ros2 基础学习16 - RQT:模块化可视化工具
RQT:模块化可视化工具
ROS中的Rviz功能已经很强大了,不过有些场景下,我们可能更需要一些简单的模块化的可视化工具,比如只显示一个摄像头的图像,使用Rviz的话,难免会觉得操作有点麻烦。
此时,我们就会用到ROS提供的另外一种模块化可视化工具——rqt。
rqt介绍
正如RQT的命名,它和Rviz一样,也是基于QT可视化工具开发而来,在使用前,我们需要通过这样一句指令进行安装,然后就可以通过rqt这个命令启动使用了。
安装
注意自己ros2 的版本,我的是humble
sudo apt install ros-humble-rqt
启动
rqt
启动成功后如图
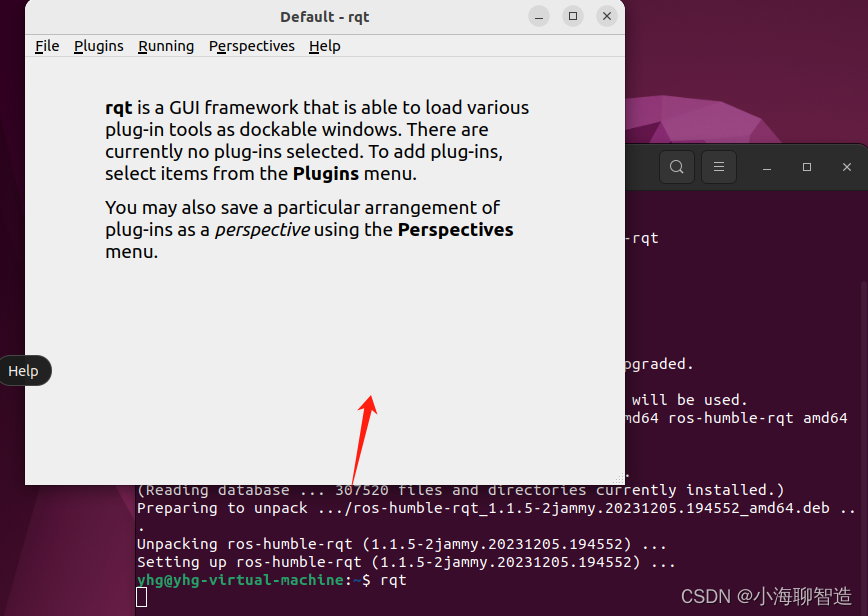
里边可以加载很多小模块,每个模块都可以实现一个具体的小功能,一些常用的功能如下:

日志显示:

也可以通过命令行方式启动
ros2 run rqt_console rqt_console
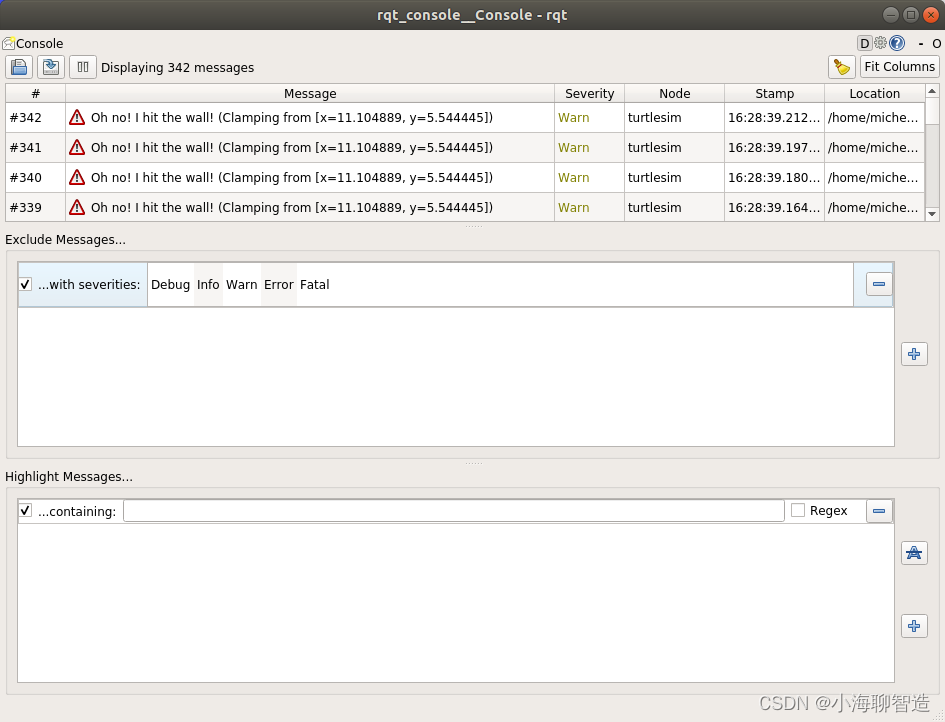
从启动的界面可以看到有三个部分
Console:
The first section of the console is where log messages from your system will display.
Exclude Message:
In the middle you have the option to filter messages by excluding severity levels. You can also add more exclusion filters using the plus-sign button to the right.
用来过滤日志等级的
Hightlight Message…:
The bottom section is for highlighting messages that include a string you input. You can add more filters to this section as well.
自定义过滤
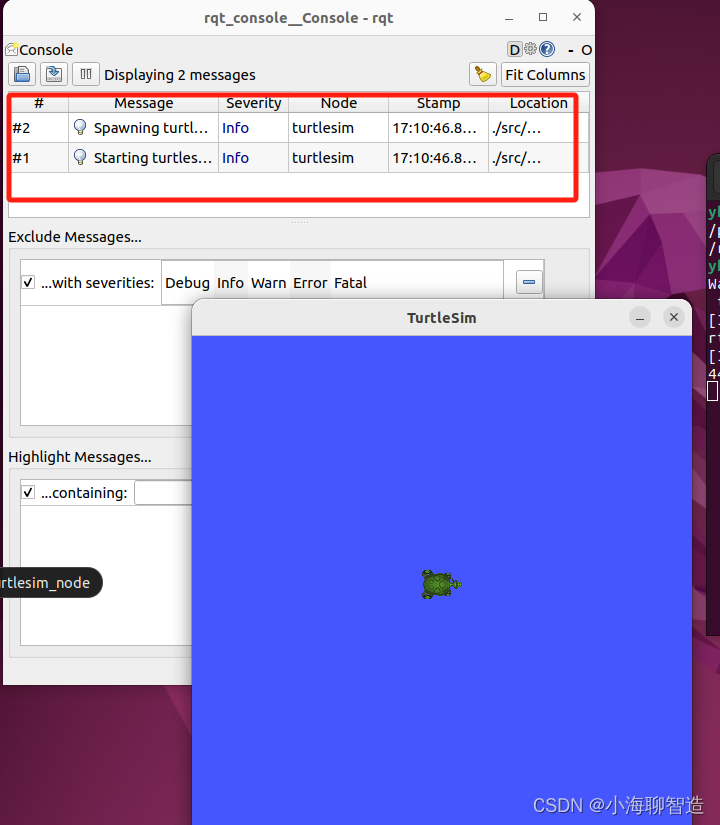
现在我们新开命令窗口,启动一个小乌龟节点
Now start turtlesim in a new terminal with the following command:
ros2 run turtlesim turtlesim_node
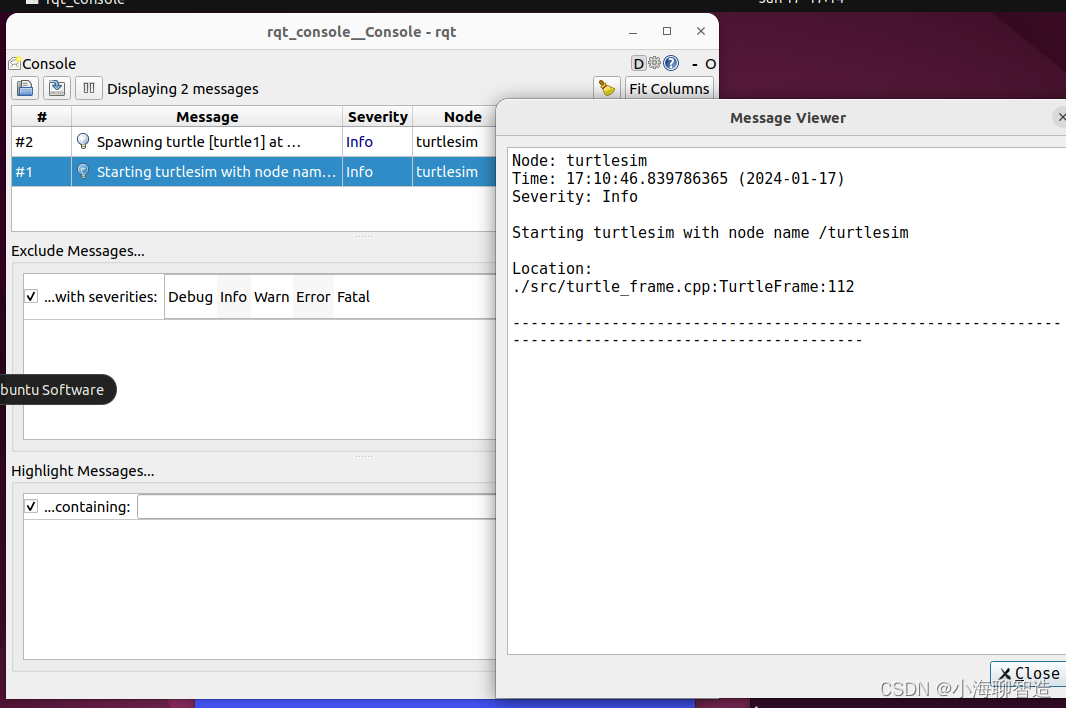
启动成功后我们会发现Console 栏中就会多两行数据,如下图所示:
双击某行日志可查看详情信息
测试定义一个不同级别日志的消息
To produce log messages for rqt_console to display, let’s have the turtle run into the wall. In a new terminal, enter the ros2 topic pub command (discussed in detail in the topics tutorial) below:
发布一条让小龟一直往前走的消息
ros2 topic pub -r 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}"
Since the above command is publishing the topic at a steady rate, the turtle is continuously running into the wall. In rqt_console you will see the same message with the Warn severity level displayed over and over, like so:
设置默认的日志等级
Set the default logger level
You can set the default logger level when you first run the /turtlesim node using remapping. Enter the following command in your terminal:
查看当前所有的topic 列表
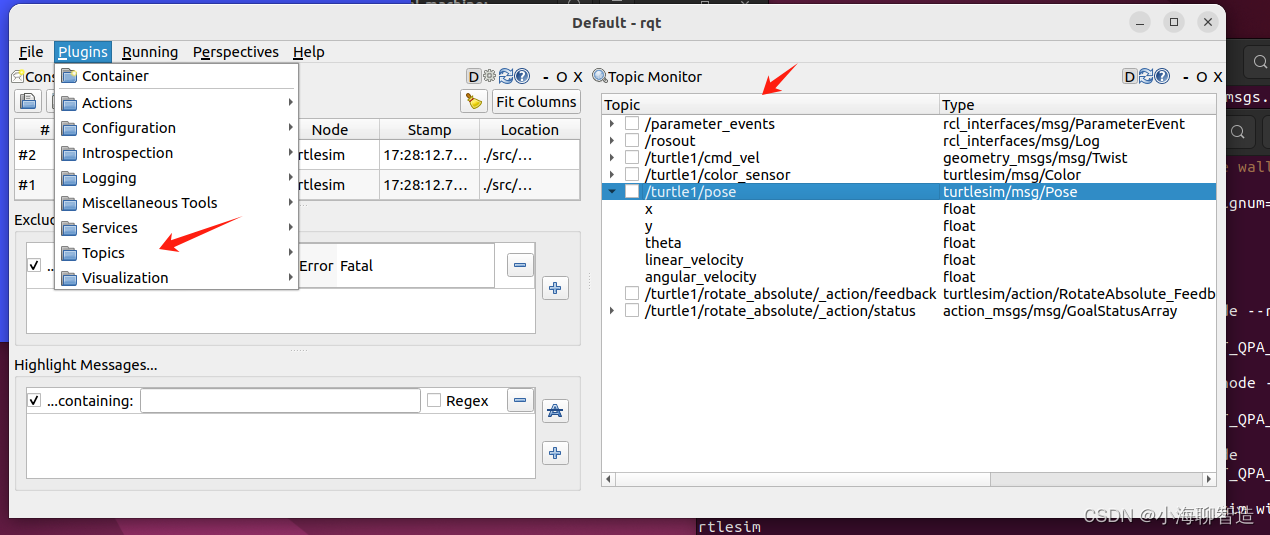
发布话题数据/调用服务请求

数据包管理

节点可视化

RQT还有好些个插件的应用,后面会慢慢的补充
参考链接:
https://docs.ros.org/en/humble/Concepts/About-RQt.html
https://docs.ros.org/en/humble/Tutorials/Beginner-CLI-Tools/Using-Rqt-Console/Using-Rqt-Console.html
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 2023年江西省职业院校技能大赛信息安全管理与评估样题
- L1-087 机工士姆斯塔迪奥(Java)
- 西瓜书读书笔记整理(九) —— 第九章 聚类
- Python循环语句
- Python面向对象初级:ADT,面向对象基本概念、类与对象成员(属性和方法)
- 海外媒体发稿:出口贸易媒体发稿推广8种方式让您事半功倍-华媒舍
- 基于 Level set 方法的医学图像分割
- 这篇Java基础快速入门学习教程,让我至少少走3个月弯路
- AI视频何时才能跑出一个“Midjourney ”?
- 极海APM035电机驱动板评测