高级分布式系统-第12讲 分布式控制经典理论
发布时间:2024年01月14日
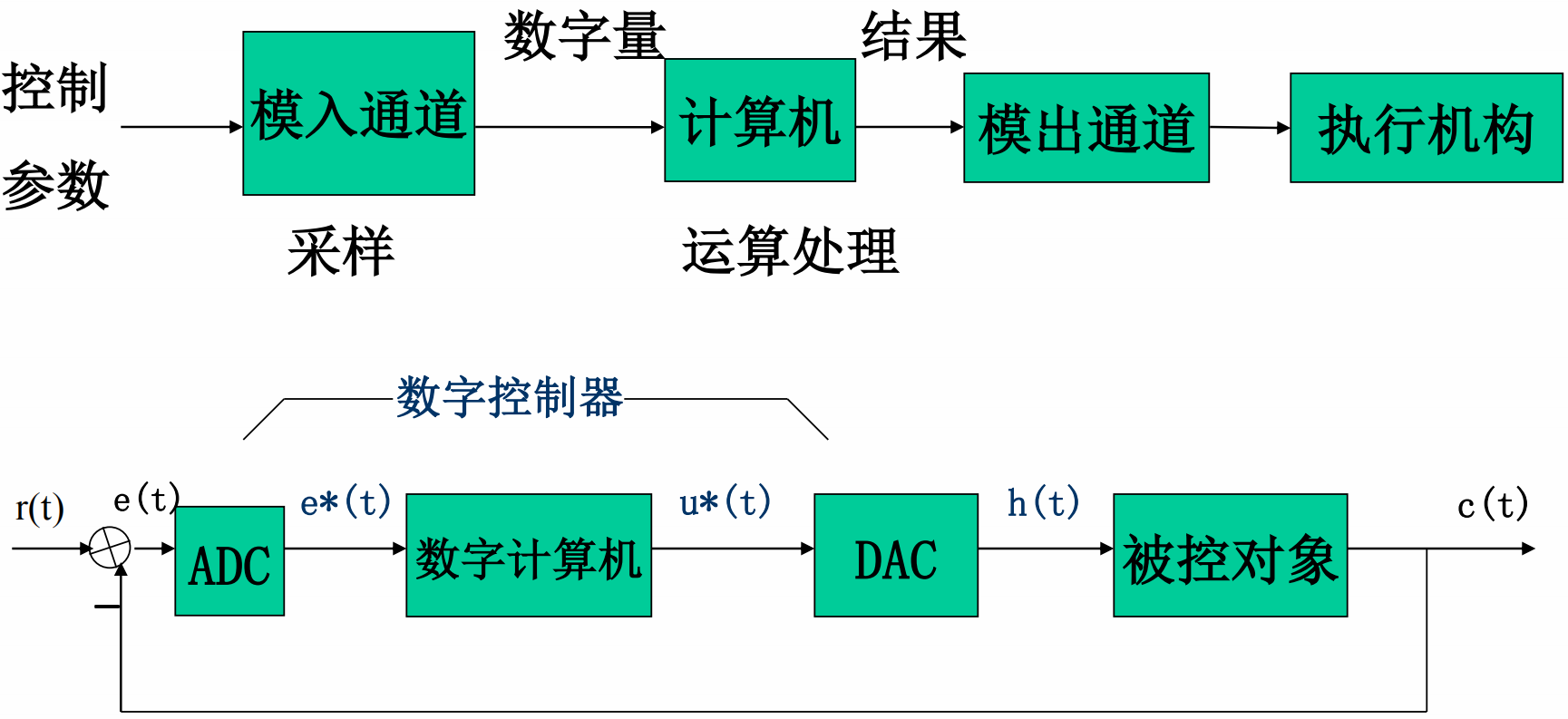
控制器基础
分布式控制系统的设计,是指在给定系统性能指标的条件下,设计出控制器的控制规律和相应的数字控制算法。

PID控制器
根据偏差的比例(Proportional)、积分(Integral)、微分(Derivative)进行控制(简称PID控制),一种广泛应用于压力、温度、流量、液位等工业控制系统中的控制规律。
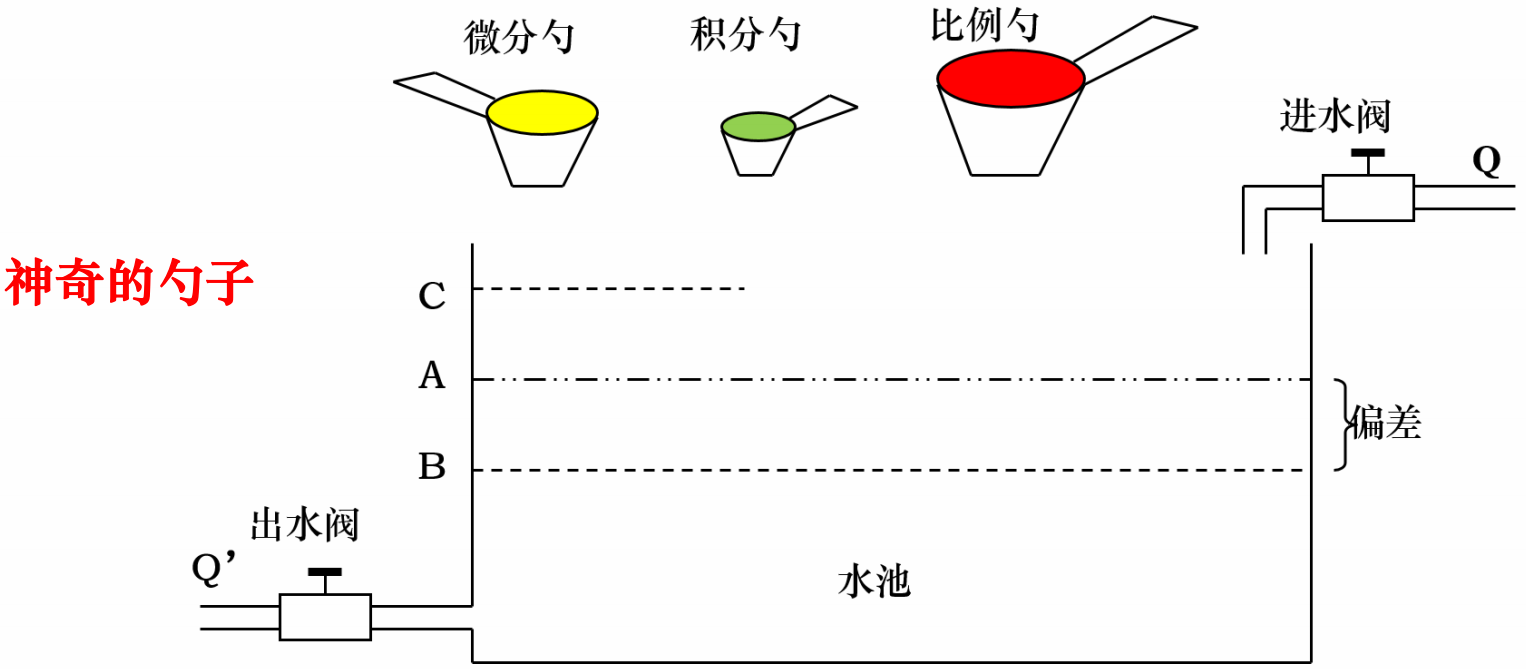
PID调节的实质:根据输入的偏差信号,按比例、积分、微分的函数关系进行计算,其运算结果用于输出控制。
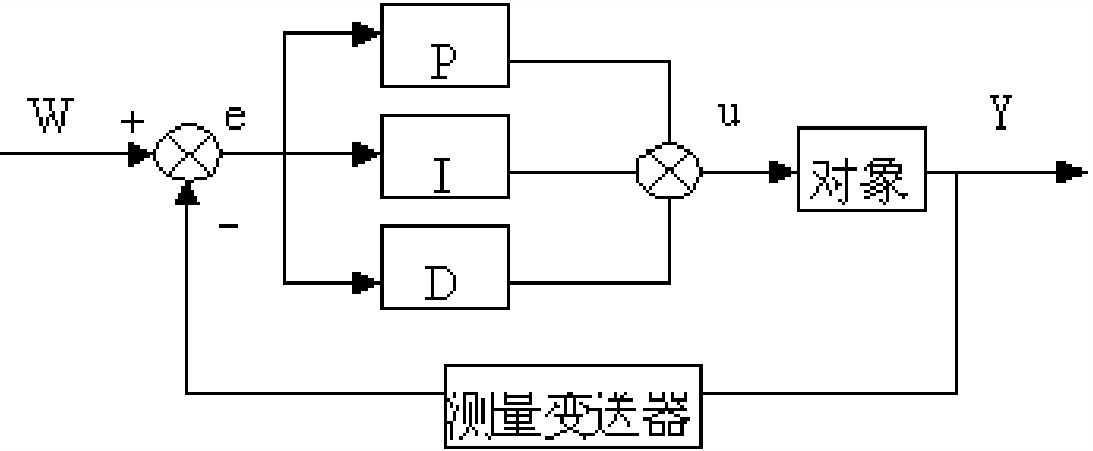
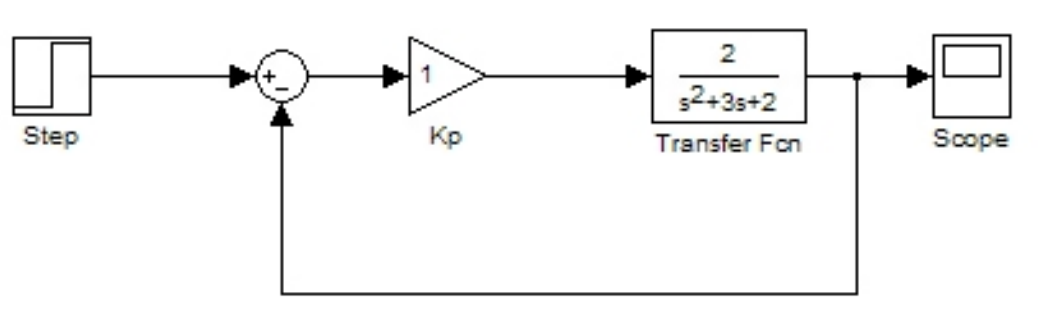
PID控制器把给定值W与实际输出值Y相减,得到控制偏差e,偏差e经比例、积分、微分运算后,通过线性组合构成控制量u,然后用u对对象进行控制。
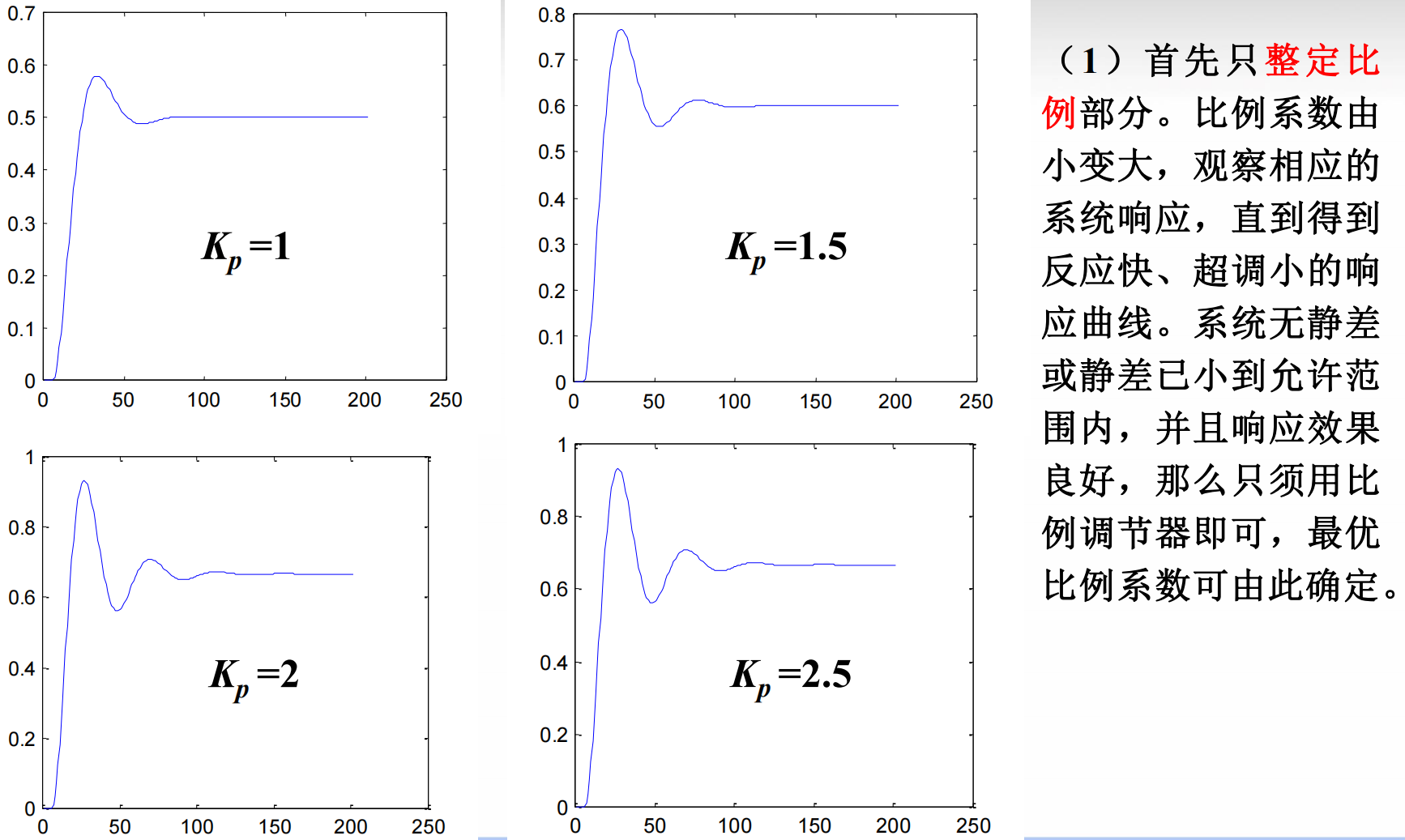
1) 比例调节器
控制规律为:
:比例系数,
:控制常量,即误差为零时的控制变量。
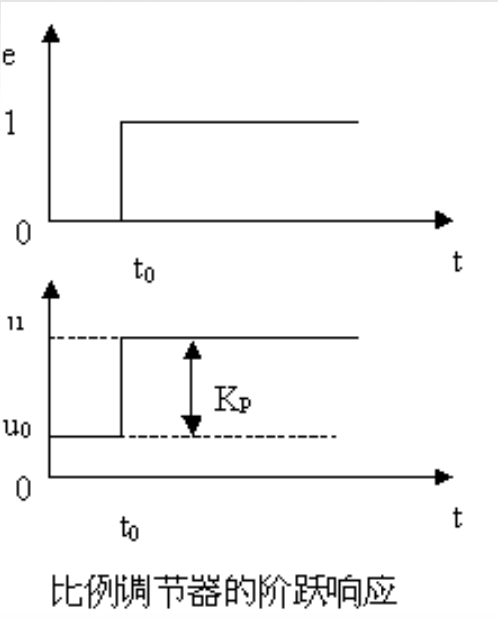
优点:反应快。
缺点:不能完全消除静差。
问题:对于有些控制对象,比例调节器会存在静差(残存的误差),加大比例系数可以减小静差,但当
过大时,会使动态质量变差,导致系统不稳定。

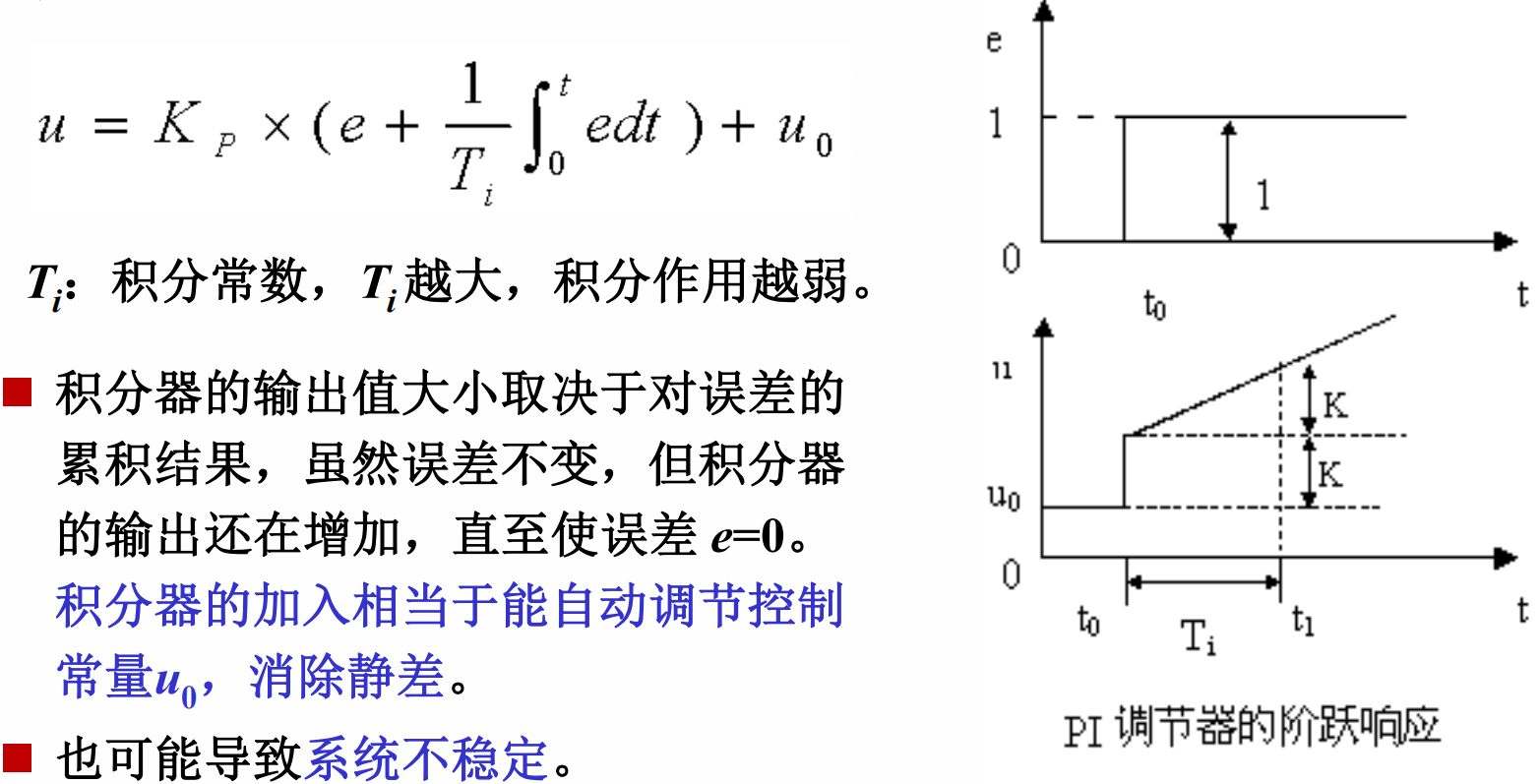
2) 比例-积分调节器
3) 比例-积分-微分调节器
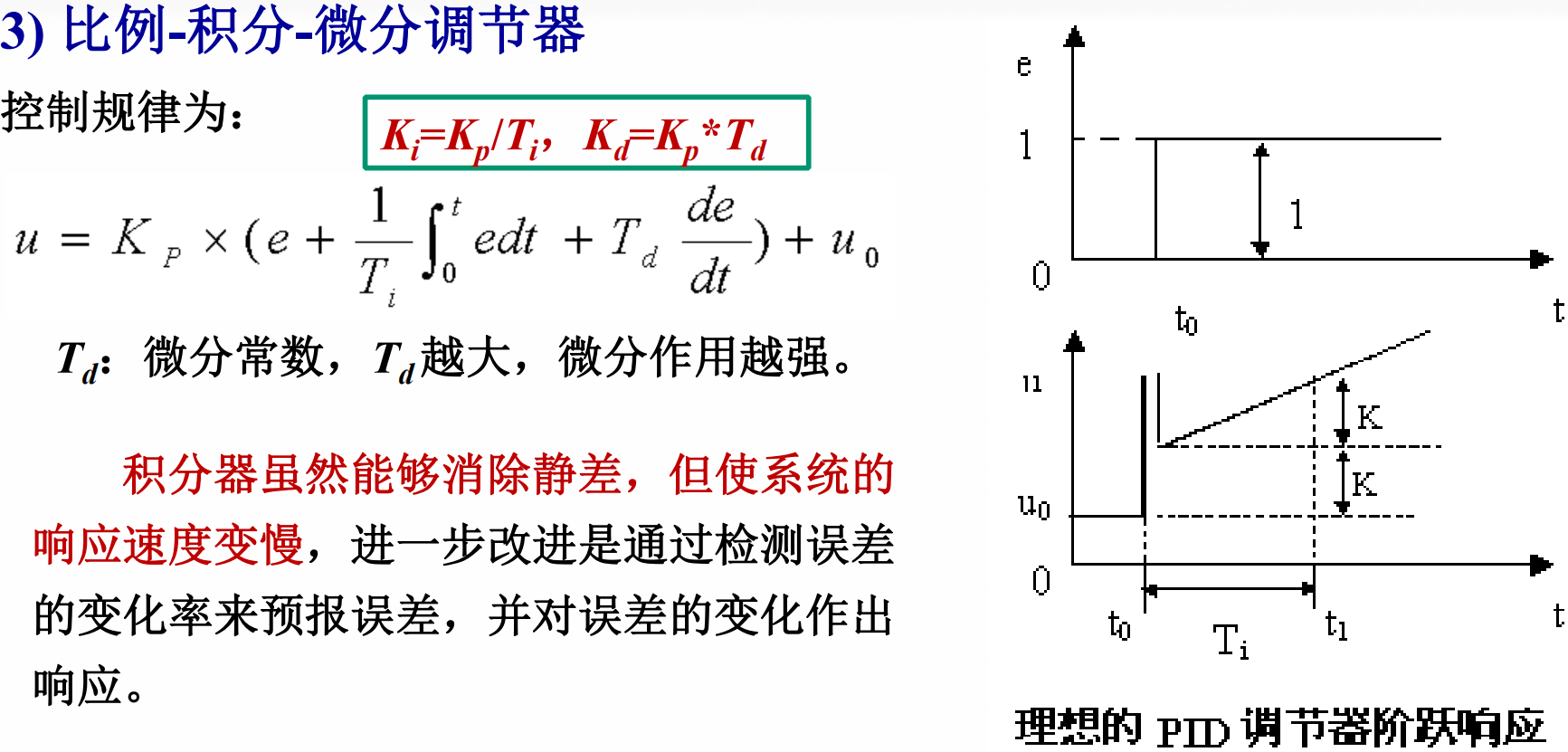

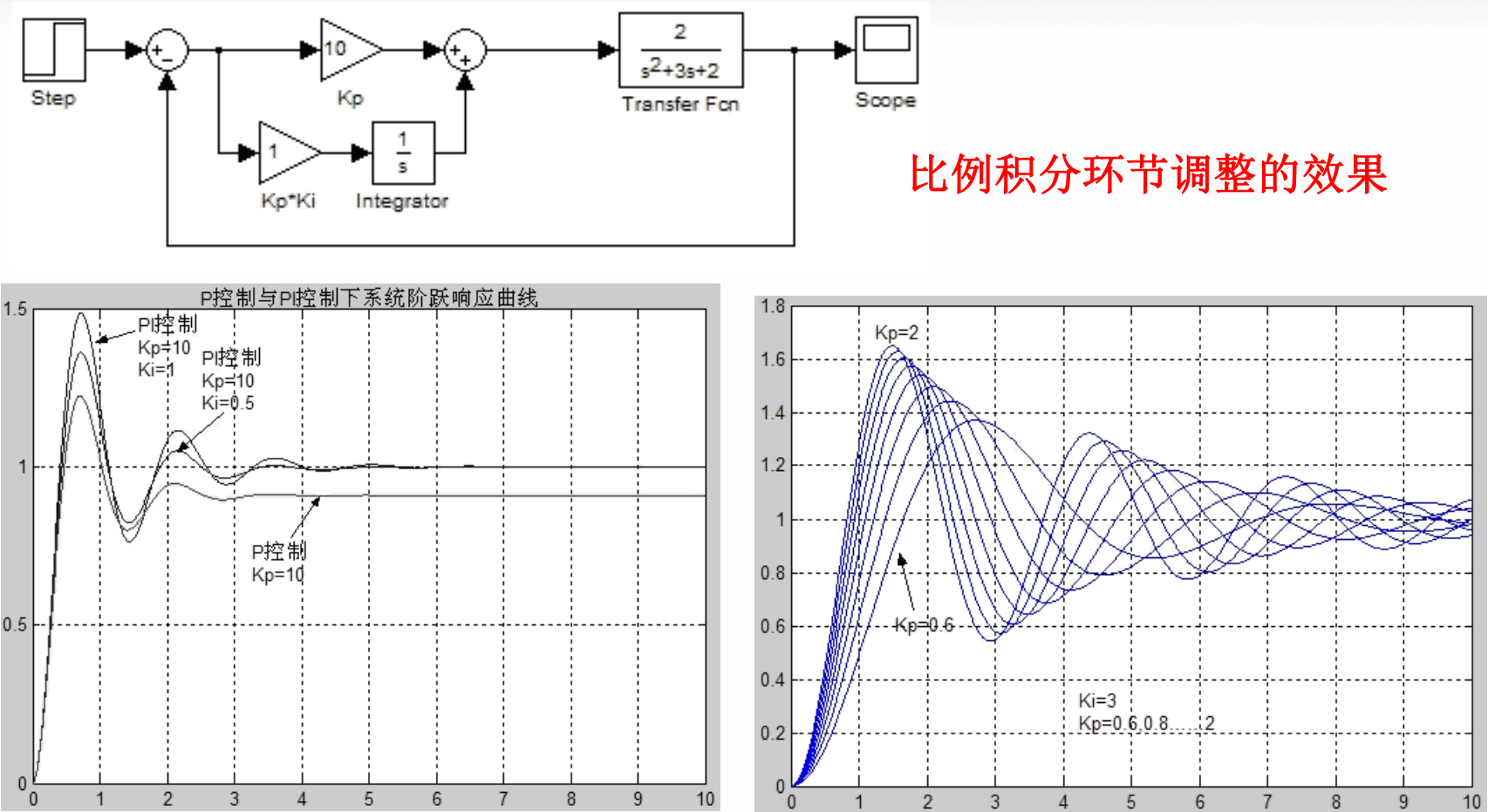
比例积分微分环节调整的效果

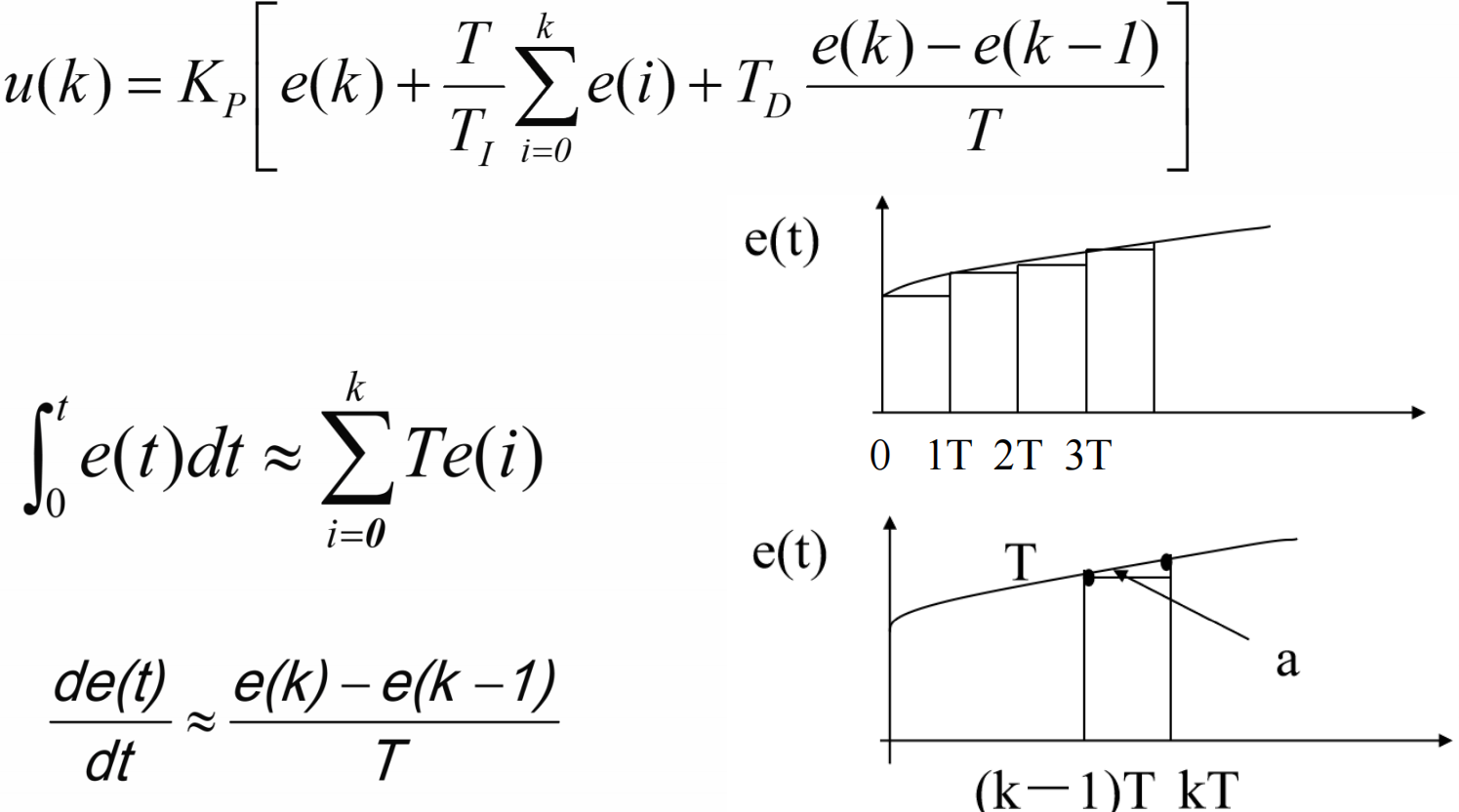
1) 数字PID位置型控制算法
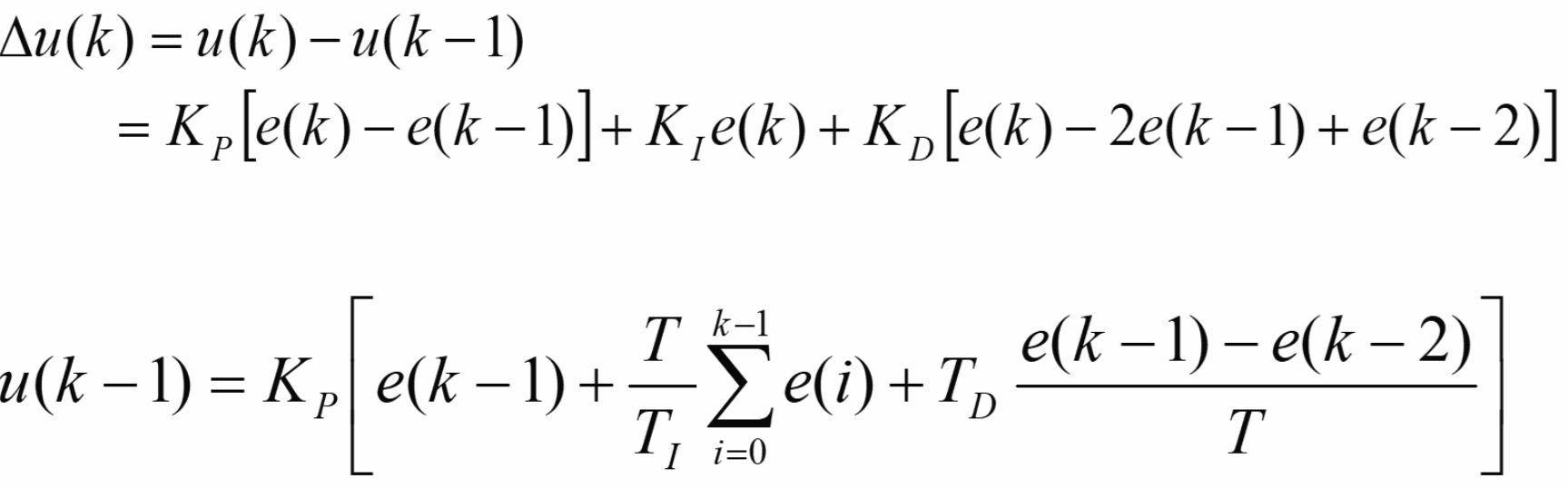
2) 数字PID增量型控制算法

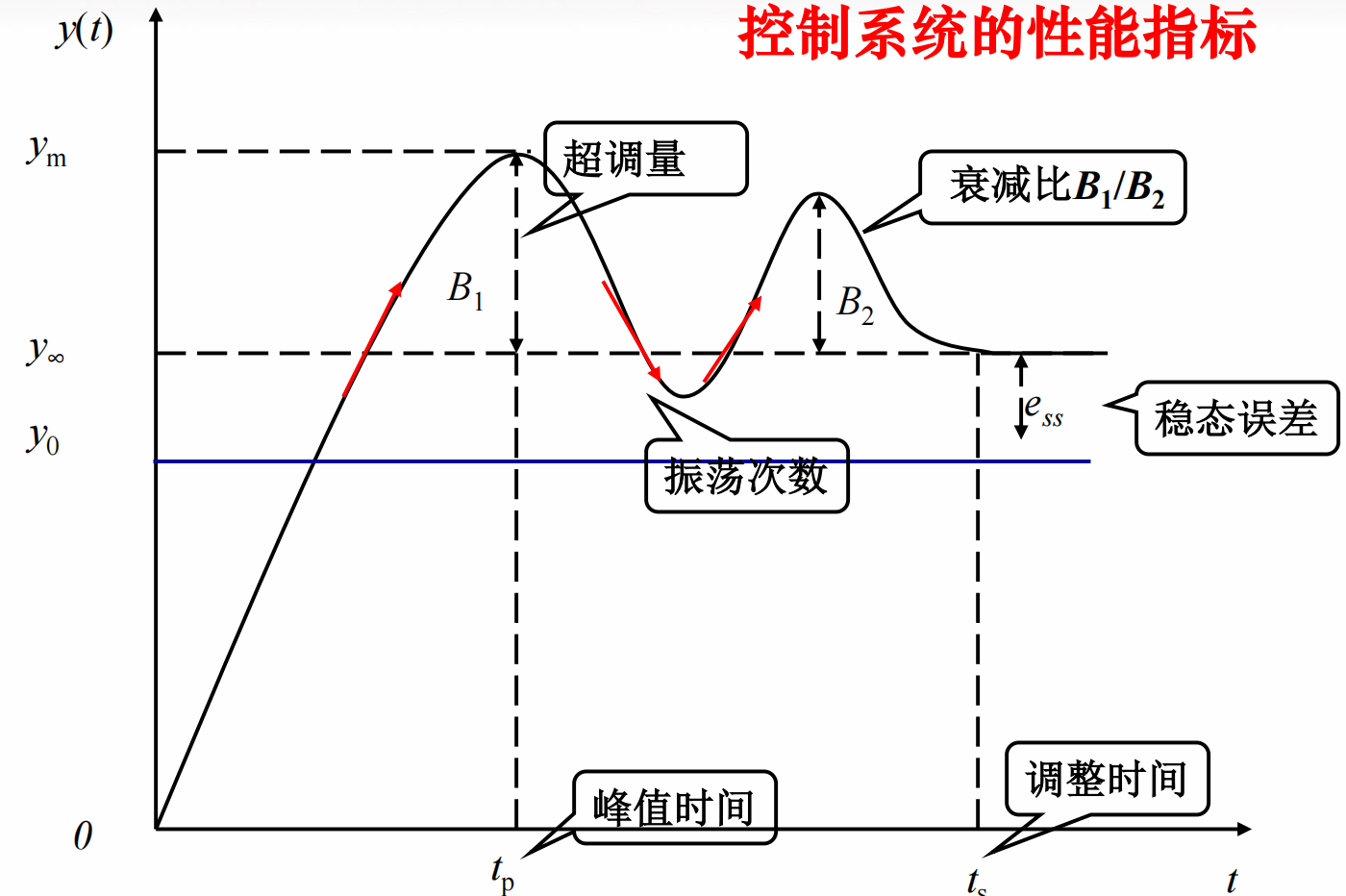
参数调节
PID数字调节器的主要参数有比例系数、积分时间
、微分时间
以及采样周期T,如何正确选择PID调节器的结构和它的参数,使系统受到扰动后,仍将保持稳定,不致产生破坏性的振荡,并将误差保持在最小,是PID设计的重要问题。
在控制系统中,产生误差的扰动有以下几种类型:
1. 设定值的变化;
2. 供给源的变化;
3. 要求的变化;
4. 环境的变化;
5. 测量元件性能的变化
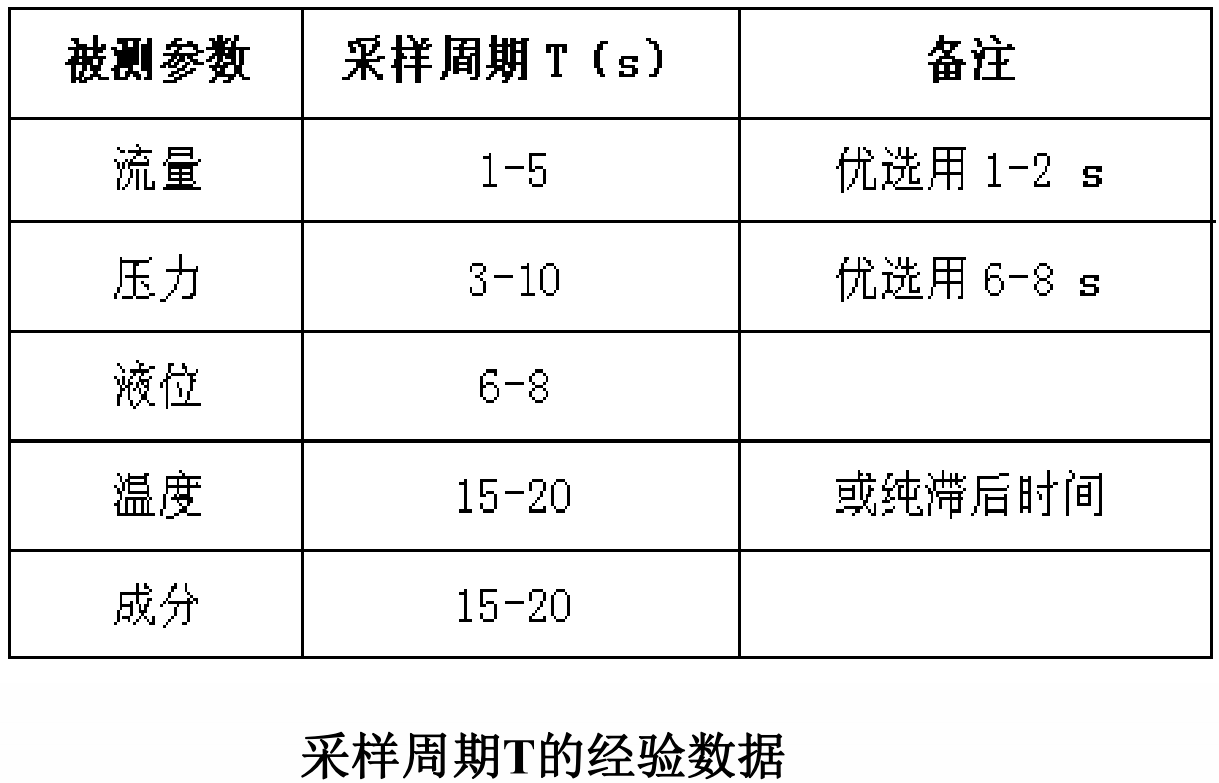
采样周期的选择


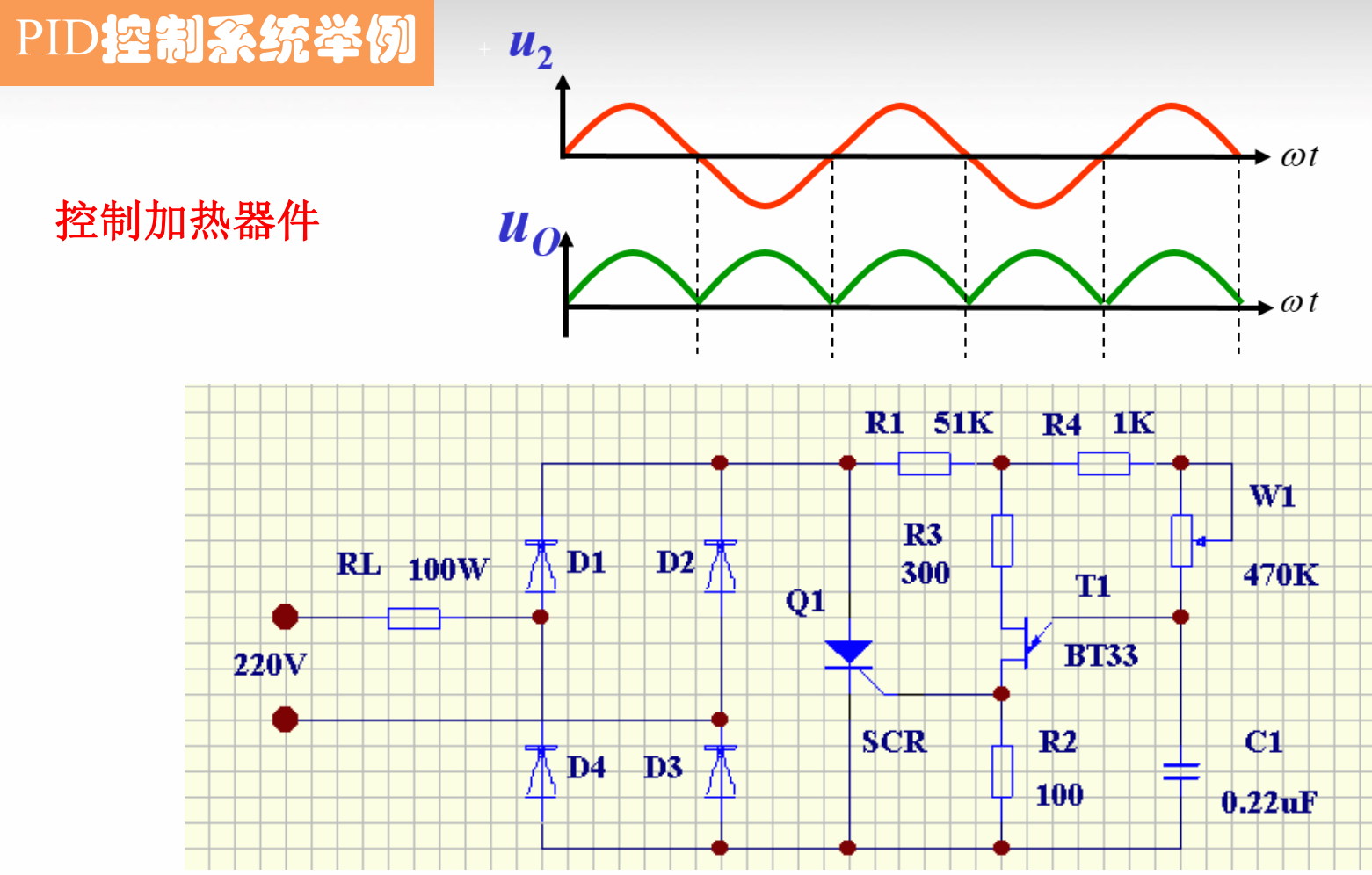
PID控制系统举例

文章来源:https://blog.csdn.net/weixin_50917576/article/details/135588932
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!