电动夹爪可用TMC方案推荐
电动夹爪是一种机械手臂的末端工具,它是由电机、减速器、传动系统和夹爪组成的。电动夹爪可以通过电动控制实现夹持和松开物品的动作。在现代工业生产中,电动夹爪广泛应用于自动化生产线和机器人等领域,可以实现高效、快速、准确的物料夹取和放置操作,提高了生产效率和质量。
一、伺服电动夹爪的原理
伺服电动夹爪是一种采用电机作为动力源的机电一体化产品,其基本原理是利用电机的旋转力矩带动机械部件实现夹取和松开工件的操作。伺服电动夹爪通常由电机、减速器、传感器、控制器和夹爪本体等组成。其中,电机负责提供动力,传感器用于监测夹爪的位置、速度和力度等参数,控制器根据传感器的反馈信号和预设的控制算法控制电机的转速和转向,从而实现对夹爪的运动控制。
二、伺服电动夹爪的控制方法*
1、位置控制
伺服电动夹爪的位置控制是指控制夹爪在特定的位置上停止或运动。位置控制可以通过闭环控制方式实现,即利用传感器监测夹爪的位置信息,与目标位置进行比较,计算出误差,并根据误差调整控制信号以驱动电机实现精确的位置控制。
2、速度控制伺服电动夹爪的速度控制是指控制夹爪的运动速度。速度控制可以通过闭环或开环控制方式实现。闭环控制方式通常采用速度反馈传感器进行监测,从而实现对电机转速的精确控制。开环控制方式则通过预设控制信号驱动电机实现控制。
3、力控制伺服电动夹爪的力控制是指控制夹爪的夹持力度。力控制可以通过闭环或开环控制方式实现。闭环控制方式通常采用力传感器进行监测,从而实现对夹爪的夹持力度的精确控制。开环控制方式则通过预设控制信号驱动电机实现控制。
三、应用场景
1、自动化生产线: 电动夹爪可以实现物料的夹取、放置和转移等操作,大大提高了生产效率和质量。
2、机器人: 电动夹爪可以用来夹取和放置物品,实现机器人的自动化操作。
3、物流仓储: 电动夹爪可以用来夹取货物,将其放置在指定位置上,实现货物的自动化存储和搬运。
4、医疗器械: 电动夹爪可以用来夹取手术器械,将其放置在手术部位上,实现手术的自动化操作。
四、Trinamic 方案推荐
TMC4361A-LA 是一款步进电机全闭环步进伺服控制器,实现电流环、速度环、位置环的全闭环工作,带有 S 形斜坡发生器,可以任意一点加减速,防止电机启停时发生过冲现象。 此外,TMC4361 采用 Trinamic DcStep,闭环控制和 ChopSync术。 该芯片的工作电压为 3.3V 或 5V。 TMC4361 提供 SPI 控制器和 SPI,S / D驱动器接口。 此外,它还具有 ABZ 增量式、SPI 和 SSI 绝对值编码器接口。
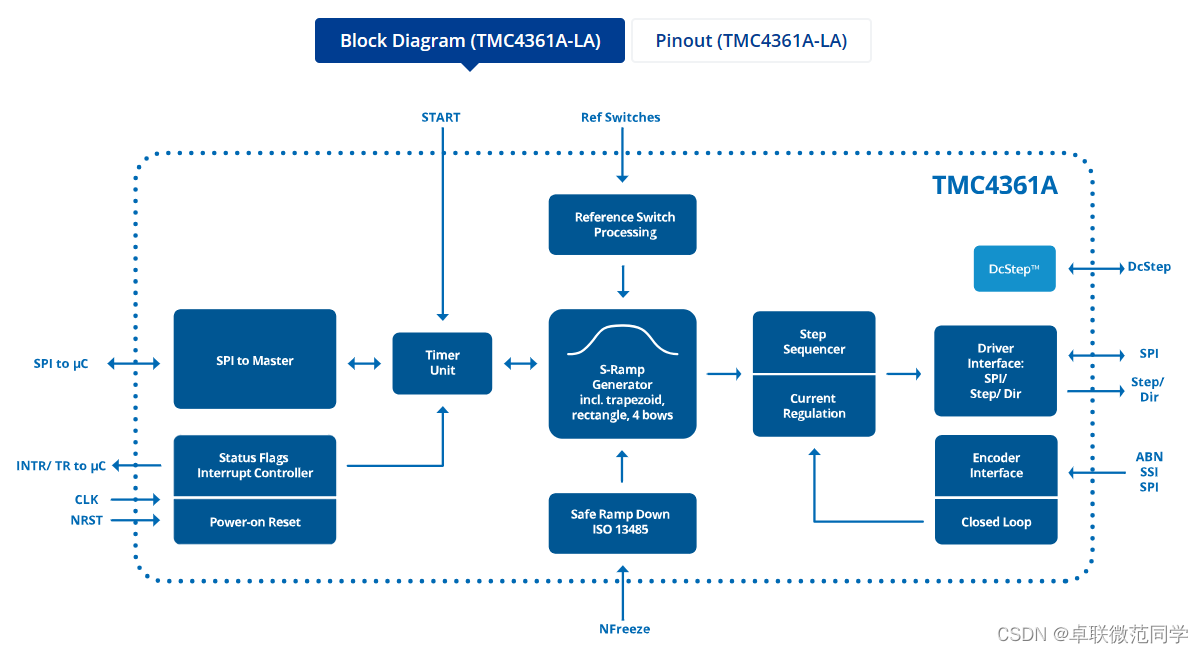
TMC4361 可搭配的驱动芯片 TMC2240ATJ+、TMC2130-TA、TMC2160A-TA。
TMC2240ATJ+:工作电压:4.5-36V,工作电流:2.1A,峰值电流 3A,内置 MOS。
TMC2130-TA:工作电压:4.75-46V,工作电流:1.4A,峰值电流 2.5A,内置 MOS。
TMC2160A-TA:工作电压:8-60V,工作电流:最大 20A,外置 MOS。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 少儿编程 中国电子学会图形化编程2022年9月等级考试Scratch二级真题解析(选择题、判断题)
- 【css】渐变效果
- CSMM和CMMI之间有什么区别?
- 灵活配置 Spring 集合:List、Set、Map、Properties 详解
- 开源轻量级分布式文件系统FastDFS本地部署并实现远程访问服务器
- 云卷云舒:AI for DB、DB for AI
- Spring的事件发布/订阅机制在电商的使用
- Vue2:利用watch和localStorage存储数据案例
- 【分布式微服务专题】从单体到分布式(四、SpringCloud整合Sentinel)
- python第5天之Python中的文件操作基础