DL Homework 11
目录
1. 被优化函数??编辑?(代码来源于邱锡鹏老师的神经网络与深度学习的实验)
在展开本次作业之前,首先要明确优化对于深度学习非常重要
训练更快
? ? ? ? 训练复杂的模型可能需要数小时、几天甚至数周
? ? ? ? 优化算法的性能直接影响模型的训练效率
模型更好
? ? ? ? 了解优化算法的原则及其超参数的作用
? ? ? ? 能够以有针对性的方式调整超参数,提高模型的性能
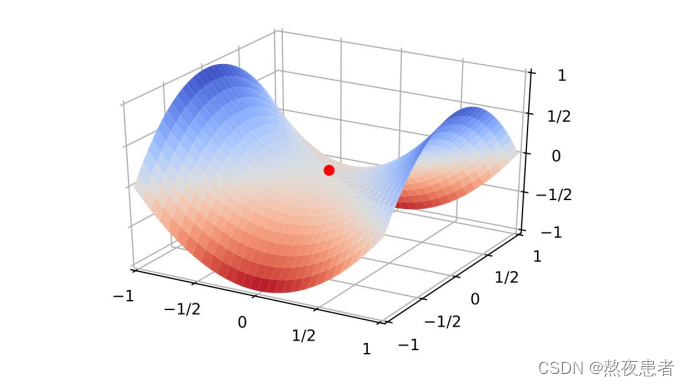
高纬变量的非凸优化
鞍点(saddle point)梯度为0,在一些维度上是最高点,在另一些维度上是最低点。既不是全局最小值也不是局部最小值。
驻点(Stationary Point)梯度为0的点,高纬空间中大部分驻点都是鞍点。
高维空间非凸优化的难点:如何逃离鞍点
在梯度方向上引入随机性,可以有效地逃离鞍点
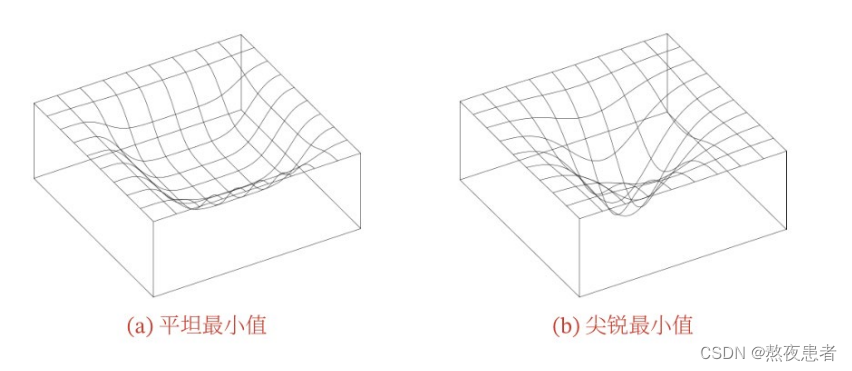
高纬空间的非凸优化问题
模型收敛到平坦局部最小值,鲁棒性会更好,即微小的参数变动不会剧烈影响模型能力;
模型收敛到尖锐局部最小值,鲁棒性会较差
具备良好泛化能力的模型通常应该是鲁棒的,因此理想的局部最小值应该是平坦的
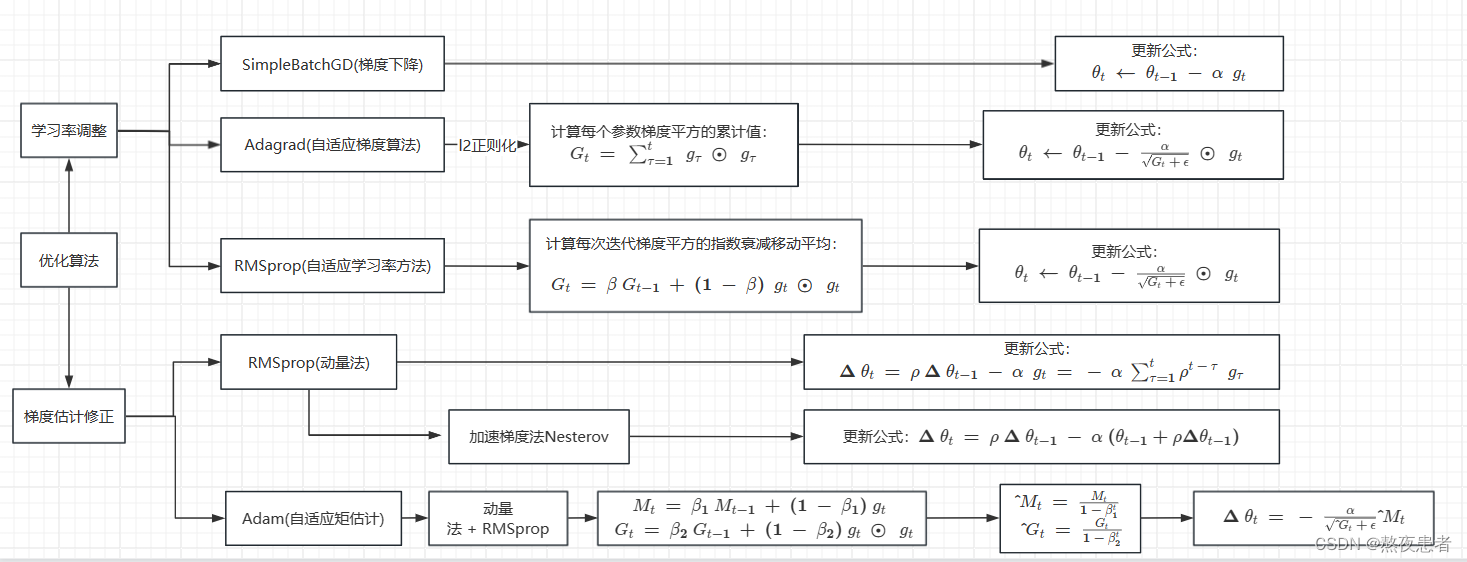
优化算法大体上可以分为两类:
1) 调整学习率, 使得优化更稳定
2) 梯度估计修正, 优化训练速度
简要介绍图中的优化算法,编程实现并2D可视化
1. 被优化函数? ?(代码来源于邱锡鹏老师的神经网络与深度学习的实验)
?(代码来源于邱锡鹏老师的神经网络与深度学习的实验)
期望结果如下:
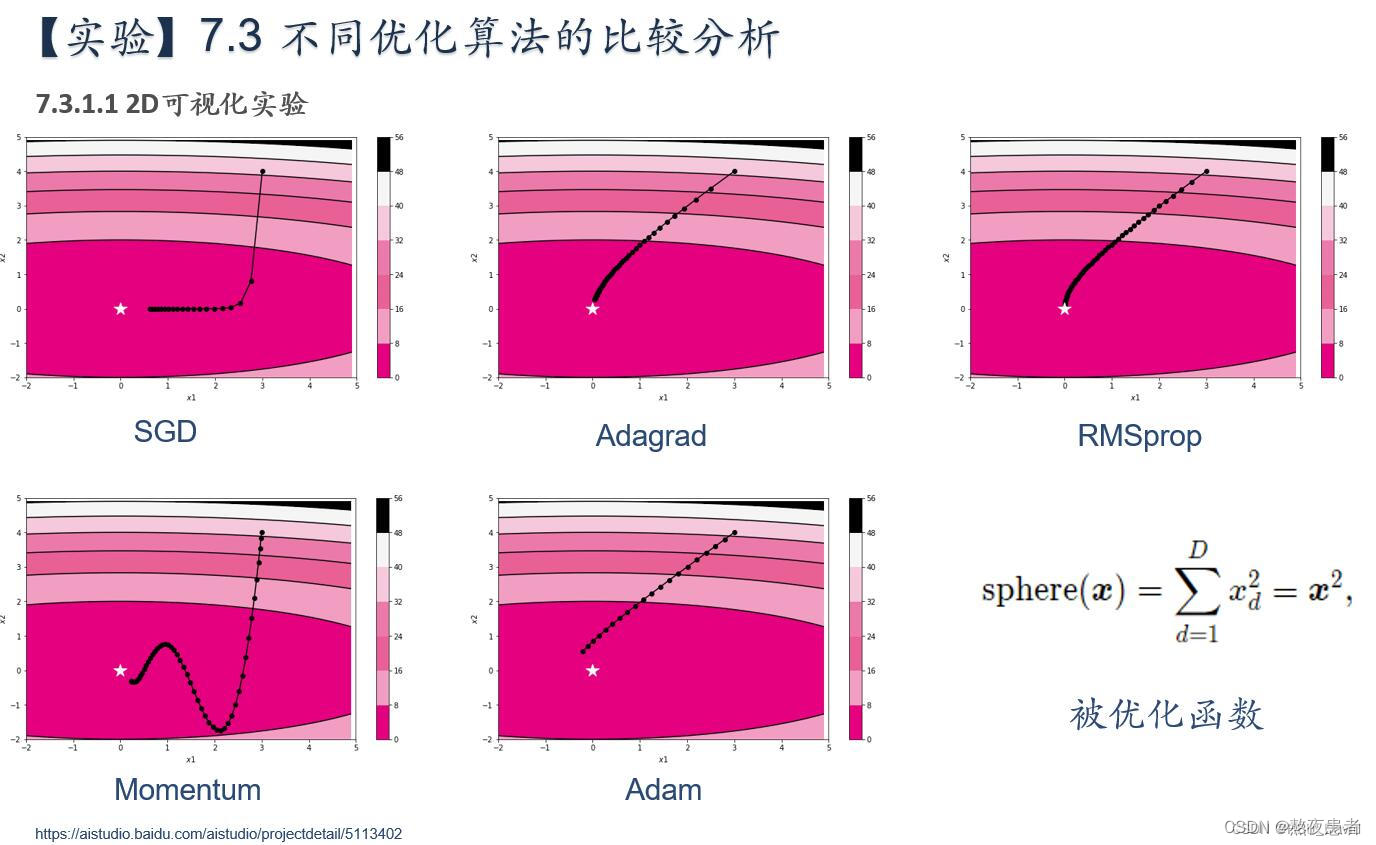
被优化函数选择Sphere函数作为被优化函数,并对比它们的优化效果。Sphere函数的定义为
其中??,?
?表示逐元素平方。Sphere函数有全局的最优点?
。
这里为了展示方便,我们使用二维的输入并略微修改Sphere函数,定义??,并根据梯度下降公式计算对?
?的偏导
其中表示逐元素积。
代码的工程目录如下:

L1.py
引入头文件
from nndl.op import Op
import torch
import copy
import numpy as np
import matplotlib.pyplot as plt将被优化函数实现为OptimizedFunction算子,其forward方法是Sphere函数的前向计算,backward方法则计算被优化函数对??的偏导。代码实现如下:
class OptimizedFunction(Op):
def __init__(self, w):
super(OptimizedFunction, self).__init__()
self.w = torch.as_tensor(w, dtype=torch.float32)
self.params = {'x': torch.as_tensor(0, dtype=torch.float32)}
self.grads = {'x': torch.as_tensor(0, dtype=torch.float32)}
def forward(self, x):
self.params['x'] = x
return torch.matmul(self.w.T, torch.square(self.params['x']))
def backward(self):
self.grads['x'] = 2 * torch.multiply(self.w.T, self.params['x'])训练函数?定义一个简易的训练函数,记录梯度下降过程中每轮的参数??和损失。代码实现如下:?
def train_f(model, optimizer, x_init, epoch):
x = x_init
all_x = []
losses = []
for i in range(epoch):
all_x.append(copy.copy(x.numpy()))
loss = model(x)
losses.append(loss)
model.backward()
optimizer.step()
x = model.params['x']
return torch.as_tensor(np.array(all_x)), losses可视化函数?定义一个Visualization类,用于绘制??的更新轨迹。代码实现如下:
class Visualization(object):
def __init__(self):
x1 = np.arange(-5, 5, 0.1)
x2 = np.arange(-5, 5, 0.1)
x1, x2 = np.meshgrid(x1, x2)
self.init_x = torch.as_tensor(np.array([x1, x2]))
def plot_2d(self, model, x, fig_name):
fig, ax = plt.subplots(figsize=(10, 6))
cp = ax.contourf(self.init_x[0], self.init_x[1], model(self.init_x.transpose(1, 0)),
colors=['#e4007f', '#f19ec2', '#e86096', '#eb7aaa', '#f6c8dc', '#f5f5f5', '#000000'])
c = ax.contour(self.init_x[0], self.init_x[1], model(self.init_x.transpose(1, 0)), colors='black')
cbar = fig.colorbar(cp)
ax.plot(x[:, 0], x[:, 1], '-o', color='#000000')
ax.plot(0, 'w*', markersize=18)
ax.set_xlabel('$x1$')
ax.set_ylabel('$x2$')
ax.set_xlim((-2, 5))
ax.set_ylim((-2, 5))
# plt.savefig(fig_name)
plt.show()定义train_and_plot_f函数,调用train_f和Visualization,训练模型并可视化参数更新轨迹。代码实现如下:
def train_and_plot_f(model, optimizer, epoch, fig_name):
x_init = torch.as_tensor([3, 4], dtype=torch.float32)
print('x1 initiate: {}, x2 initiate: {}'.format(x_init[0].numpy(), x_init[1].numpy()))
x, losses = train_f(model, optimizer, x_init, epoch)
losses = np.array(losses)
# 展示x1、x2的更新轨迹
vis = Visualization()
vis.plot_2d(model, x, fig_name)最后一步,模型训练与可视化? 指定Sphere函数中??的值,实例化被优化函数,通过小批量梯度下降法更新参数,并可视化?
?的更新轨迹。
from nndl.op import SimpleBatchGD
# 固定随机种子
torch.seed()
w = torch.as_tensor([0.2, 2])
model = OptimizedFunction(w)
opt = SimpleBatchGD(init_lr=0.2, model=model)
train_and_plot_f(model, opt, epoch=20, fig_name='opti-vis-para.pdf')
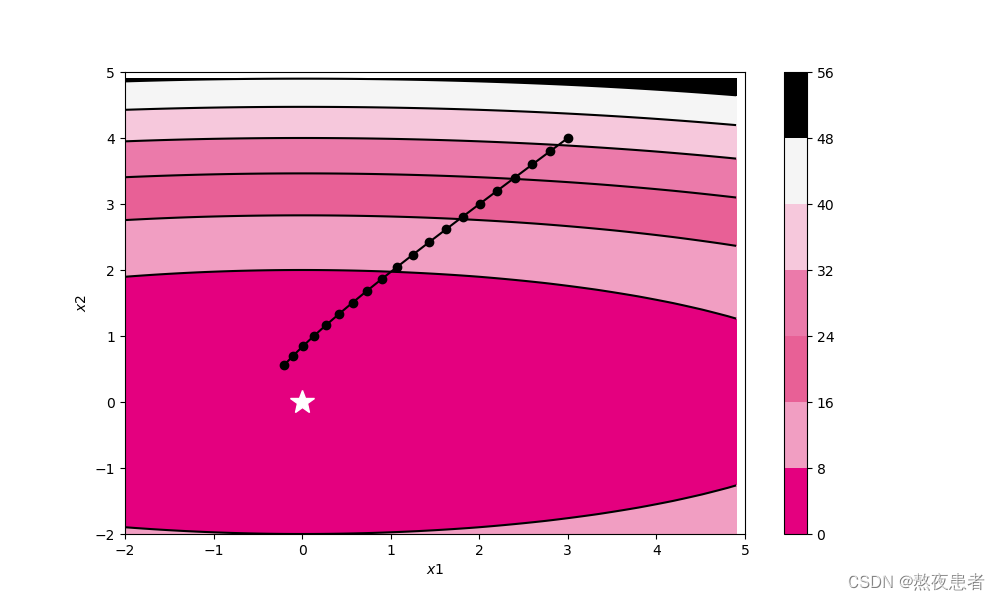
from nndl.op import Adagrad
# 固定随机种子
torch.seed()
w = torch.as_tensor([0.2, 2])
model2 = OptimizedFunction(w)
opt2 = Adagrad(init_lr=0.5, model=model2, epsilon=1e-7)
train_and_plot_f(model2, opt2, epoch=50, fig_name='opti-vis-para2.pdf')
from nndl.op import RMSprop
# 固定随机种子
torch.seed()
w = torch.as_tensor([0.2, 2])
model3 = OptimizedFunction(w)
opt3 = RMSprop(init_lr=0.1, model=model3, beta=0.9, epsilon=1e-7)
train_and_plot_f(model3, opt3, epoch=50, fig_name='opti-vis-para3.pdf')
from nndl.op import Momentum
# 固定随机种子
torch.seed()
w = torch.as_tensor([0.2, 2])
model4 = OptimizedFunction(w)
opt4 = Momentum(init_lr=0.01, model=model4, rho=0.9)
train_and_plot_f(model4, opt4, epoch=50, fig_name='opti-vis-para4.pdf')
from nndl.op import Adam
# 固定随机种子
torch.seed()
w = torch.as_tensor([0.2, 2])
model5 = OptimizedFunction(w)
opt5 = Adam(init_lr=0.2, model=model5, beta1=0.9, beta2=0.99, epsilon=1e-7)
train_and_plot_f(model5, opt5, epoch=20, fig_name='opti-vis-para5.pdf')op.py
op文件主要是保存的各个学习器的算子等等,代码如下:
from abc import abstractmethod
import torch
class Op(object):
def __init__(self):
pass
def __call__(self, inputs):
return self.forward(torch.as_tensor(inputs,dtype=torch.float32))
def forward(self, inputs):
raise NotImplementedError
def backward(self, inputs):
raise NotImplementedError
# 优化器基类
class Optimizer(object):
def __init__(self, init_lr, model):
self.init_lr = init_lr
#指定优化器需要优化的模型
self.model = model
@abstractmethod
def step(self):
pass(1)SimpleBatchGD
????????梯度下降优化器SimpleBatchGD。按照梯度下降的梯度更新公式??进行梯度更新。
class SimpleBatchGD(Optimizer):
def __init__(self, init_lr, model):
super(SimpleBatchGD, self).__init__(init_lr=init_lr, model=model)
def step(self):
#参数更新
if isinstance(self.model.params, dict):
for key in self.model.params.keys():
self.model.params[key] = self.model.params[key] - self.init_lr * self.model.grads[key]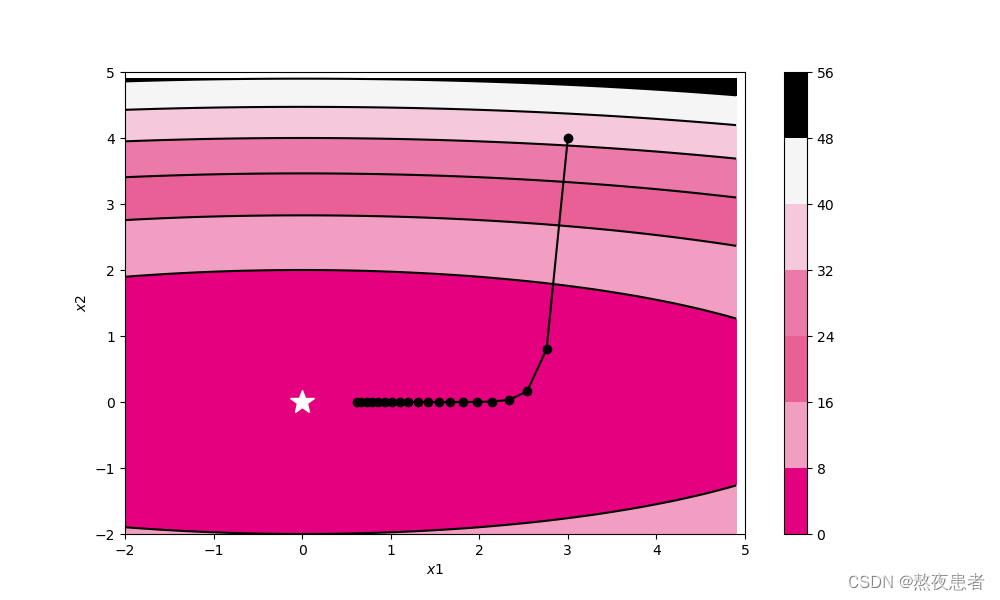
(2)Adagrad
AdaGrad算法(Adaptive Gradient Algorithm,自适应梯度算法)是借鉴 正则化的思想,每次迭代时自适应地调整每个参数的学习率。在第?
?次迭代时,先计算每个参数梯度平方的累计值。
其中??为按元素乘积,
?是第?
?次迭代时的梯,
?为梯度平方的累计值
其中??是初始的学习率,?
?是为了保持数值稳定性而设置的非常小的常数,一般取值?
?到?
?。此外,这里的开平方、除、加运算都是按元素进行的操作。
torch.optim.Adagrad(params, lr=0.01, lr_decay=0, weight_decay=0, initial_accumulator_value=0, eps=1e-10)- 如果某个参数的偏导数累积比较大,其学习率相对较小
- 如果某个参数的偏导数累积比较小,其学习率相对较大
构建优化器? 定义Adagrad类,继承Optimizer类。定义step函数调用adagrad进行参数更新。代码实现如下:
class Adagrad(Optimizer):
def __init__(self, init_lr, model, epsilon):
super(Adagrad, self).__init__(init_lr=init_lr, model=model)
self.G = {}
for key in self.model.params.keys():
self.G[key] = 0
self.epsilon = epsilon
def adagrad(self, x, gradient_x, G, init_lr):
G += gradient_x ** 2
x -= init_lr / torch.sqrt(G + self.epsilon) * gradient_x
return x, G
def step(self):
for key in self.model.params.keys():
self.model.params[key], self.G[key] = self.adagrad(self.model.params[key],
self.model.grads[key],
self.G[key],
self.init_lr)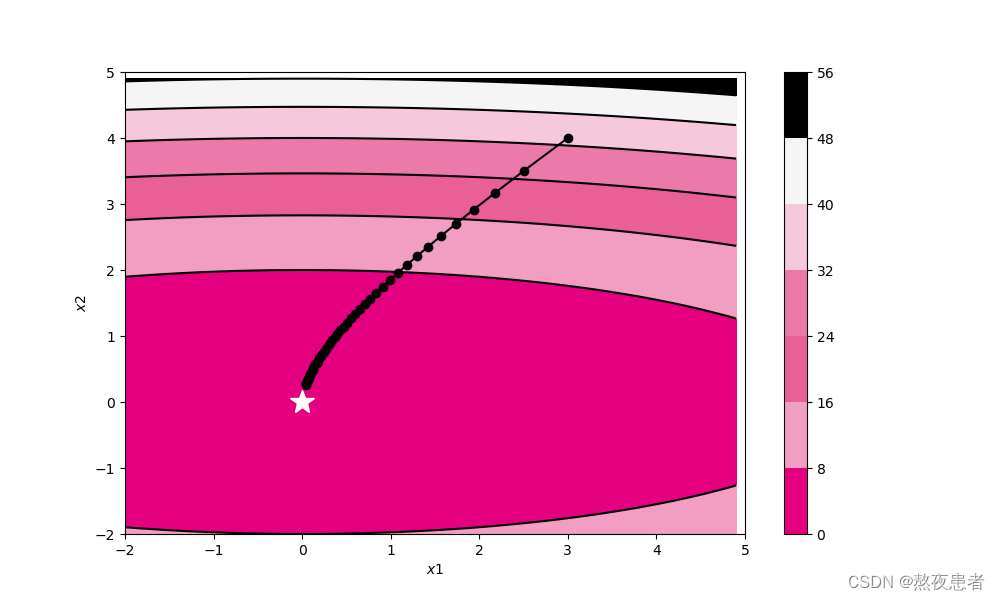
(3)RMSprop
RMSprop算法是一种自适应学习率的方法,可以在有些情况下避免AdaGrad算法中学习率不断单调下降以至于过早衰减的缺点。
RMSprop算法首先计算每次迭代梯度平方??的加权移动平均(指数衰减移动平均)
其中??为衰减率,一般取值为0.9。
RMSprop算法的参数更新差值为:
其中??是初始的学习率,比如0.001。RMSprop算法和AdaGrad算法的区别在于RMSprop算法中?
?的计算由累积方式变成了加权移动平均。在迭代过程中,每个参数的学习率并不是呈衰减趋势,既可以变小也可以变大。
torch.optim.RMSprop(params, lr=0.01, alpha=0.99, eps=1e-08, weight_decay=0, momentum=0, centered=False)构建优化器? 定义RMSprop类,继承Optimizer类。定义step函数调用rmsprop更新参数。代码实现如下:
class RMSprop(Optimizer):
def __init__(self, init_lr, model, beta, epsilon):
super(RMSprop, self).__init__(init_lr=init_lr, model=model)
self.G = {}
for key in self.model.params.keys():
self.G[key] = 0
self.beta = beta
self.epsilon = epsilon
def rmsprop(self, x, gradient_x, G, init_lr):
"""
rmsprop算法更新参数,G为迭代梯度平方的加权移动平均
"""
G = self.beta * G + (1 - self.beta) * gradient_x ** 2
x -= init_lr / torch.sqrt(G + self.epsilon) * gradient_x
return x, G
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.G[key] = self.rmsprop(self.model.params[key],
self.model.grads[key],
self.G[key],
self.init_lr)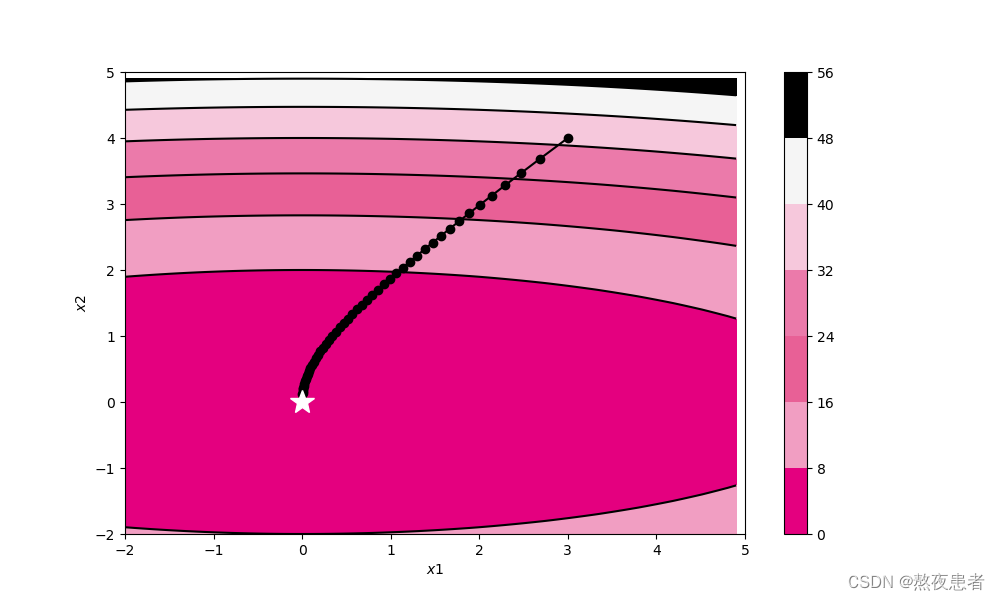
(4)Momentum
动量法(Momentum Method)是用之前积累动量来替代真正的梯度。每次迭代的梯度可以看作加速度。
在第??次迭代时,计算负梯度的“加权移动平均”作为参数的更新方向,
其中??为动量因子,通常设为0.9,?
?为学习率。
这样,每个参数的实际更新差值取决于最近一段时间内梯度的加权平均值。当某个参数在最近一段时间内的梯度方向不一致时,其真实的参数更新幅度变小。相反,当某个参数在最近一段时间内的梯度方向都一致时,其真实的参数更新幅度变大,起到加速作用。一般而言,在迭代初期,梯度方向都比较一致,动量法会起到加速作用,可以更快地到达最优点。在迭代后期,梯度方向会不一致,在收敛值附近振荡,动量法会起到减速作用,增加稳定性。从某种角度来说,当前梯度叠加上部分的上次梯度,一定程度上可以近似看作二阶梯度。
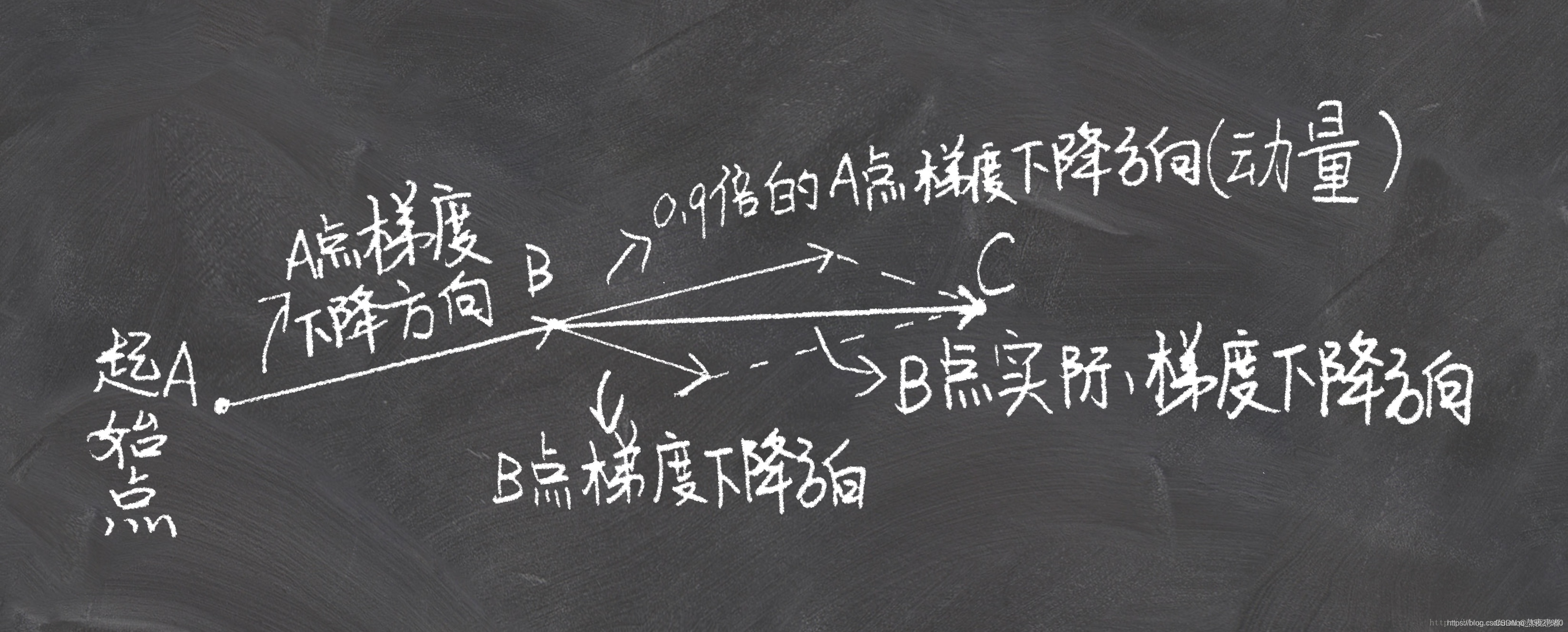
当然如果就看理论可能不太好理解,看图
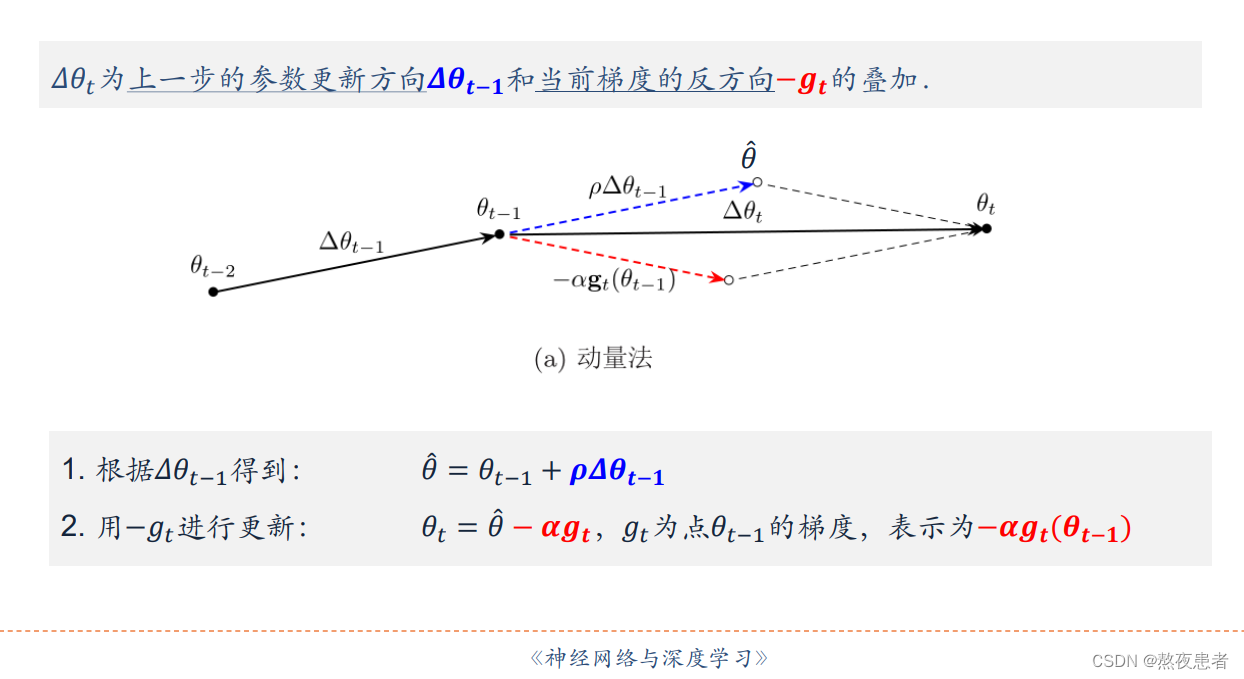
这个图其实较为明确的指出了,最后梯度方向是由前一次的梯度方向和这一次的梯度方向共同决定,如果觉得这个图字母太多不爱看,那看如下这个,我认为是我目前看到的最明了的图:
构建优化器? 定义Momentum类,继承Optimizer类。定义step函数调用momentum进行参数更新。代码实现如下:
class Momentum(Optimizer):
def __init__(self, init_lr, model, rho):
super(Momentum, self).__init__(init_lr=init_lr, model=model)
self.delta_x = {}
for key in self.model.params.keys():
self.delta_x[key] = 0
self.rho = rho
def momentum(self, x, gradient_x, delta_x, init_lr):
"""
momentum算法更新参数,delta_x为梯度的加权移动平均
"""
delta_x = self.rho * delta_x - init_lr * gradient_x
x += delta_x
return x, delta_x
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.delta_x[key] = self.momentum(self.model.params[key],
self.model.grads[key],
self.delta_x[key],
self.init_lr)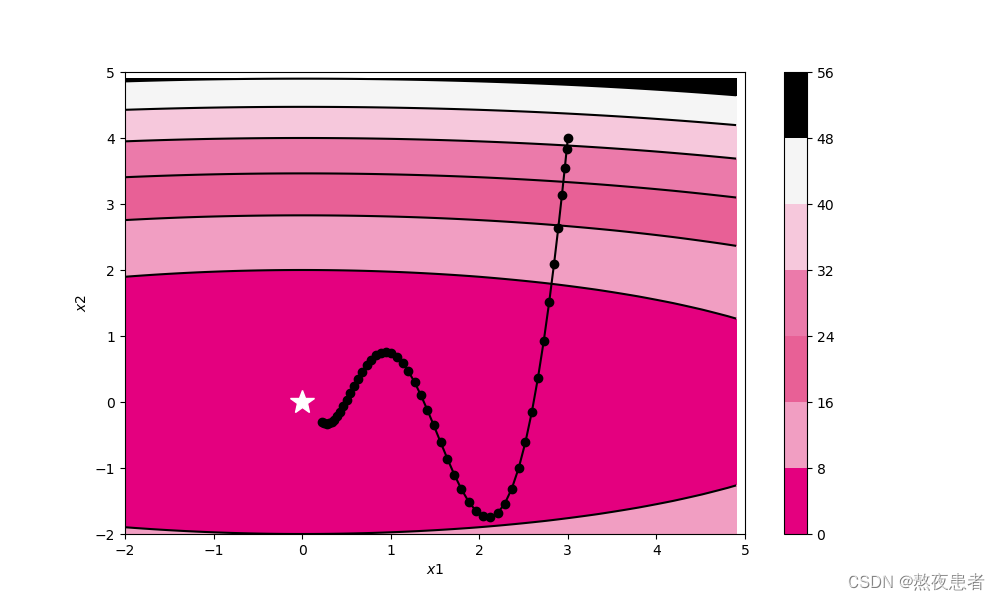
(5)Adam
Adam算法(Adaptive Moment Estimation Algorithm,自适应矩估计算法)可以看作动量法和RMSprop算法的结合,不但使用动量作为参数更新方向,而且可以自适应调整学习率。
Adam算法一方面计算梯度平方??的加权移动平均(和RMSprop算法类似),另一方面计算梯度?
?的加权移动平均(和动量法类似)。
其中??和?
?分别为两个移动平均的衰减率,通常取值为?
?。我们可以把?
?和?
?分别看作梯度的均值(一阶矩)和未减去均值的方差(二阶矩)。
假设??,那么在迭代初期?
?和?
?的值会比真实的均值和方差要小。特别是当?
?和?
?都接近于1时,偏差会很大。因此,需要对偏差进行修正。
Adam算法的参数更新差值为
其中学习率??通常设为0.001,并且也可以进行衰减,比如?
?。
构建优化器? 定义Adam类,继承Optimizer类。定义step函数调用adam函数更新参数。代码实现如下:
class Adam(Optimizer):
def __init__(self, init_lr, model, beta1, beta2, epsilon):
super(Adam, self).__init__(init_lr=init_lr, model=model)
self.beta1 = beta1
self.beta2 = beta2
self.epsilon = epsilon
self.M, self.G = {}, {}
for key in self.model.params.keys():
self.M[key] = 0
self.G[key] = 0
self.t = 1
def adam(self, x, gradient_x, G, M, t, init_lr):
M = self.beta1 * M + (1 - self.beta1) * gradient_x
G = self.beta2 * G + (1 - self.beta2) * gradient_x ** 2
M_hat = M / (1 - self.beta1 ** t)
G_hat = G / (1 - self.beta2 ** t)
t += 1
x -= init_lr / torch.sqrt(G_hat + self.epsilon) * M_hat
return x, G, M, t
def step(self):
"""参数更新"""
for key in self.model.params.keys():
self.model.params[key], self.G[key], self.M[key], self.t = self.adam(self.model.params[key],
self.model.grads[key],
self.G[key],
self.M[key],
self.t,
self.init_lr)
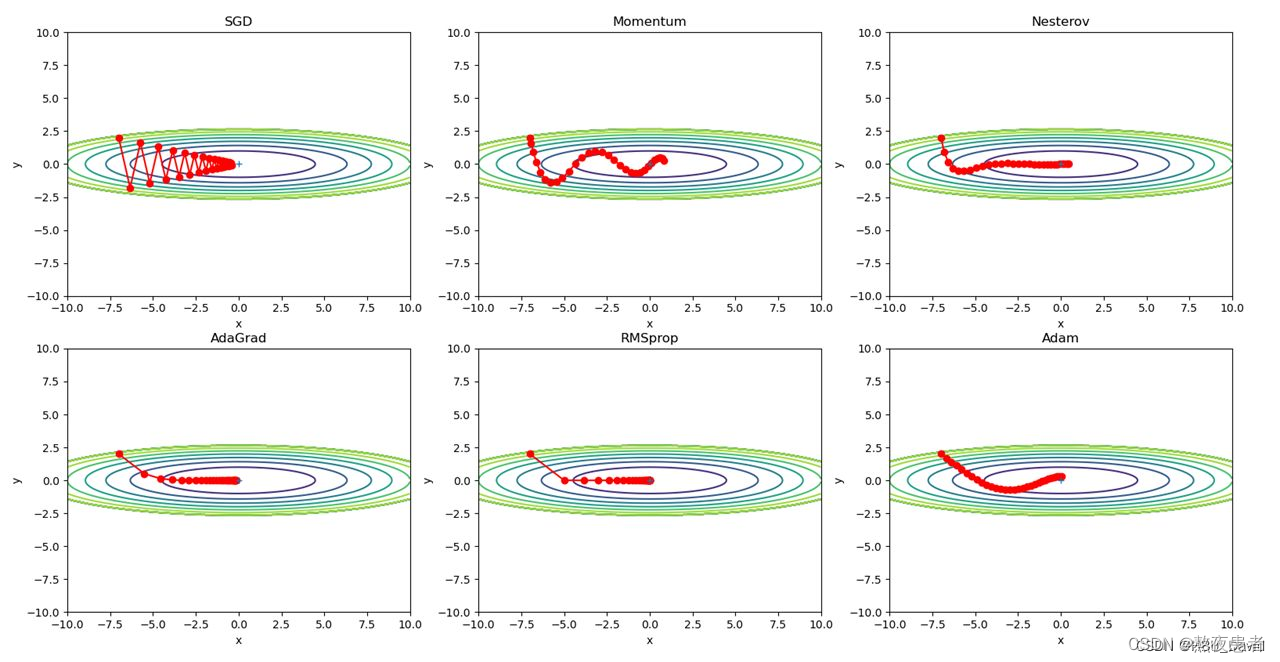
2.被优化函数? ?
?
预期结果如下:
代码如下,来源老师的博客【NNDL 作业】优化算法比较 增加 RMSprop、Nesterov_随着优化的进展,需要调整γ吗?rmsprop算法习题-CSDN博客
# coding: utf-8
import numpy as np
import matplotlib.pyplot as plt
from collections import OrderedDict
class SGD:
"""随机梯度下降法(Stochastic Gradient Descent)"""
def __init__(self, lr=0.01):
self.lr = lr
def update(self, params, grads):
for key in params.keys():
params[key] -= self.lr * grads[key]
class Momentum:
"""Momentum SGD"""
def __init__(self, lr=0.01, momentum=0.9):
self.lr = lr
self.momentum = momentum
self.v = None
def update(self, params, grads):
if self.v is None:
self.v = {}
for key, val in params.items():
self.v[key] = np.zeros_like(val)
for key in params.keys():
self.v[key] = self.momentum * self.v[key] - self.lr * grads[key]
params[key] += self.v[key]
class Nesterov:
"""Nesterov's Accelerated Gradient (http://arxiv.org/abs/1212.0901)"""
def __init__(self, lr=0.01, momentum=0.9):
self.lr = lr
self.momentum = momentum
self.v = None
def update(self, params, grads):
if self.v is None:
self.v = {}
for key, val in params.items():
self.v[key] = np.zeros_like(val)
for key in params.keys():
self.v[key] *= self.momentum
self.v[key] -= self.lr * grads[key]
params[key] += self.momentum * self.momentum * self.v[key]
params[key] -= (1 + self.momentum) * self.lr * grads[key]
class AdaGrad:
"""AdaGrad"""
def __init__(self, lr=0.01):
self.lr = lr
self.h = None
def update(self, params, grads):
if self.h is None:
self.h = {}
for key, val in params.items():
self.h[key] = np.zeros_like(val)
for key in params.keys():
self.h[key] += grads[key] * grads[key]
params[key] -= self.lr * grads[key] / (np.sqrt(self.h[key]) + 1e-7)
class RMSprop:
"""RMSprop"""
def __init__(self, lr=0.01, decay_rate=0.99):
self.lr = lr
self.decay_rate = decay_rate
self.h = None
def update(self, params, grads):
if self.h is None:
self.h = {}
for key, val in params.items():
self.h[key] = np.zeros_like(val)
for key in params.keys():
self.h[key] *= self.decay_rate
self.h[key] += (1 - self.decay_rate) * grads[key] * grads[key]
params[key] -= self.lr * grads[key] / (np.sqrt(self.h[key]) + 1e-7)
class Adam:
"""Adam (http://arxiv.org/abs/1412.6980v8)"""
def __init__(self, lr=0.001, beta1=0.9, beta2=0.999):
self.lr = lr
self.beta1 = beta1
self.beta2 = beta2
self.iter = 0
self.m = None
self.v = None
def update(self, params, grads):
if self.m is None:
self.m, self.v = {}, {}
for key, val in params.items():
self.m[key] = np.zeros_like(val)
self.v[key] = np.zeros_like(val)
self.iter += 1
lr_t = self.lr * np.sqrt(1.0 - self.beta2 ** self.iter) / (1.0 - self.beta1 ** self.iter)
for key in params.keys():
self.m[key] += (1 - self.beta1) * (grads[key] - self.m[key])
self.v[key] += (1 - self.beta2) * (grads[key] ** 2 - self.v[key])
params[key] -= lr_t * self.m[key] / (np.sqrt(self.v[key]) + 1e-7)
def f(x, y):
return x ** 2 / 20.0 + y ** 2
def df(x, y):
return x / 10.0, 2.0 * y
init_pos = (-7.0, 2.0)
params = {}
params['x'], params['y'] = init_pos[0], init_pos[1]
grads = {}
grads['x'], grads['y'] = 0, 0
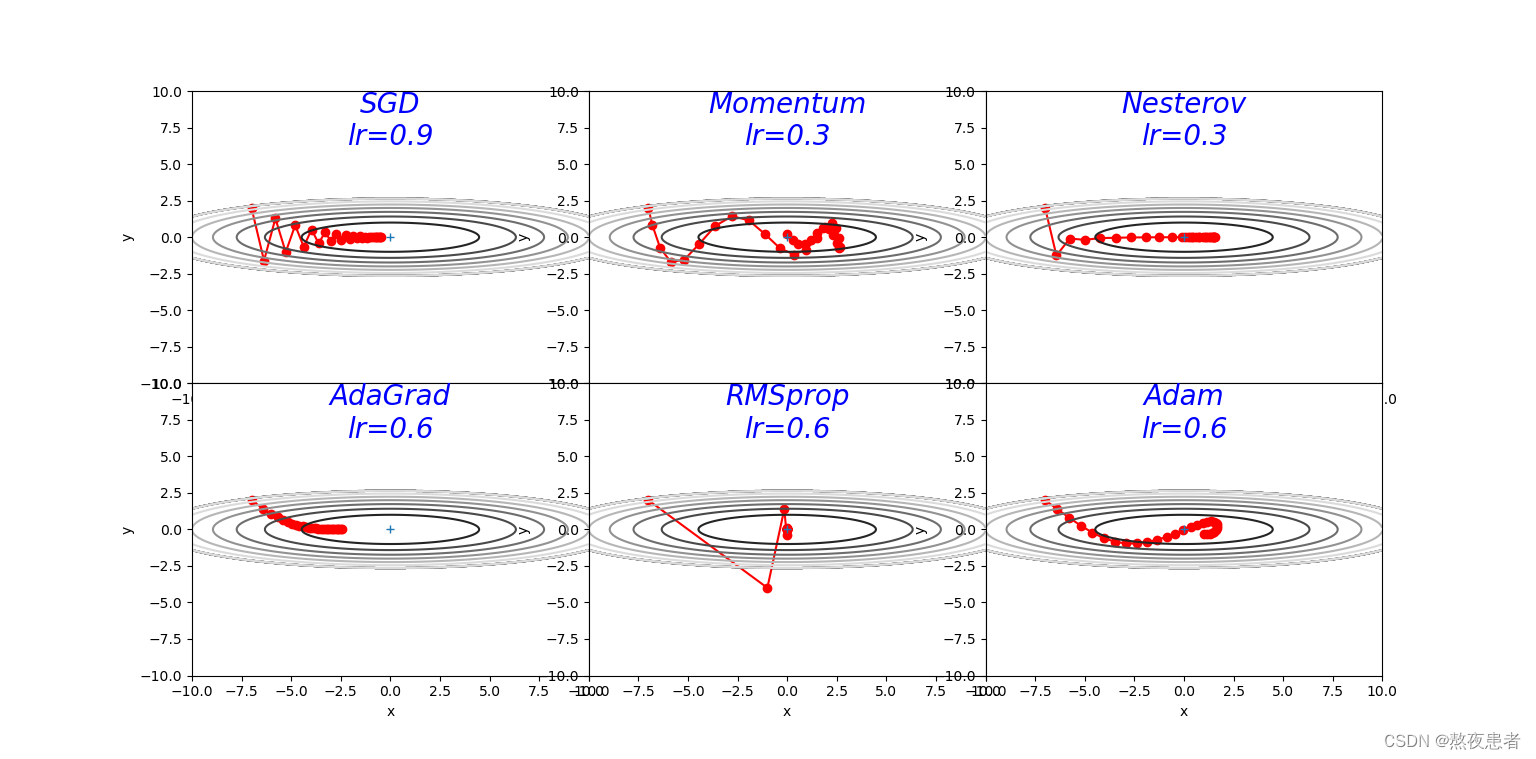
learningrate = [0.9, 0.3, 0.3, 0.6, 0.6, 0.6, 0.6]
optimizers = OrderedDict()
optimizers["SGD"] = SGD(lr=learningrate[0])
optimizers["Momentum"] = Momentum(lr=learningrate[1])
optimizers["Nesterov"] = Nesterov(lr=learningrate[2])
optimizers["AdaGrad"] = AdaGrad(lr=learningrate[3])
optimizers["RMSprop"] = RMSprop(lr=learningrate[4])
optimizers["Adam"] = Adam(lr=learningrate[5])
idx = 1
id_lr = 0
for key in optimizers:
optimizer = optimizers[key]
lr = learningrate[id_lr]
id_lr = id_lr + 1
x_history = []
y_history = []
params['x'], params['y'] = init_pos[0], init_pos[1]
for i in range(30):
x_history.append(params['x'])
y_history.append(params['y'])
grads['x'], grads['y'] = df(params['x'], params['y'])
optimizer.update(params, grads)
x = np.arange(-10, 10, 0.01)
y = np.arange(-5, 5, 0.01)
X, Y = np.meshgrid(x, y)
Z = f(X, Y)
# for simple contour line
mask = Z > 7
Z[mask] = 0
# plot
plt.subplot(2, 3, idx)
idx += 1
plt.plot(x_history, y_history, 'o-', color="r")
# plt.contour(X, Y, Z) # 绘制等高线
plt.contour(X, Y, Z, cmap='gray') # 颜色填充
plt.ylim(-10, 10)
plt.xlim(-10, 10)
plt.plot(0, 0, '+')
# plt.axis('off')
# plt.title(key+'\nlr='+str(lr), fontstyle='italic')
plt.text(0, 10, key + '\nlr=' + str(lr), fontsize=20, color="b",
verticalalignment='top', horizontalalignment='center', fontstyle='italic')
plt.xlabel("x")
plt.ylabel("y")
plt.subplots_adjust(wspace=0, hspace=0) # 调整子图间距
plt.show()结果如下:
?3.解释不同轨迹的形成原因,并分析各个算法的优缺点
(1)SimpleBatchGD
轨迹形成原因:SGD收敛轨迹呈“之”字形的原因主要是由于梯度下降过程中,学习率过高或者数据集中存在一些特殊情况(如个别样本的梯度值与其他样本相比过大或过小),导致更新方向在每次迭代中变化很大,使得算法无法稳定地朝着全局最优解的方向前进。如果在函数的形状非均向时,单纯朝着梯度方向更新参数,容易使得算法在某些方向上的更新幅度大,而在其他方向上的更新幅度小,从而出现“之”字形的收敛轨迹。
优点:
????????由于不是在全部训练数据上的损失函数,而是在每轮迭代中,随机优化某一条训练数据上的损失函数,这样每一轮参数的更新速度大大加快。
缺点:
- 准确度下降。由于即使在目标函数为强凸函数的情况下,SGD仍旧无法做到线性收敛。
- 可能会收敛到局部最优,由于单个样本并不能代表全体样本的趋势.
- 不易于并行实现。
(2)Adagrad
轨迹形成的原因:函数的取值高效地向着最小值移动。 由于y轴方向上的梯度较大,因此刚开始变动较大,但是后面会根据这个较大的变动按比例进行调整,减小更新的步伐。 因此y轴方向上的更新程度被减弱,“之”字形的变动程度有所衰减.
优点:
-
自适应学习率:AdaGrad算法通过自适应地调整学习率,能够更好地适应不同的参数更新情况,提高了算法的效率和稳定性。
-
支持稀疏数据:AdaGrad算法能够自适应地调整每个参数的学习率,对于稀疏数据能够更好地适应和处理。
-
不需要手动调整学习率:AdaGrad算法不需要手动调整学习率,能够减少调参的时间和成本。
缺点:
-
无法处理非凸函数:由于学习率的不断衰减,AdaGrad算法可能会在后期陷入局部最优解,无法处理非凸函数。
-
参数更新过于激进:由于学习率的不断减小,AdaGrad算法可能会导致部分参数更新过于激进,导致优化过程不稳定。
-
可能会出现过拟合:由于学习率的逐渐减小,AdaGrad算法可能会导致过早停止更新,出现过拟合的情况。
(3)RMSprop
轨迹形成原因:RMSprop算法相较于AdaGrad算法,在学习率变化方面表现更加平缓和稳定,因此能够更有效地收敛到损失函数的最小值。它通过引入指数加权移动平均来调整学习率,使得在训练过程中逐渐遗忘过去的梯度,只受近期梯度的影响。这样可以解决AdaGrad算法在训练后期学习率衰减过快的问题。
优点:
-
自适应学习率:RMSprop算法通过自适应地调整学习率和梯度的平均值,能够更好地适应不同的参数更新情况,提高了算法的效率和稳定性。
-
支持稀疏数据:RMSprop算法能够自适应地调整每个参数的学习率和梯度平均值,对于稀疏数据能够更好地适应和处理。
-
收敛速度快:由于学习率和梯度平均值的自适应调整,RMSprop算法在优化过程中能够更快地收敛到最优解。
缺点:
-
对超参数敏感:RMSprop算法对超参数的选择非常敏感,可能需要进行比较多的调参才能得到最优的结果。
-
可能会出现震荡:由于学习率和梯度平均值的自适应调整,RMSprop算法可能会导致参数更新方向的变化,出现震荡的情况。
-
可能会导致梯度消失或爆炸:由于梯度平均值的存在,RMSprop算法可能会导致梯度消失或爆炸的问题。
(4)Momentum
轨迹形成的原因:x轴方向上受到的力小,一直在同向受力,所以会加速。y轴方向上受到的力大,交互正反向的力,会互相抵消。和SGD相比,可更快朝x轴方向靠近,减弱“之”字形变动程度.
优点:
-
加速收敛:Momentum算法可以加速模型训练的收敛速度,特别是在出现局部最小值或平坦区域时,能够帮助模型跳出局部最小值并快速朝向全局最优解。
-
抑制震荡:由于动量的引入,Momentum算法有助于抑制参数更新过程中的震荡,使得模型训练更加稳定。
-
减少方向变化:在参数更新时,Momentum算法可以减少因梯度方向变化导致的参数更新幅度剧烈波动,从而使得参数更新更加平滑。
缺点:
-
需要调节超参数:Momentum算法需要调节一个称为动量系数的超参数,选择不合适的动量系数可能导致模型表现不佳。
-
可能陷入局部最小值:由于动量的引入,Momentum算法在一些情况下可能无法精确地收敛到全局最小值,而是停留在局部最小值附近。
-
对某些数据集不适用:Momentum算法在某些数据集上可能表现不佳,特别是在具有大量平坦区域的数据集上,可能导致算法在平坦区域震荡并难以收敛。
(5)Adam
轨迹形成原因:Adam算法结合了动量法和RMSprop算法的优点,可以自适应地调整学习率,并且在训练过程中能够快速收敛到最优点。由于Adam算法同时考虑了梯度的一阶矩估计(类似于动量)和二阶矩估计(类似于RMSprop),因此在参数更新过程中更加平稳和稳定。使其收敛轨迹图通常表现为前期收敛幅度较大,后期逐渐平稳,朝着最优点不断移动的特点。
优点:
-
自适应调节:Adam算法可以自适应地调节每个参数的学习率,根据每个参数的历史梯度信息和动量来计算每个参数的有效学习率,从而使得参数更新更加准确和高效。
-
加速收敛:Adam算法通过自适应调节学习率,可以加速模型训练的收敛速度,在相同迭代次数下比Momentum和Adagrad算法更快地收敛。
-
适用于大规模数据集:Adam算法对于大规模数据集和高维度数据具有很好的表现,可以在保证效果的同时,减少了调参的工作量。
缺点:
-
内存占用较高:Adam算法需要保存每个参数的历史梯度信息和动量,因此内存占用较高,尤其是对于大规模模型和大规模数据集,可能会导致内存不足的问题。
-
对超参数敏感:Adam算法需要调节一些超参数,如学习率、动量系数以及两个平滑系数,选择不合适的超参数可能导致模型性能下降。
-
可能出现过拟合:由于Adam算法中引入了动量和自适应调节学习率的机制,可能导致在某些情况下发生过拟合现象。
总结
本次实验难度较小,代码只需要跑一遍即可,真正难得是把这几个优化算法彻底搞明白,搞彻底,我大概做了一个思维导图,简单对优化算法进行了总结。
参考文献
RMSprop — PyTorch 2.1 documentation
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!