西门子【PLC】
发布时间:2024年01月03日
1200:
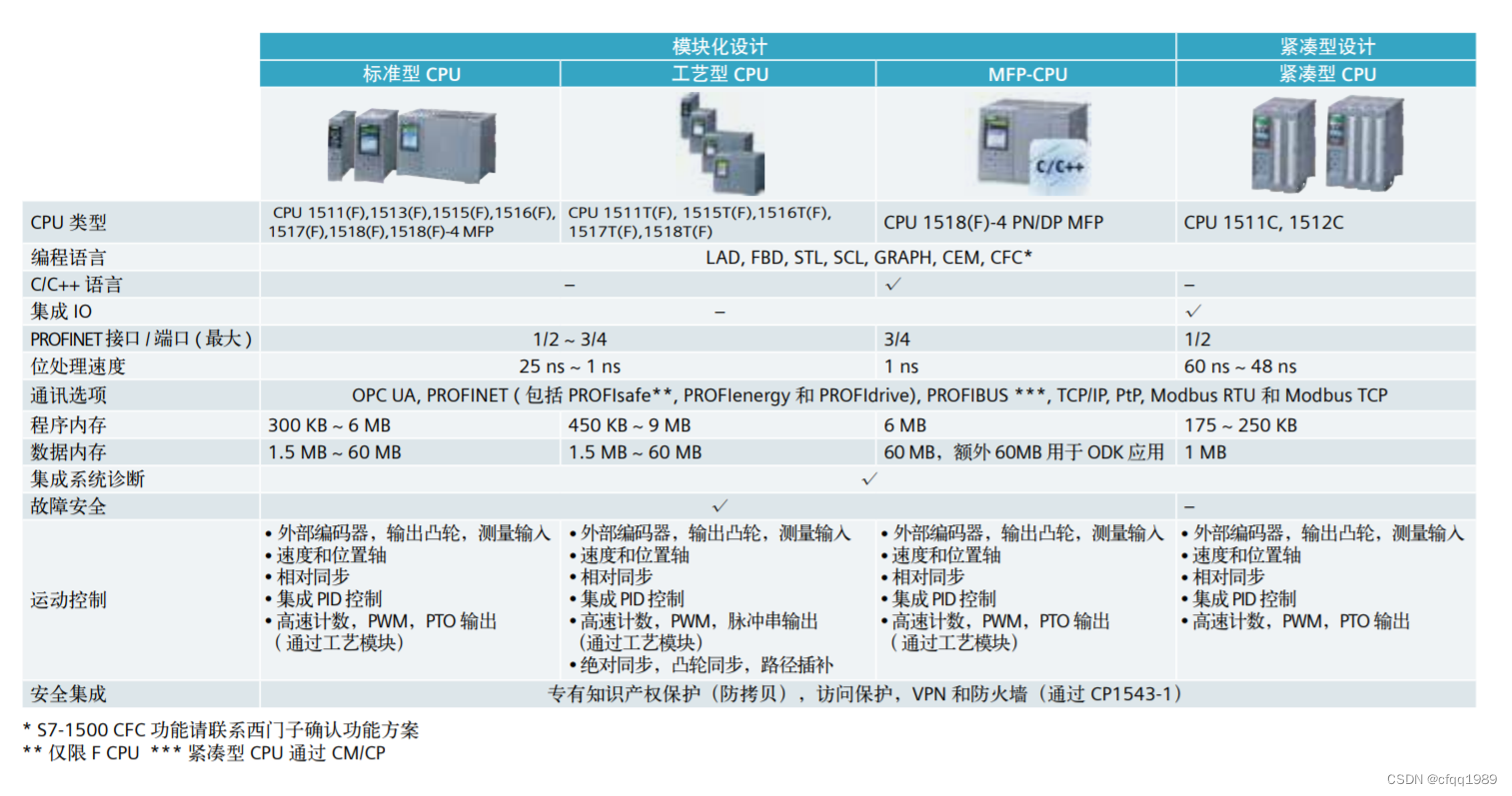
1500:
 ?
?
?
普通:
主机架最大模块数量:32 个;CPU + 31 个模块
编程语言: LAD,FBD,STL,SCL,GRAPH
F:安全型
C:紧凑型,本体带io
T:运动控制
R/H:冗余型CPU 1511(F),1513(F),1515(F),1516(F), 1517(F),1518(F),1518(F)-4 MFP
带凸轮:
CPU 1511T(F), 1515T(F),1516T(F), 1517T(F),1518T(F)
带C/C++:
CPU 1518(F)-4 PN/DP MFP
紧凑型:
CPU 1511C, 1512C
运动控制:

10.1 S7-1500 运动控制 ............................................................................................................ 227
10.1.1 MC_Power........................................................................................................................ 227
10.1.1.1 MC_Power: 启用/禁用工艺对象...................................................................................... 227
10.1.1.2 MC_Power: 功能图 ........................................................................................................ 232
10.1.2 MC_Home ........................................................................................................................ 233
10.1.2.1 MC_Home: 归位工艺对象,设置归位位置 ..................................................................... 233
10.1.3 MC_MoveJog ................................................................................................................... 239
10.1.3.1 MC_MoveJog: 在点动模式下移动轴............................................................................... 239
10.1.3.2 MC_MoveJog:功能图..................................................................................................... 244
10.1.4 MC_MoveVelocity............................................................................................................. 245
10.1.4.1 MC_MoveVelocity: 以指定的速度移动轴........................................................................ 245
10.1.4.2 MC_MoveVelocity:功能图 .............................................................................................. 251
10.1.5 MC_MoveRelative ............................................................................................................ 252
10.1.5.1 MC_MoveRelative: 轴的相对定位 .................................................................................. 252
10.1.5.2 MC_MoveRelative:功能图.............................................................................................. 257
10.1.6 MC_MoveAbsolute ........................................................................................................... 258
10.1.6.1 MC_MoveAbsolute: 轴的绝对定位 ................................................................................. 258
10.1.6.2 MC_MoveAbsolute:功能图............................................................................................. 263
10.1.7 MC_Halt ........................................................................................................................... 264
10.1.7.1 MC_Halt: 停止轴 ............................................................................................................ 264
10.1.7.2 MC_Halt:功能图 ............................................................................................................. 268
10.1.8 MC_Reset ........................................................................................................................ 269
10.1.8.1 MC_Reset: 确认报警,重新启动工艺对象 ..................................................................... 269
文章来源:https://blog.csdn.net/cfqq1989/article/details/135357216
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 打开这个地方,就能让你的手机网速提升好几倍,赶紧来试试!
- 【含ROM】小米刷机之k30pro刷澎湃系统
- MySQL安装服务启动失败解决方案
- 构建二叉树
- AI-数学-初高中-因式分解
- 【python】类的继承、多继承、重写、同名方法调用、super()
- 外汇天眼:CQG 与 TradeStation Securities 的经纪服务集成
- Linux日志分析
- 基于CLIP4Clip的DRL的WTI模块实现
- 【C语言】关闭socket需要包含的头文件