【经典LeetCode算法题目专栏分类】【第5期】贪心算法:分发饼干、跳跃游戏、模拟行走机器人
《博主简介》
小伙伴们好,我是阿旭。专注于人工智能AI、python、计算机视觉相关分享研究。
?更多学习资源,可关注公-仲-hao:【阿旭算法与机器学习】,共同学习交流~
👍感谢小伙伴们点赞、关注!
分发饼干
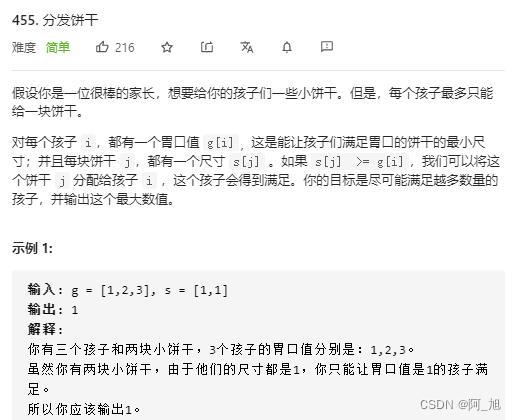
| class?Solution: ????def?findContentChildren(self,?g:?List[int],?s:?List[int])?->?int: ????????# 贪心算法 ????????res =?0 ????????g.sort() ????????s.sort() ????????i =?0 ????????j =?0 ????????while?i <?len(g)?and?j <?len(s): ????????????# 饼干满足胃口 ????????????if?g[i]?<=?s[j]: ????????????????res +=?1 ????????????????i +=?1 ????????????????j +=?1 ????????????else: ????????????# 饼干不满足胃口,查找下一个饼干 ????????????????j +=?1 ????????return?res |
跳跃游戏

| class?Solution: ????def?canJump(self,?nums:?List[int])?->?bool: ????????# 贪心算法 ????????reach_index =?len(nums)?-?1?# 表示能够到达的索引位置 ????????for?i in?range(len(nums)-1,-1,-1): ????????????# 从后往前遍历,如果满足下述条件说明能够达到当前索引 ????????????if?i +?nums[i]?>=?reach_index: ????????????????reach_index =?i ????????return?reach_index ==?0 class?Solution: ????def?canJump(self,?nums:?List[int])?->?bool: ????????if?nums ==?[0]:?return?True ????????maxDist =?0?# 能够达到的最远距离 ????????end_index =?len(nums)-1 ????????for?i,?jump in?enumerate(nums): ????????????# maxDist >= i表示能够达到当前索引位置,并且从当前索引开始 ????????????if?maxDist >=?i and?i+jump >?maxDist: ????????????????maxDist =?i+jump ????????????????if?maxDist >=?end_index: ????????????????????return?True ????????return?False |
跳跃游戏2

| class?Solution: ????def?jump(self,?nums:?List[int])?->?int: ????????end =?0??# end 表示当前能跳的边界 ????????maxPosition =?0 ????????steps =?0 ????????for?i in?range(len(nums)?-?1): ????????????# 找能跳的最远的 ????????????maxPosition =?max(maxPosition,?nums[i]?+?i);? ????????????if?i ==?end:?#遇到边界,就更新边界,并且步数加一 ????????????????end =?maxPosition; ????????????????steps +=?1 ????????return?steps; |
模拟行走机器人
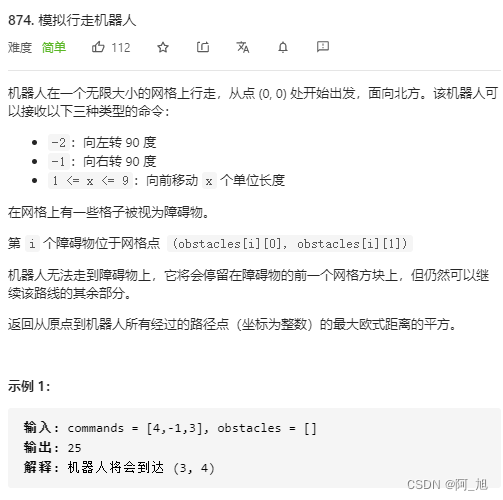
| class?Solution: ????def?robotSim(self,?commands:?List[int],?obstacles:?List[List[int]])?->?int: ????????if?not?commands: ????????????return?0 ????????# 索引0,1,2,3分别表示北,东,南,西 ????????direx =?[0,?1,?0,?-1] ????????direy =?[1,?0,?-1,?0] ????????curx,?cury,?curdire,?ans =?0,?0,?0,?0 ????????com_len,?obs_len =?len(commands),?len(obstacles) ????????obstacle_set =?{(obstacles[i][0],?obstacles[i][1])?for?i in?range(obs_len)} ?#?变为集合,使判断是否有障碍物更快 ???? ????????for?i in?range(com_len): ????????????if?commands[i]?==?-1:?# 向右转90度 ????????????????curdire =?(curdire +1)?%?4 ????????????elif?commands[i]?==?-2:?# 向左转90度 ????????????????curdire =?(curdire +?3)?%4 ????????????else:?# ?1 <= x <= 9: 向前移动x个单位长度 ????????????????for?j in?range(commands[i]): ????????????????????# 试图走出一步,并判断是否遇到了障碍物 ????????????????????nx =?curx +?direx[curdire] ????????????????????ny =?cury +?direy[curdire] ????????????????????# 当前坐标不是障碍物,计算并存储的最大欧式距离的平方做比较 ????????????????????if?(nx,?ny)?not?in?obstacle_set: ????????????????????????curx =?nx ????????????????????????cury =?ny ????????????????????????ans =?max(ans,?curx*curx +?cury*cury) ????????????????????else: ????????????????????????# 是障碍点,被挡住了,停留,智能等待下一个指令,那可以跳出当前指令了。 ????????????????????????break ????????return?ans |
关于本篇文章大家有任何建议或意见,欢迎在评论区留言交流!
觉得不错的小伙伴,感谢点赞、关注加收藏哦!
欢迎关注下方GZH:阿旭算法与机器学习,共同学习交流~
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!