transformer 位置编码
目录
从上面效果图可以看出,这个三角函数式位置编码满足以下四个特点:
通俗易懂的:
以下内容转自:
Transformer的位置编码_transformer 位置编码器-CSDN博客
建议看原文,本文不完整,
1. 什么是位置编码,为什么要使用位置编码
简单来说位置编码就是给一个句子中的每个token一个位置信息,通过位置编码可以明确token的前后顺序关系。
对任何语言来说,句子中词汇的顺序和位置都是非常重要的。它们定义了语法,从而定义了句子的实际语义。RNN结构本身就涵盖了单词的顺序,RNN按顺序逐字分析句子,这就直接在处理的时候整合了文本的顺序信息。
但Transformer架构抛弃了循环机制,仅采用多头自注意机制。避免了RNN较大的时间成本。并且从理论上讲,它可以捕捉句子中较长的依赖关系。
由于句子中的单词同时流经Transformer的编码器、解码器堆栈,模型本身对每个单词没有任何位置信息的。因此,仍然需要一种方法将单词的顺序整合到模型中。
想给模型一些位置信息,一个方案是在每个单词中添加一条关于其在句子中位置的信息。我们称之为“信息片段”,即位置编码。
2. 两种简单的位置编码
最容易想到两种位置编码:
(1)为每个时间步添加一个0-1范围内的数字,其中0表示第一个单词,1表示最后一个单词。
我喜欢吃洋葱 【0 0.16 0.32.....1】
我真的不喜欢吃洋葱【0 0.125 0.25.....1】
问题:我们可以看到,如果句子长度不同,那么位置编码是不一样,所以无法表示句子之间有什么相似性。
(2)1-n正整数范围分配
我喜欢吃洋葱 【1,2,3,4,5,6】
我真的不喜欢吃洋葱【1,2,3,4,5,6,7】
问题:往往句子越长,后面的值越大,数字越大说明这个位置占的权重也越大,这样的方式无法凸显每个位置的真实的权重。
3. Transformer的位置编码
可以看到上面两种简单的位置编码方式都有明显的不足,理想情况下,应满足以下标准:
每个时间步都有唯一的编码。
在不同长度的句子中,两个时间步之间的距离应该一致。
模型不受句子长短的影响,并且编码范围是有界的。(不会随着句子加长数字就无限增大)
必须是确定性的。
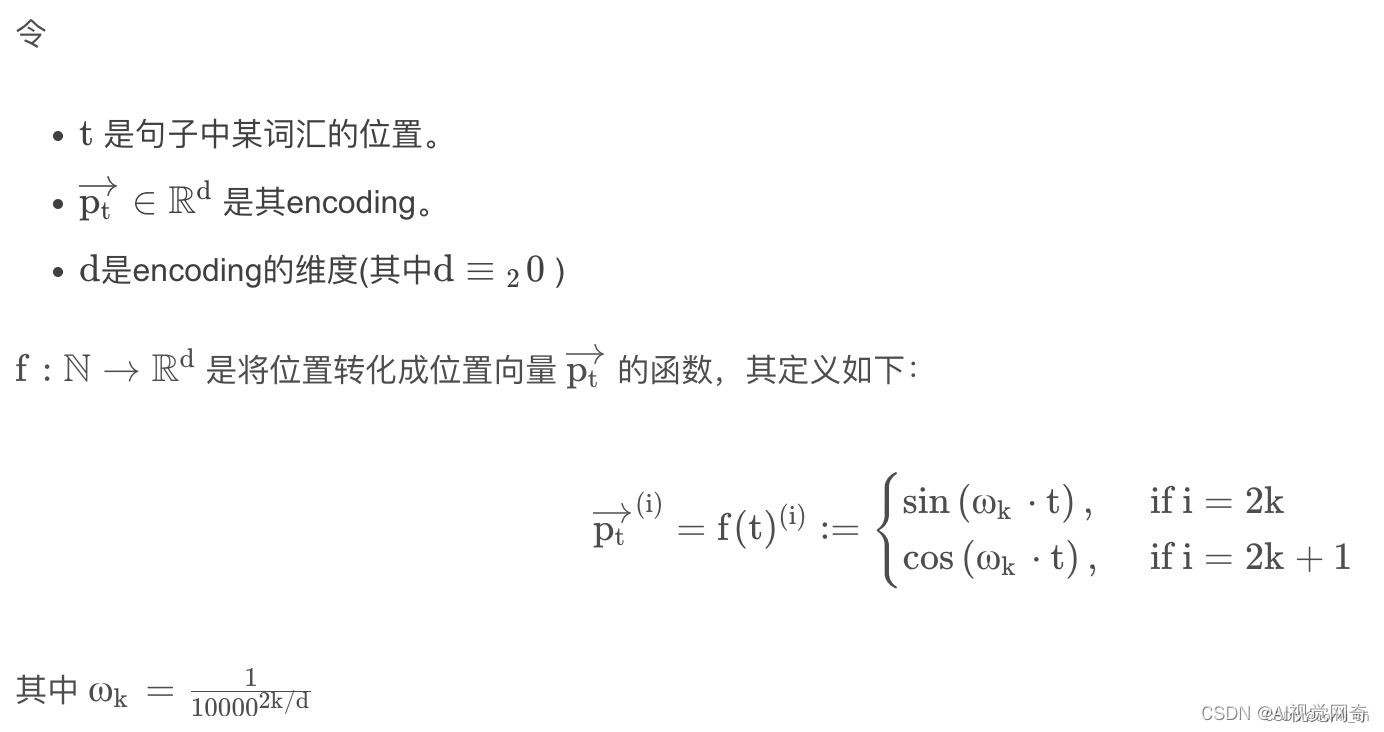
Transformer的作者设计了一种可以满足上面要求的三角函数位置编码方式。首先为每个不同位置的单词(token)单独生成一个位置向量(或者叫位置嵌入,即position embedding,缩写为PE);其次,这种编码并没有集成到模型本身中,该向量用于为每个单词提供有关其在句子中位置的信息,也就是说,其修改了模型的输入,添加了单词的顺序信息。
位置编码方式如下:
4. 为什么要使用三角函数进行位置编码
可以使得不同位置的编码向量之间有一定的规律性,比如相邻位置之间的差异较小,而距离较远的位置之间的差异较大。
这是由正弦和余弦函数的连续性和单调性保证的,即对于任意两个相邻的位置,它们对应的编码向量在每一个维度上都只有微小的变化,而对于任意两个距离较远的位置,它们对应的编码向量在每一个维度上都有较大的差异。
可以使得编码向量在任意维度上都能保持唯一性,即不同位置在同一个维度上不会有相同的值。
这是由正弦和余弦函数的周期性和相位差保证的,即对于任意两个不同的位置,它们对应的编码向量在每一个维度上都不相等。
我们假设max_len为50, d dd 取128,所以 w ww 的取值范围就是0.0001~1,t tt 的范围是0~49,所以三角函数自变量的取值范围是0~49,结果的取值范围为-1~1。则在 t tt 为0时,对应的位置编码为[0, 1, 0, 1, 0, 1, ···, 0, 1],这一点可以从下图的第一行看出来是0,1交替的。
相邻token位置编码每一位的 w ww 相同只有 t tt 相差1,由于三角函数的连续性,所以相邻token的位置编码值只有比很小的差别。
从上面效果图可以看出,这个三角函数式位置编码满足以下四个特点:
语句中每个词的位置编码是唯一的;
不同长度的句子中任意相邻两个词的间隔距离是一致的;
模型可以很容易处理更长的语句,并且值有界;
位置编码是确定性的。
原文链接:https://blog.csdn.net/comli_cn/article/details/130427510
transformer 位置编码
transformer 位置编码通俗解释
import numpy as np
import matplotlib.pyplot as plt
def getPositionEncoding(seq_len, d, n=10000):
P = np.zeros((seq_len, d))
for k in range(seq_len):
for i in np.arange(int(d/2)):
denominator = np.power(n, 2*i/d)
P[k, 2*i] = np.sin(k/denominator)
P[k, 2*i+1] = np.cos(k/denominator)
return P
P = getPositionEncoding(seq_len=4, d=4, n=100)
print(P)绝对位置和相对位置
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Maple 各版本安装指南
- 1.【Multisim仿真】数电模电学习,仿真软件的初步使用
- 陈可之油画|《诗和远方》都要去看看
- CSS基础笔记-02动画
- 【ICCV2023】MMVP:基于运动矩阵的视频预测
- K 近邻算法(K-Nearest Neighbor),简称 KNN 算法 简介
- 事关年终奖,速看!年终奖应该如何设定结构,提高激励性?
- m系列mac配置Tomcat
- ZYNQ 调用AXI WR RD ip及其代码
- Spark On Hive配置测试及分布式SQL ThriftServer配置