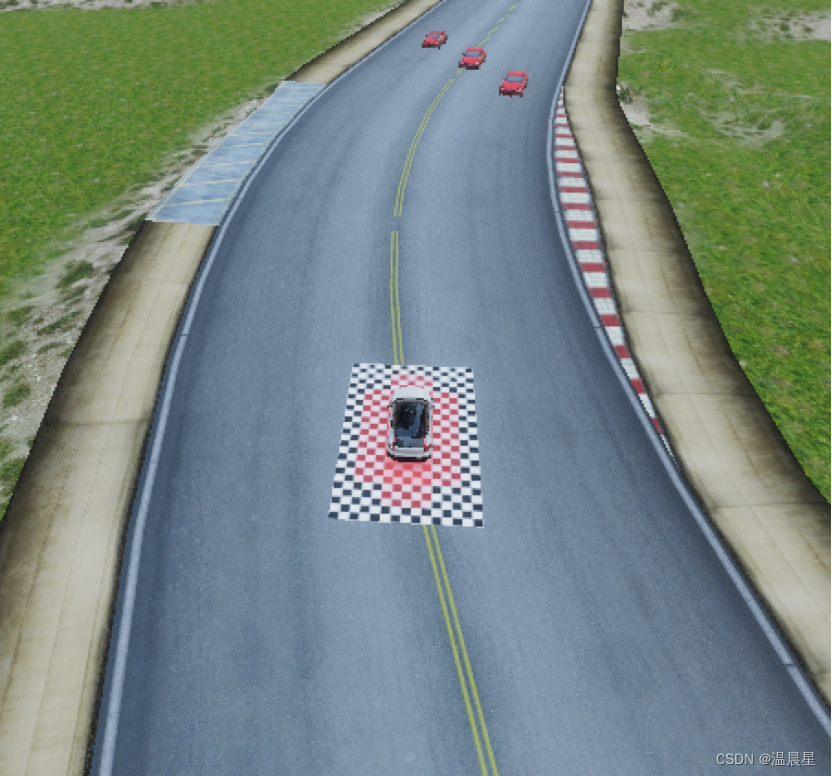
1:用渲染引擎搭建虚拟场景
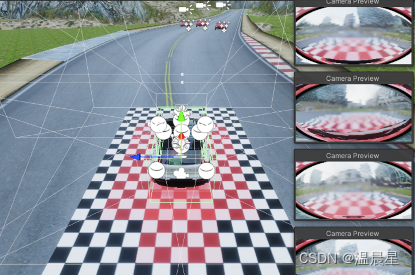
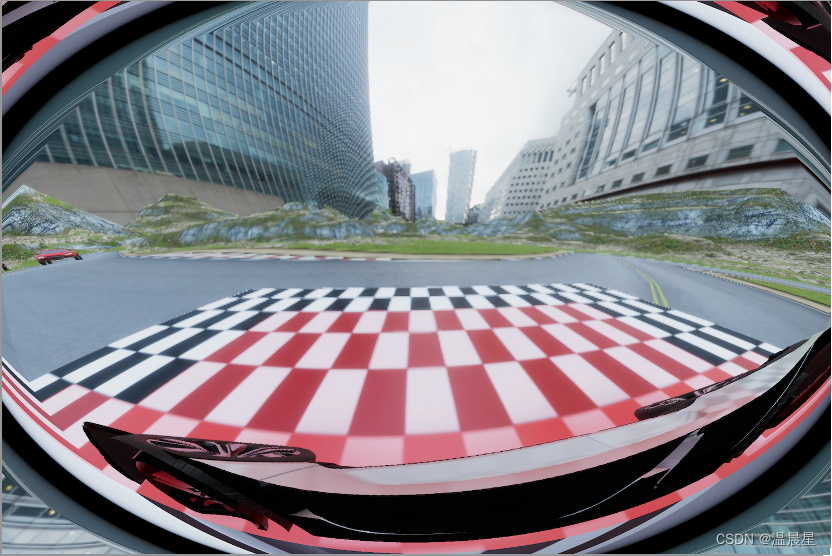
2:模拟四路鱼眼
鱼眼焦距:小于16
鱼眼视距:大于120
鱼眼相机优势:显示范围广,矫正后的特征更明显
3:标定求内参:
相机矩阵:包括焦距(fx,fy),光学中心(Cx,Cy),完全取决于相机本身,是相机的固有属性,只需要计算一次,可用矩阵表示如下:[fx, s, Cx; 0, fy, Cy; 0,0,1];
畸变系数:
camera_matrix: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 229.18796013, 0., 959.2765099, 0.,
217.59214502, 639.42341529, 0., 0., 1. ]
dist_coeffs: !!opencv-matrix
rows: 4
cols: 1
dt: d
data: [ 0.2998425,0.08655333,
0.04872814,0.00092806 ]
4:输出四路鱼眼



5:标定求外参
在这里插入代码片 data: [ -2.0513926287326148e-01, -1.1003402373393436e+00,
7.9193175454376649e+02, -4.5403326443024684e-03,
-1.1312860190554999e+00, 6.8991568409882564e+02,
-1.0596555001414414e-05, -1.8332755853986058e-03, 1. ]
6:矫正融合效果
cv::Mat map1, map2;
cv::fisheye::initUndistortRectifyMap(prms.camera_matrix, prms.dist_coff, cv::Mat(), new_camera_matrix, prms.size , CV_16SC2, map1, map2);
cv::remap(src, dst, map1, map2, cv::INTER_LINEAR, cv::BORDER_CONSTANT);
cv::warpPerspective(src, src, prm.project_matrix, project_shapes[prm.name]);

文章来源:https://blog.csdn.net/weixin_39244242/article/details/135747263
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 关于24年信息系统项目管理师论文如何提升?
- 进程调度算法
- LeetCode 每日一题 Day 24(Hard) ||dp动态规划
- mybatis注意事项/异常
- SpringBoot 应用篇之从 0 到 1 实现一个自定义 Bean 注册器
- Channel 使用事项和注意细节
- AttributeError: ‘ImageDraw‘ object has no attribute ‘textsize‘
- 算法复杂度分析
- [分章:代码知识]python Mysql操作
- 深度学习|5.2 偏差和方差