相机坐标系如何转换到世界坐标系。
发布时间:2023年12月27日
问题描述:相机坐标系如何转换到世界坐标系。
问题解答:
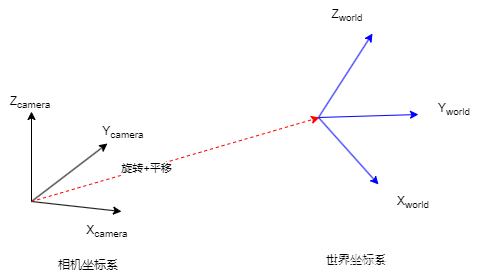
相机坐标系的定义:相机坐标系是以相机为基准建立的坐标系。它通常将相机的光学中心作为原点,相机的光轴为Z轴,X轴和Y轴与图像平面平行,与光轴垂直,形成一个右手坐标系。
世界坐标系的定义:世界坐标系通常是以某个固定的参考点、参考物体或参考方向为基准建立的。这个参考点可以是任何合适的选择,具体取决于应用的领域和需求。例如,在机器人学中,世界坐标系的原点可以选择为机器人基座的中心,或者是机器人末端执行器的中心。在地理信息系统中,世界坐标系的原点通常选择为地球的某个地理位置,例如经纬度为 (0, 0) 的点。
我理解的相机坐标系转换到世界坐标系的过程就是手眼标定过程,手指的是机械臂,眼指的是相机。
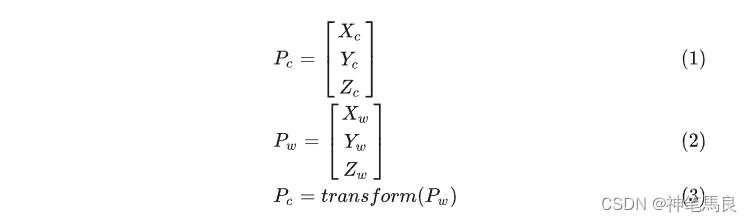
假设物体在相机坐标系中的坐标为,物体在世界坐标系中的坐标为
。则从相机坐标系转换到世界坐标系的转换函数即为transform()
由本科学习到的线性代数知识,一个物体坐标左乘一个矩阵的几何意义是,这个物体进行旋转。物体坐标加上一个向量,即为平移。
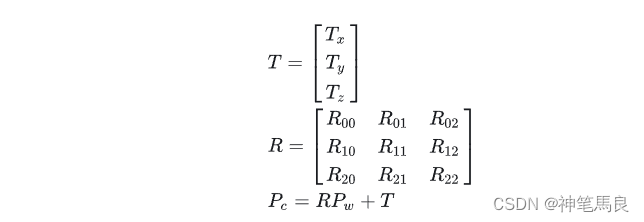
假设平移向量是T,旋转矩阵是R,因此转换函数即为transform()即为
线性代数中常把非齐次坐标转换为齐次坐标,因此,上述转换函数可以改成
上面的这个矩阵就是众所周知的外参矩阵。
文章来源:https://blog.csdn.net/weixin_43501408/article/details/135248453
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- dp专题15 零钱兑换
- Golang 中哪些类型可以作为 map 类型的 key?
- Linux:软硬链接的概念与应用
- css_auto的用法
- 网络工程师:数据库基础知识面试题(七)
- 在Vue3中使用vue-qrcode库实现二维码生成
- PyQt5实现学生管理系统第三天
- BGP Local-preferenct 、AS-Path、 Origin 综合选路实验
- telnet的交互原理(wireshark分析)
- BMP图片信息隐藏