ArduPilot开源代码之CompanionComputer上天计划
发布时间:2024年01月20日
ArduPilot开源代码之CompanionComputer上天计划
1. 源由
在开源代码的熏陶下,在经济蒸蒸日上的大环境下,找不到工作,搞个伴机电脑上天,实现(航模+遥控+眼镜+地面站+RTSP视频流)空地一体四轴航模飞行器。
现在到处管控的是飞行器,那就算是DIY,妥妥的DIY航模飞行器。木有序列号,但是我们也能在天上浪~~~
2. 上天计划
上天计划分成若干部分考虑:
- 机械结构
- 电子硬件
- 系统软件
上述内容整合起来,缺少一些打印件,后续整理出配套的打印件构思。
2.1 机械结构
经过最初的F450机架,集成FPV功能,最后减震更换到Mark4 5寸机,四轴自此开始逐步稳定下来。
2.2 电子硬件
必须都是妥妥的航模和电子爱好者硬件:
- 飞控:Aocoda-RC H743Dual
- 电调:HSKRC LAN-BLS-45A, J_H_30_REV16_7, 无电流,无电调回传;更新bluejay固件
- FPV摄像头:Foxeer Micro Toothless 2 FOV Switchable FPV StarLight Camera 1/2" Sensor Super HDR
- 模拟图传:PandaRC VT5804M L1 (Buzzer/Mic/IRC Protocol) 5.8G
- 遥控接收机:ELRS915MHz接收机
- 遥控发射机:ELRS915MHz发射机
- 遥控器:TX12 Mark II Radio Controller
- 图像接收机:Foxeer Wildfire 5.8GHz 72CH Dual Receiver
- 眼镜:Fatshark FPV Goggles
- GPS:BN880
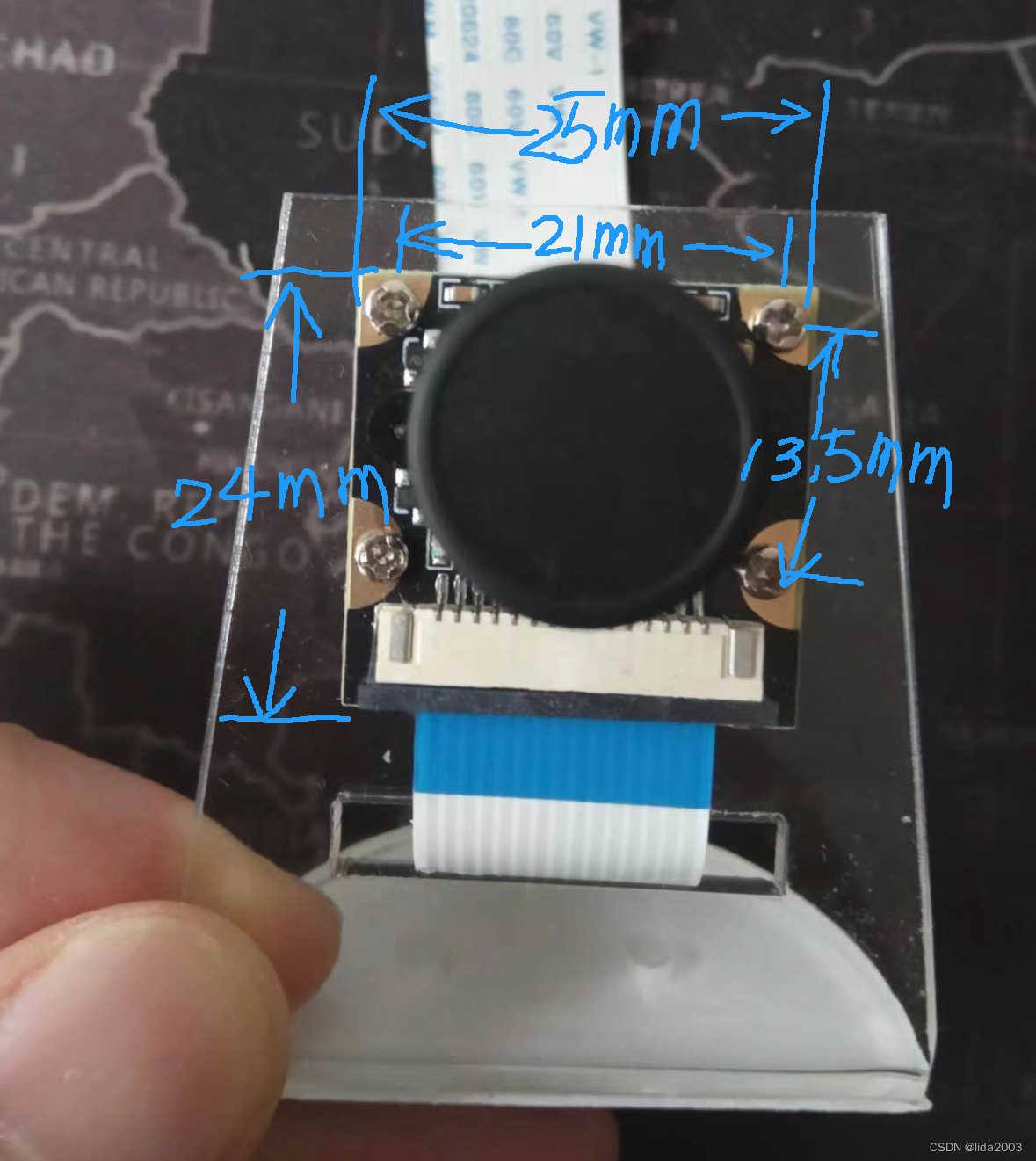
- 高清摄像头:Raspberry Pi OV5647
- 伴机电脑:Raspberry Pi 3B+
- 地面站:Redmi Note 5A
- 动力电池:3S Lipo Battery 11.1 V 2200MAH 30C
- 机载UPS:Li-ion Battery HAT for Raspberry Pi
2.3 系统软件
- 飞控固件:Ardupilot
- 接收机/发射机固件:ELRS
- 遥控软件:OpenTx
- 伴机电脑软件:Rpanion
- 地面站软件:QGroundControl
3. 整合构想
理想很丰满,现实很骨感!!!
上图上图,没图都是瞎说,不过只能表达下意思,大家理解~~~
- 大致是将树莓派+OV5647摄像头背着;电源就独立供电(大约能持续30分钟)了。
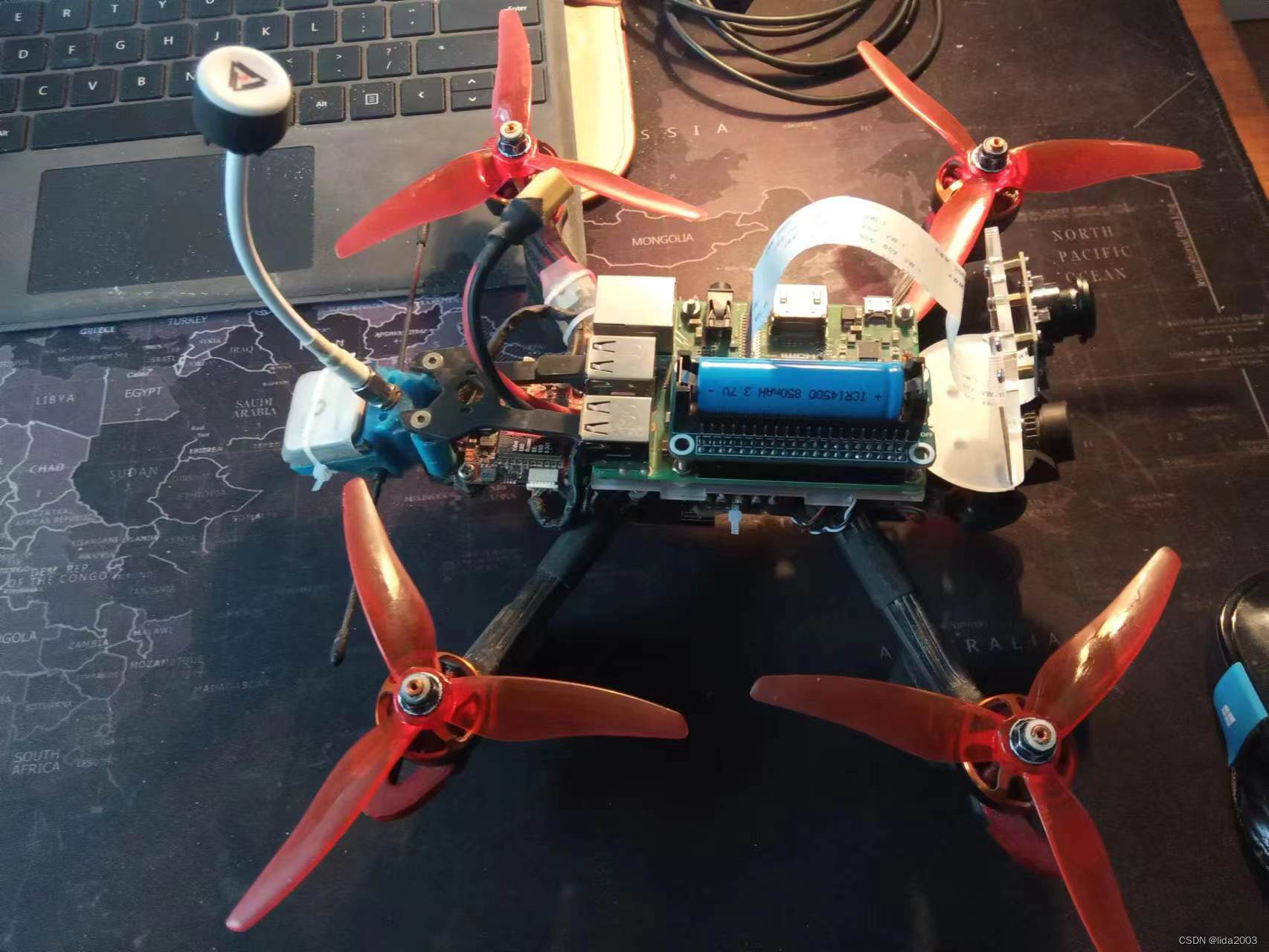
- 实际效果应该能有QGC连接,并提供RTSP视频流高清图像。

4. 打印件
上述整合方法需要通过3D打印件解决几个问题:
- 电池需要放在飞机下方,以便腾出位置给树莓派;
- 树莓派支架在飞机上方,基线平面需要与原有飞机碳板留出2mm高度,以防打到桨叶;
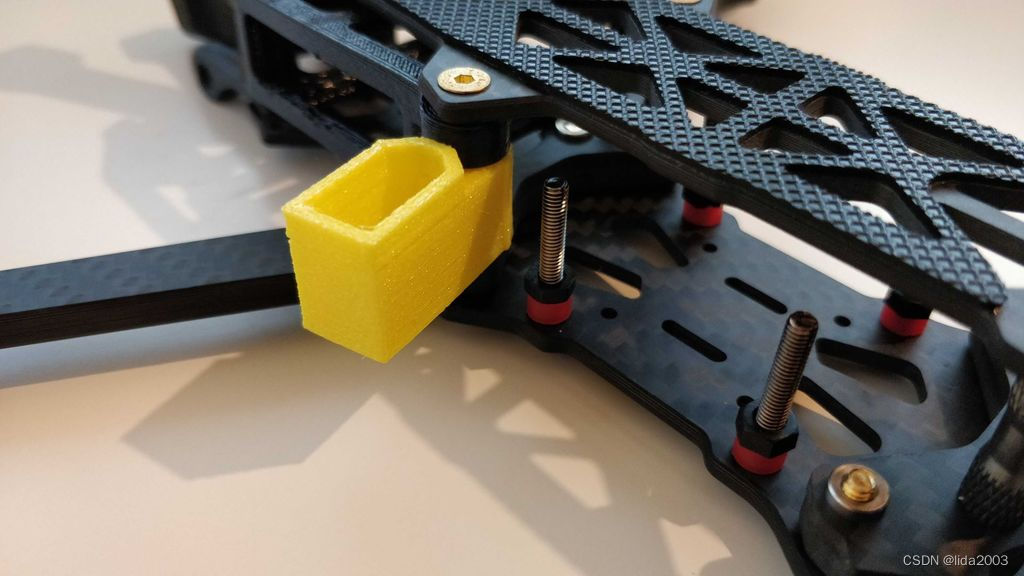
- 【打印件】XT60插头固定件,方便下方电池插接;
- 【打印件】树莓派支架固定在Mark机架上,支持GoPro支架;
- 【打印件】摄像头固定打印结构,然后安装在GoPro支架上;
- 整体垫高3mm是比较好的策略,但是需要考虑固定到Mark4机架上的螺丝下沉1mm;


4.1 XT60支架
注:Mark4有不同的变种机架,请考虑不同变种机架的兼容性。
参考资料:GEPRC Mark4 XT60 connector holder
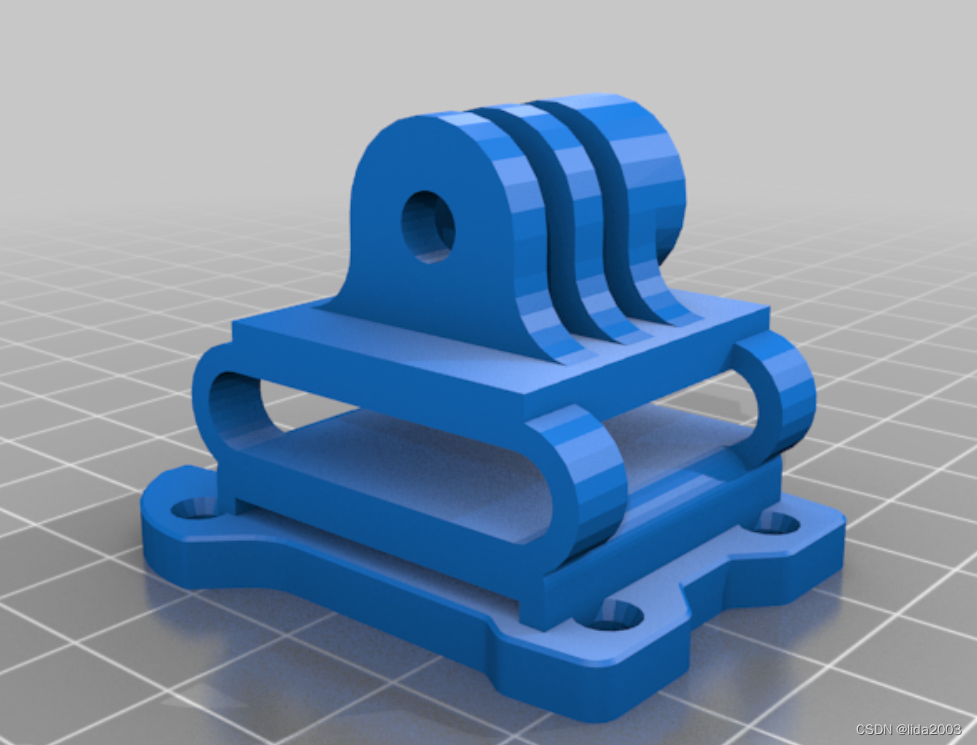
4.2 树莓派支架
- 采用6颗Mark4原装螺丝固定;
- 紧贴碳板部分需要垫高3mm厚度,避免桨叶与支架的碰撞;
- 支架采用镂空方式减重(不破坏结构强度);
- 树莓派采用M2螺丝+螺母方式固定,需四个M2螺丝的孔位;
- 前部GoPro支架保留,配合后续摄像头固定;
- GoPro锁定螺丝M5,螺母六边形,边到边7mm;


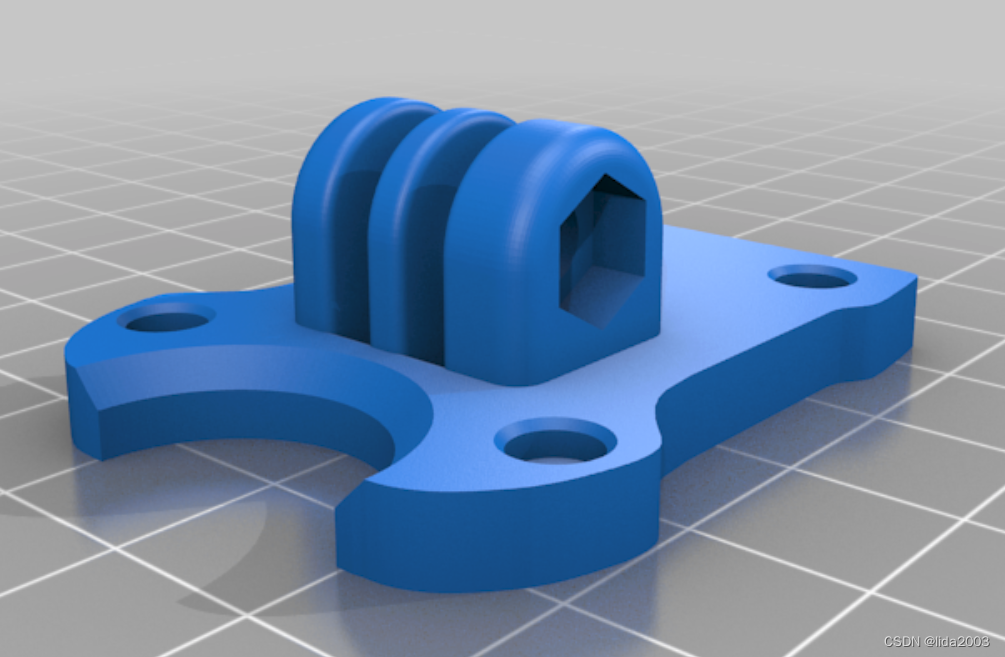
4.3 摄像头支架
- 支架底部采用GoPro方式固定,可调角度;
- 摄像头固定螺丝M1;
- 支架上可以开两个孔方便后续FPC串口;

5. 参考资料
【1】四轴飞控DIY简明步骤介绍
【2】四轴飞控DIY集成FPV功能
【3】四轴飞控DIY Mark4 - 减震
【4】ArduPilot开源飞控系统之简单介绍
【5】ArduPilot开源飞控之Companion Computers简单分析
文章来源:https://blog.csdn.net/lida2003/article/details/135712180
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- openwrt使用docker部署adguard home
- 安科瑞AIM-D100-ES光伏储能系统直流绝缘监测仪——安科瑞赵嘉敏
- 2023江苏职教高考计算机技能考试--填空题解析
- Python——欢迎来到吱昂张游乐园
- 用freesurfer对扩散指标(FA,MD)进行VBA分析(基于体素的分析)-dt_recon
- 【Navicat redis】navicat 连接redis,又一大神器
- Qt 连接 Mysql
- Exception类(异常)- Thread类 (线程、多线程)- Timer类(定时器)
- web前端(第一天作业)
- 数字经济的不断发展,数字化转型已成为各行各业不可避免的趋势