四阶轨迹规划,高精度电机运动控制必备
发布时间:2023年12月29日
最近开始接触百纳米级别的控制精度,为了达到这一精度,必须使用高阶的轨迹规划。
四阶轨迹规划的作用是把一个阶跃信号变为一个四阶连续信号。
例如一个电机,想让它从a点移动到b点,那么给出的参考信号在位置,速度,加速度和加加速度上都是连续的,只有加加加速度是非连续的。
我一开始有疑问,为什么要考虑到加加速度(jerk)和加加加速度(Djerk)呢?毕竟电机的加速度一般只和电流有关。
这是因为电机的电流也需要响应时间,而jerk对应的即是电机驱动器中的电流环带宽,也就是电流上升速度。
根据电流环带宽,电机力矩,电机最大负载,电机最大速度,以及移动距离,就可以计算出这样一个四阶连续信号。
具体怎么做呢?
在电机从a点移动到b点的过程中,需要经历加速和减速两个阶段,加速度则是先正后负,一路往下分解,到了Djerk这一层,总共可以分解出16次Djerk值发生变化,也就是16个时间节点,这16个时间节点的长度是固定比例的。
通过规定要运动的距离,就可以一路往下迭代计算出16个时间节点,具体运算还是比较复杂的,计算量也比较大。
假如要抵达规定速度,也可以只迭代8个时间节点,以此类推。
这通过这种算法,就可以让执行器完全地跟踪参考信号,而且还有个好处就是可以很方便地进行速度,加速度,加加速度的前馈补偿。
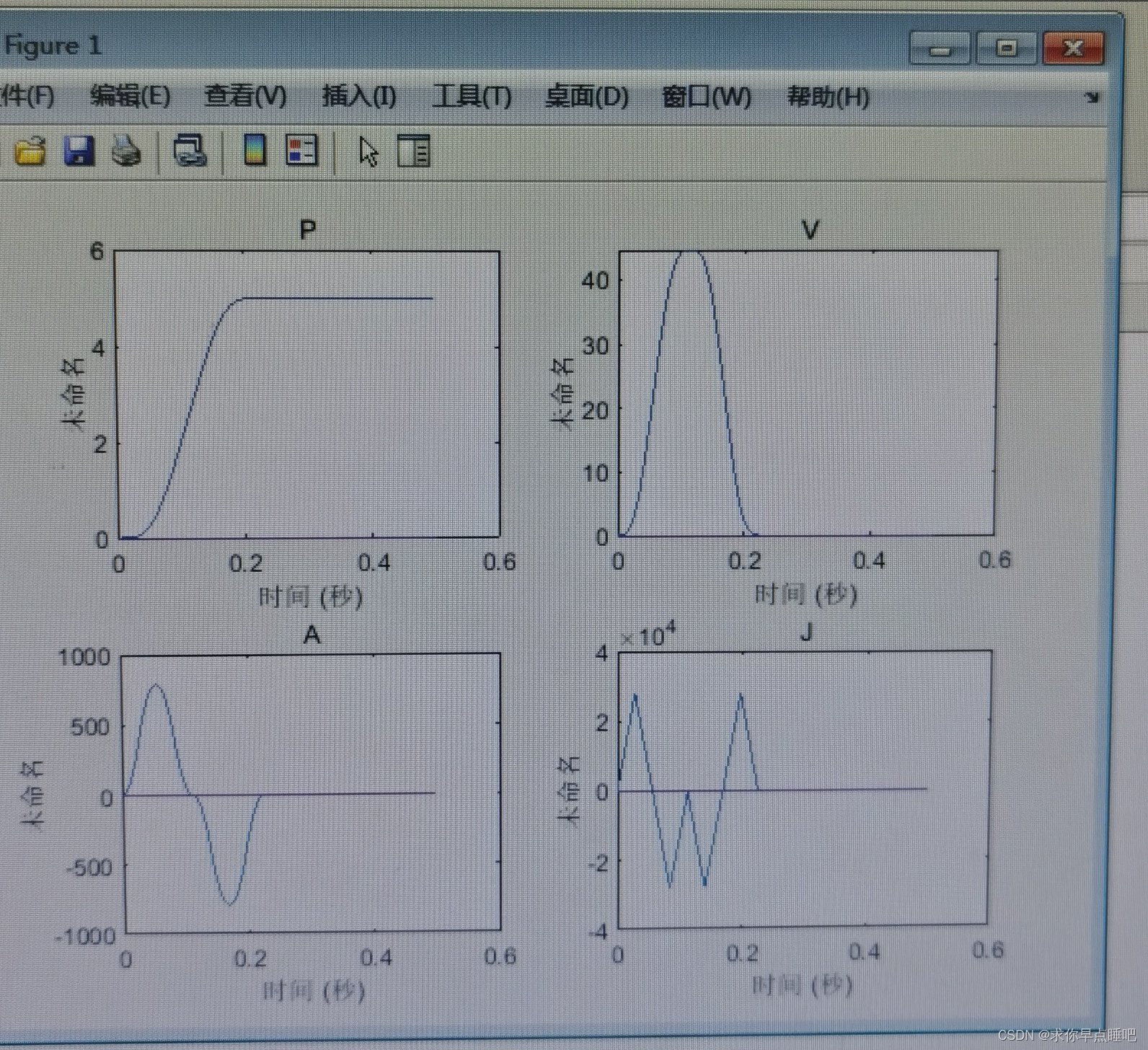
matlab仿真结果如下:
文章来源:https://blog.csdn.net/Bes1Python/article/details/135291671
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 常用中间件漏洞
- xcode-开发相关
- 浅谈IDC数据中心机房低压配电系统的组成与设计
- Linux基础第二章:目录和文件内容管理
- 【Delphi】最新版12中新功能:Skia4Delphi
- 个人如何在微信平台上开发小游戏?
- 【Mybatis】我抄袭了Mybatis,手写一套MyMybatis框架:编写MyMybatis框架
- HCIA-Datacom题库(自己整理分类的)——OSPF协议多选
- 将yolov8的检测框从正框修改为旋转框需要做那些修改?
- 什么是数据结构?数据结构的基本概念