[AutoSar]BSW_OS 02 Autosar OS_STACK
目录
??
关键词
嵌入式、C语言、autosar、OS、BSW
平台说明
| 项目 | Value |
|---|---|
| OS | autosar OS |
| autosar厂商 | vector ,ETAS |
| 芯片厂商 | TI |
| 编程语言 | C,C++ |
| 编译器 | HighTec (GCC) |

一、 task stack
1.1 Task stack 的共享
??为了节约RAM 的使用,TASK间可以共享使用stack,但是要满足以下条件:
1.task 类型必须为basic task。
2.task 的优先级必须相同。
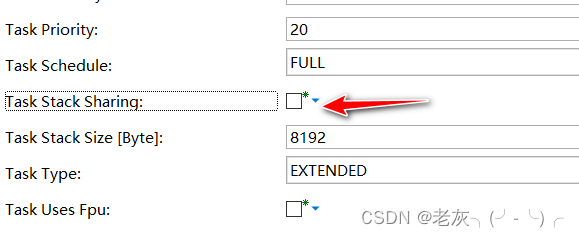
3.task必须配置为非抢占式的且勾选上OsTaskStackSharing
4.task不能调用OS service Schedule()。
5.共享stack 的task必须在同一个核内。
1.2 task stack 的实际使用大小
??vector 工具链中,一般每个task单独使用一个stack。在task 从run进入ready或者waiting的时候,任务的等待事件栈上下文,包括操作系统上下文,本地数据,函数调用的堆栈帧等,被保存到内部操作系统缓冲区中,他们的总大小就是task stack 的实际使用大小。
二、ISR stack
2.1 ISR stack 的共享
??为了节约RAM 的使用,ISR间可以共享使用stack,但是要满足以下条件:
1.ISR必须为2类中断
2.ISR必须在同一个核内。
3.OsIsrEnableNesting必须配置为FALSE。

4.ISR必须为同一优先级。
三、Single-stack(单一栈)和multi-stack (多栈)策略
??此策略出现在ETAS 的实现方式中,Vector没有此策略。
3.1 Single-stack
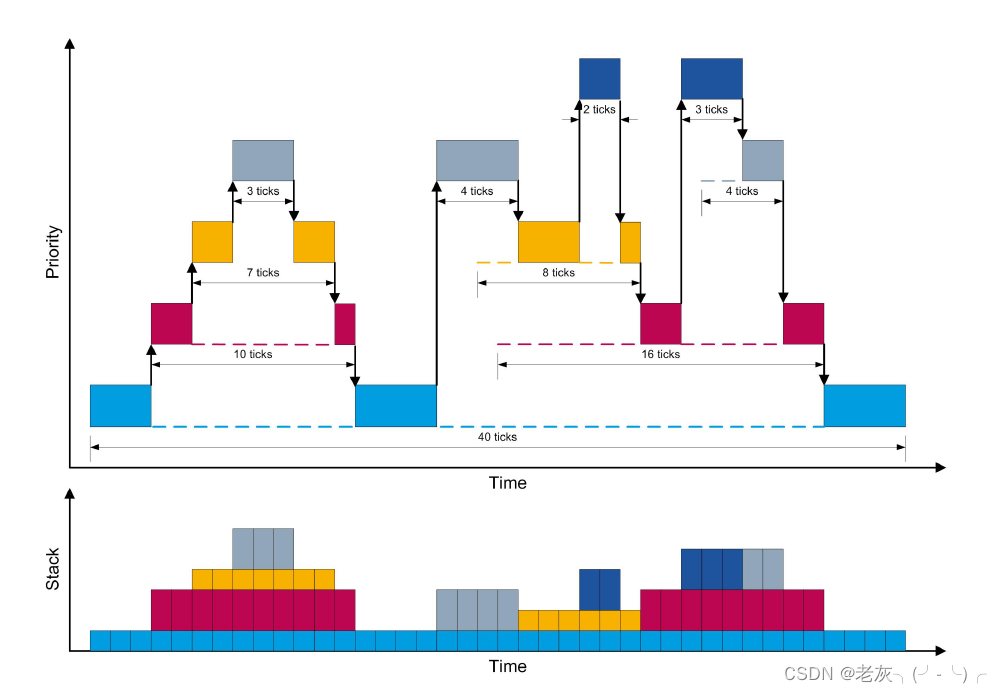
??所谓的单一栈指的是所有的TASK都使用了同一个栈,当task被抢占的时候栈是被叠加的,栈的实际大小会被一直增加。所以在配置stack大小的时候需要考虑到低优先级被抢占的情况避免栈的上溢,OS会以最糟糕的抢占情况下去计算stack。下图为抢占式的task。
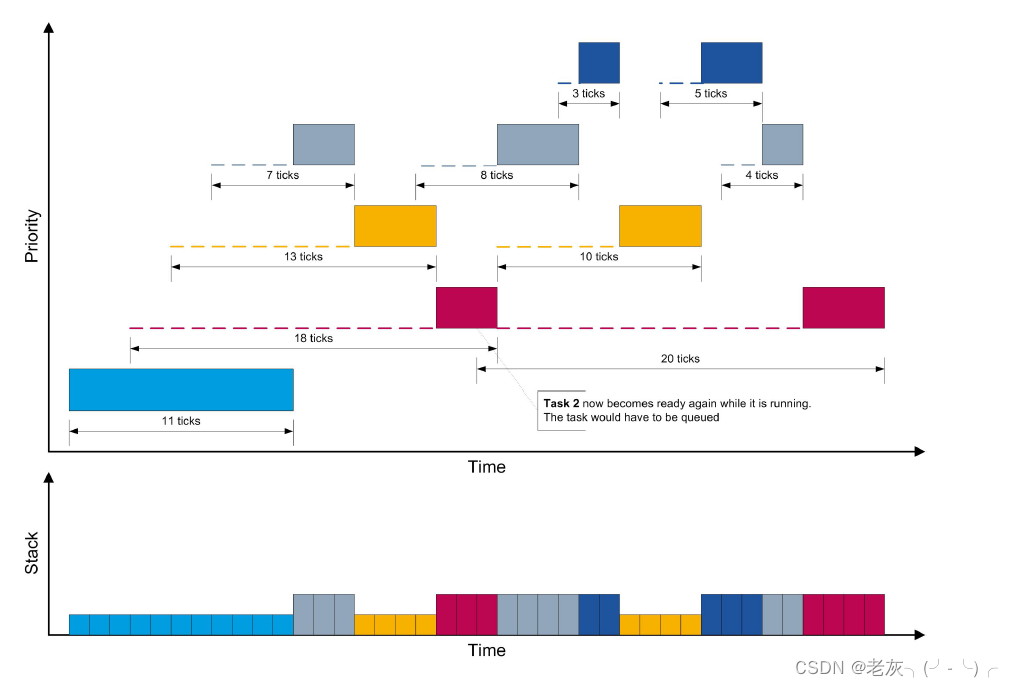
而非抢占式的task的栈大小仅为当前task’的栈大小。如下图所示。
3.2 multi-stack
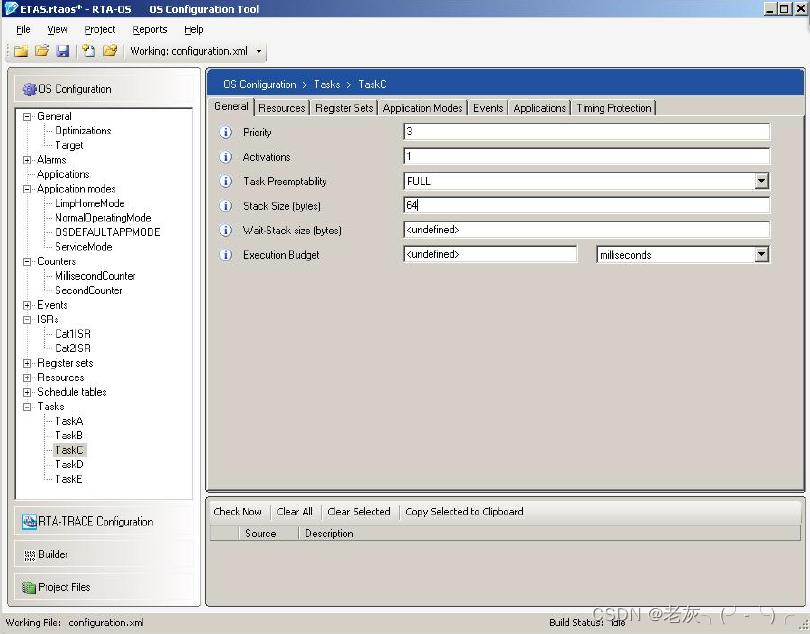
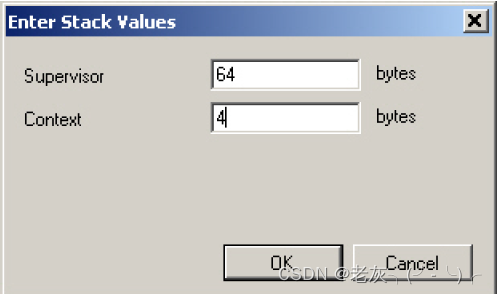
??多栈模式指的是每一个task有单独的stack。即使使用多个物理堆栈,RTA-OS仍然提供单堆栈体系结构的好处——当任务和/或isr共享一个优先级时,每个物理堆栈上所需的堆栈空间可以被覆盖。但是,要使堆栈分配正常工作,您需要指定每个堆栈上所需的空间。如果您配置的目标需要此信息,RTA-OS将要求您提供多个堆栈值。如下图所示:
四、Stack Check Strategy
??不管是何种OS,都应该检测和保护stack避免其溢出。在MICROSAR OS中提供了如下策略:
| Scalability Class | Stack check strategy |
|---|---|
| SC1 / SC2 | Software stack check |
| SC3 / SC4 | Stack supervision by memory protection unit (MPU) |
什么是Scalability Class 见 [AutoSar]BSW_OS 01 Autosar OS入门第四节。
4.1Software Stack Check
??初始化的时候在每一个stack 的最后填充0xAAAAAAAA(以32位单片机为例),当stack切换的时候检测最后这个elment是否被改变来判定stack的溢出。
4.1.1 使用限制
1.适用于SC1 SC2,如果禁用了MPU,SC3和SC4也能用Software Stack Check。
2.无法检测到所有的 栈溢出,因为有的时候相邻的stack已经被覆写了,但是刚好上一个stack 的最后一个element
没被改变。
3.如果内存已经被破坏,Software Stack Check 无法检测stack 溢出。
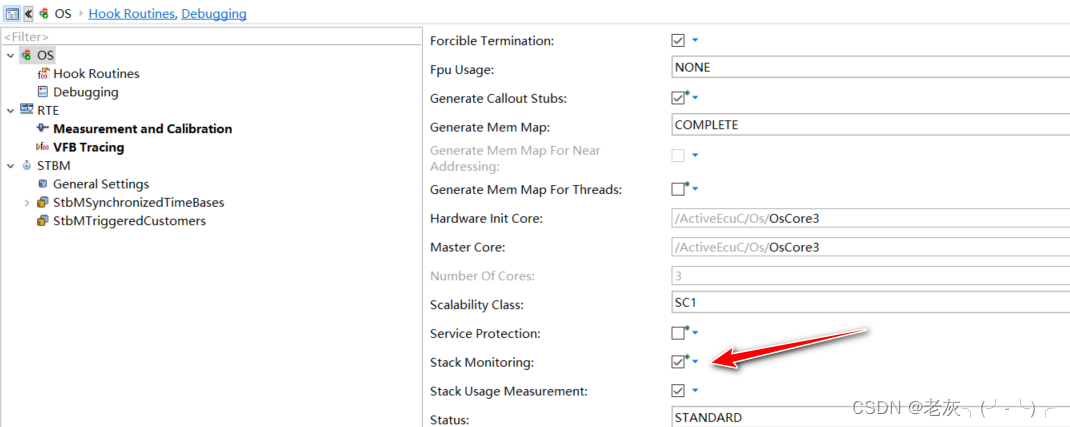
4.1.2配置
??在SC1 SC2 scalability模式下 OsStackMonitoring = true。
4.1.3 检查的调用
?? 如4.1.2所述,一旦激活了该检查机制,OS会自动的检查每个stack,一旦发现溢出则会转入shutdown,如果用户配置了ShutdownHook,在系统关闭前会调用此hook。
4.2 Stack supervision by memory protection unit (MPU)
?? 在OS运行的整个过程中,活动的stack都会交由MPU监控,因此OS会保留一个专用的MPU区域用于在OS切换的时候进行覆写。由于MPU的机制stack不会越界访问,所以stack溢出的情况不会发生,但是内存冲突的情况是可能发生的,一旦检测到内存冲突,会立即调用ProtectionHook(),用户可以在ProtectionHook()中决定如何进行下一步处理。
4.2.1 使用限制
?? 仅仅适用于SC3 SC4.
4.2.2 检查的调用
?? OS会自动初始化一个MPU专有区域来监督stack。如何配置额外的MPU区域和区段链接将在 MPU章节详细讲解。
五、Stack Usage Measurement
?? 我们可以在OS启动后的任一地方调用API来获取当前stack的占用大小。
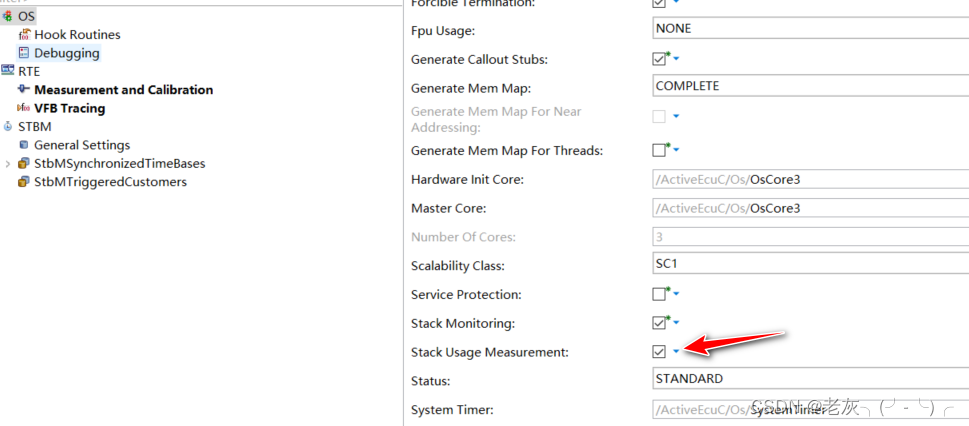
5.1 配置
OsStackUsageMeasurement = true
5.2 API

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【JAVA】Java8开始ConcurrentHashMap,为什么舍弃分段锁
- 23111 网络编程 面试题
- 科技、品质、便利三位一体,点赋共享智能饮品机的崛起
- Java编程案例(专题)
- CCNP课程实验-05-Comprehensive_Experiment
- PDF最强处理工具-StirlingPDF
- Windows系统搭建WebDAV服务并结合内网穿透实现公网访问本地文件
- 低信噪比环境下的GPS信号识别与捕获技术
- VR全景商业宣传优势解析,让用户体验身临其境的感觉
- vue3-事件处理