超维空间M1无人机使用说明书——01、ROS机载电脑使用说明——远程连接
发布时间:2024年01月07日
引言:远程连接通常采用两种方式,一种是通过可视化软件,如VNC、Nomachine等,另外一种是使用SSH。各有优缺点,两种远程登录方式的优缺点做一个简单的对比:
1、SSH优缺点
优点:1、消耗网络资源 2、运行稳定
缺点:1、图形化界面卡顿 2、对新手不友好
2、可视化软件优缺点
优点:1、对新手友好 2、运图形化界面比ssh流畅
缺点:1、消耗网络资源
基于以上考虑,我们默认都是采用SSH远程连接的方式进行控制
一、远程登录到无人机端的Jetson nano
步骤一、通过SSH 登录到ROS主控端
无人机上电后会默认发布wifi,ssh前,需要先确保已经连接了wifi。
名称:cwkj_xxx
密码:12345678

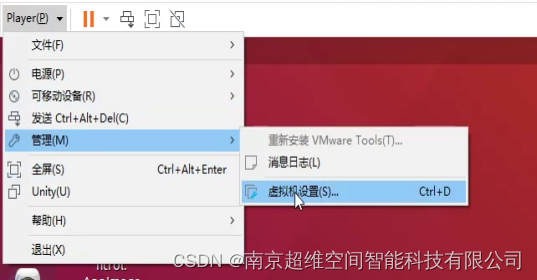
步骤二、在虚拟机上使用SSH之前,需要确保虚拟机设置成了桥接模式,选择管理->虚拟机设置
(如果是安装的ubuntu系统,则不需要设置桥接模式)
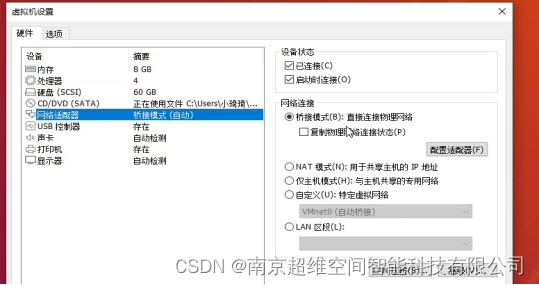
步骤三、在弹出的页面选择桥接模式,然后确定后重新虚拟机即可。
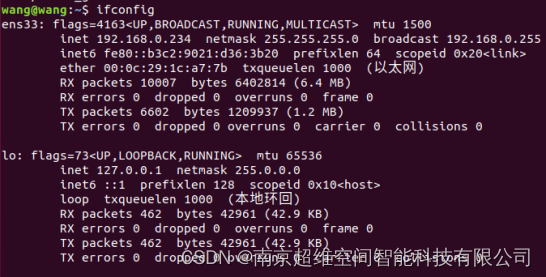
步骤四、确认是否处于同一个网段中,使用ifconfig:
无人机默认IP地址192.168.0.100。确保虚拟机和无人机处于同一个网段:192.168.0.XXX,如下图:192.168.0.234
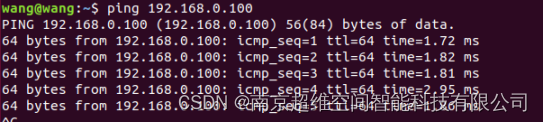
步骤五、可以通过ping 192.168.0.100再次确认通信畅通
步骤六、输入远程登录指令 ssh -Y cwkj@192.168.0.100
这里-Y 的目的是远程运行图形应用,同时方便使用gedit编辑器进行代码的修改。如果不需要运行图形应用也可以不加-Y。在ssh远程登录时候,需要输入密码验证,密码:111
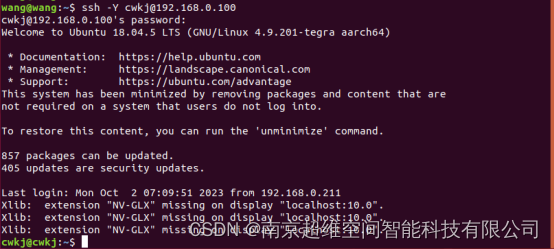
登录前:终端的用户名为wang@wang,表示当前处于虚拟机端。
登录后:终端用户名变为 cwkj@cwkj,表示当前处于无人机的Jetson nano端。
需要注意的是,我们的程序运行都是在无人机端进行,因此需要确定我们在登陆到了无人机端,及ssh到cwkj@cwkj下再进行相关文件的启动才能启动无人机的对应功能。如下:

二、设置主从通信:在虚拟机端查看话题等
步骤一、打开.bashrc文件:gedit .bashrc

步骤二、在打开的文件最下方添加指向主机的IP地址和虚拟机自身的IP地址,关闭终端重新打开即可

步骤三、使用rostopic list即可查看已经启动的话题,同时也表示主从式分布通信设置完成。
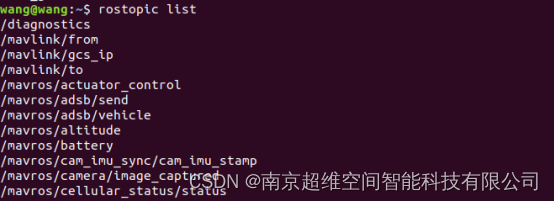
注:对于无人机端的Jetson nano的操作都是ssh过去进行。
文章来源:https://blog.csdn.net/qq_35598561/article/details/135437630
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!