14.2 并发与竞争实验
一、原子操作实验
??这节使用原子操作来实现对 LED 设备的互斥访问,也就是只有一个应用程序能使用 LED。
1.1 实验程序编写
??因为是 12 章已经修改了设备树,所以这里暂时不用修改。
??在 /linux/atk-mpl/Drivers 该目录下创建 7_atomic 子目录,并且把 5_gpioled 里面的 gpioled.c 文件复制到 7_atomic 子目录下并重命名为 atomic.c,还在改子目录下创建 Vscode 工作区。首先先编写 atomic.c 程序:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#define GPIOLED_CNT 1 /* 设备号个数 */
#define GPIOLED_NAME "gpioled" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 */
/* gpioled设备结构体 */
struct gpioled_dev{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct device_node *nd; /* 设备节点 */
int led_gpio; /* led所使用的GPIO编号 */ // 此成员变量保存 LED 等所使用的 GPIO 编号
atomic_t lock; // 原子变量
};
struct gpioled_dev gpioled; /* led设备 */
/*
* @description : 打开设备
* @param - inode : 传递给驱动的inode
* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量
* 一般在open的时候将private_data指向设备结构体。
* @return : 0 成功;其他 失败
*/
static int led_open(struct inode *inode, struct file *filp)
{
/* 通过判断原子变量的值来检查LED有没有被别的应用使用 */
if (!atomic_dec_and_test(&gpioled.lock)) // 给lock减1,如果结果为0返回真否则为假,这里用了取反,所以这里是不为0为真,这里只有1和0,减一说明要么0要么-1,这里判断lock为-1才往下走
{ // 相反,lock为1,减一后为0,条件不满足不执行,这就是判断依据
atomic_inc(&gpioled.lock); // 给lock加1 /* 小于0的话就加1,使其原子变量等于0 */
retrun -EBUSY; /* LED被使用,返回忙 */
}
filp->private_data = &gpioled; /* 设置私有数据 */
return 0;
}
/*
* @description : 从设备读取数据
* @param - filp : 要打开的设备文件(文件描述符)
* @param - buf : 返回给用户空间的数据缓冲区
* @param - cnt : 要读取的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 读取的字节数,如果为负值,表示读取失败
*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{
return 0;
}
/*
* @description : 向设备写数据
* @param - filp : 设备文件,表示打开的文件描述符
* @param - buf : 要写给设备写入的数据
* @param - cnt : 要写入的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 写入的字节数,如果为负值,表示写入失败
*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{
int retvalue;
unsigned char databuf[1];
unsigned char ledstat;
struct gpioled_dev *dev = filp->private_data; // 通过读取 filp 的 private_data 成员变量来得到设备结构体变量
retvalue = copy_from_user(databuf, buf, cnt); /* 接收APP发送过来的数据 */
if(retvalue < 0) {
printk("kernel write failed!\r\n");
return -EFAULT;
}
ledstat = databuf[0]; /* 获取状态值 */
/* 调用 gpio_set_value 函数来向 GPIO 写入数据,实现开/关 LED 的效果。不需要直接操作相应的寄存器 */
if(ledstat == LEDON) {
gpio_set_value(dev->led_gpio, 0); /* 打开LED灯 */
} else if(ledstat == LEDOFF) {
gpio_set_value(dev->led_gpio, 1); /* 关闭LED灯 */
}
return 0;
}
/*
* @description : 关闭/释放设备
* @param - filp : 要关闭的设备文件(文件描述符)
* @return : 0 成功;其他 失败
*/
static int led_release(struct inode *inode, struct file *filp)
{
struct gpioled_dev *dev = filp->private_data; // 新加的,这里把私有数据给dev
/* 关闭驱动文件的时候释放原子变量 */
atomic_inc(&dev->lock);
return 0;
}
/* 设备操作函数 */
static struct file_operations gpioled_fops = {
.owner = THIS_MODULE,
.open = led_open,
.read = led_read,
.write = led_write,
.release = led_release,
};
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static int __init led_init(void)
{
int ret = 0;
const char *str;
// 1、初始化原子变量
gpioled.lock = (atomic_t)ATOMIC_INIT(0);
// 2、原子变量初始化为1
atomic_set(&gpioled.lock, 1);
/* 设置LED所使用的GPIO */
/* 1、获取设备节点:gpioled */
gpioled.nd = of_find_node_by_path("/gpioled");
if(gpioled.nd == NULL) {
printk("gpioled node not find!\r\n");
return -EINVAL;
}
/* 2.读取status属性 */
ret = of_property_read_string(gpioled.nd, "status", &str); // 获取状态是否是"okay"
if(ret < 0)
return -EINVAL;
if (strcmp(str, "okay"))
return -EINVAL;
/* 3、获取compatible属性值并进行匹配 */
ret = of_property_read_string(gpioled.nd, "compatible", &str);
if(ret < 0) {
printk("gpioled: Failed to get compatible property\n");
return -EINVAL;
}
if (strcmp(str, "alientek,led")) {
printk("gpioled: Compatible match failed\n");
return -EINVAL;
}
/* 4、 获取设备树中的gpio属性,得到LED所使用的LED编号 */
gpioled.led_gpio = of_get_named_gpio(gpioled.nd, "led-gpio", 0); // 获取 LED 所使用的 LED 编号。相当于将 gpioled 节点中的“led-gpio”属性值转换为对应的 LED 编号
if(gpioled.led_gpio < 0) {
printk("can't get led-gpio");
return -EINVAL;
}
printk("led-gpio num = %d\r\n", gpioled.led_gpio);
/* 5.向gpio子系统申请使用GPIO */
ret = gpio_request(gpioled.led_gpio, "LED-GPIO"); // 这里设备树已经改成了led-gpio=<&gpioi 0 GPIO_ACTIVE_LOW>
if (ret) {
printk(KERN_ERR "gpioled: Failed to request led-gpio\n");
return ret;
}
/* 6、设置PI0为输出,并且输出高电平,默认关闭LED灯 */
ret = gpio_direction_output(gpioled.led_gpio, 1);
if(ret < 0) {
printk("can't set gpio!\r\n");
}
/* 注册字符设备驱动 */
/* 1、创建设备号 */
if (gpioled.major) { /* 定义了设备号 */
gpioled.devid = MKDEV(gpioled.major, 0);
ret = register_chrdev_region(gpioled.devid, GPIOLED_CNT, GPIOLED_NAME);
if(ret < 0) {
pr_err("cannot register %s char driver [ret=%d]\n", GPIOLED_NAME, GPIOLED_CNT);
goto free_gpio;
}
} else { /* 没有定义设备号 */
ret = alloc_chrdev_region(&gpioled.devid, 0, GPIOLED_CNT, GPIOLED_NAME); /* 申请设备号 */
if(ret < 0) {
pr_err("%s Couldn't alloc_chrdev_region, ret=%d\r\n", GPIOLED_NAME, ret);
goto free_gpio;
}
gpioled.major = MAJOR(gpioled.devid); /* 获取分配号的主设备号 */
gpioled.minor = MINOR(gpioled.devid); /* 获取分配号的次设备号 */
}
printk("gpioled major=%d,minor=%d\r\n",gpioled.major, gpioled.minor);
/* 2、初始化cdev */
gpioled.cdev.owner = THIS_MODULE;
cdev_init(&gpioled.cdev, &gpioled_fops);
/* 3、添加一个cdev */
cdev_add(&gpioled.cdev, gpioled.devid, GPIOLED_CNT);
if(ret < 0)
goto del_unregister;
/* 4、创建类 */
gpioled.class = class_create(THIS_MODULE, GPIOLED_NAME);
if (IS_ERR(gpioled.class)) {
goto del_cdev;
}
/* 5、创建设备 */
gpioled.device = device_create(gpioled.class, NULL, gpioled.devid, NULL, GPIOLED_NAME);
if (IS_ERR(gpioled.device)) {
goto destroy_class;
}
return 0;
destroy_class:
class_destroy(gpioled.class);
del_cdev:
cdev_del(&gpioled.cdev);
del_unregister:
unregister_chrdev_region(gpioled.devid, GPIOLED_CNT);
free_gpio:
gpio_free(gpioled.led_gpio);
return -EIO;
}
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static void __exit led_exit(void)
{
/* 注销字符设备驱动 */
cdev_del(&gpioled.cdev);/* 删除cdev */
unregister_chrdev_region(gpioled.devid, GPIOLED_CNT); /* 注销设备号 */
device_destroy(gpioled.class, gpioled.devid);/* 注销设备 */
class_destroy(gpioled.class);/* 注销类 */
gpio_free(gpioled.led_gpio); /* 释放GPIO */
}
module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ALIENTEK");
MODULE_INFO(intree, "Y");??其次编写 atomicApp.c 测试文件:
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#define LEDOFF 0
#define LEDON 1
/*
* @description : main主程序
* @param - argc : argv数组元素个数
* @param - argv : 具体参数
* @return : 0 成功;其他 失败
*/
int main(int argc, char *argv[])
{
int fd, retvalue;
char *filename;
unsigned char cnt = 0;
unsigned char databuf[1];
if(argc != 3){
printf("Error Usage!\r\n");
return -1;
}
filename = argv[1];
/* 打开led驱动 */
fd = open(filename, O_RDWR);
if(fd < 0){
printf("file %s open failed!\r\n", argv[1]);
return -1;
}
databuf[0] = atoi(argv[2]); /* 要执行的操作:打开或关闭 */
/* 向/dev/gpioled文件写入数据 */
retvalue = write(fd, databuf, sizeof(databuf));
if(retvalue < 0){
printf("LED Control Failed!\r\n");
close(fd);
return -1;
}
/* 模拟占用25S LED */
while(1) {
sleep(5);
cnt++;
printf("App running times:%d\r\n", cnt);
if(cnt >= 5) break;
}
printf("App running finished!");
retvalue = close(fd); /* 关闭文件 */
if(retvalue < 0){
printf("file %s close failed!\r\n", argv[1]);
return -1;
}
return 0;
}1.2 运行测试
??编写 Makefile 文件:
KERNELDIR := /home/alientek/linux/atk-mpl/linux/my_linux/linux-5.4.31 # Linux内核源码路径
CURRENT_PATH := $(shell pwd)
obj-m := atomic.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean??编译 Makefile 文件得到 atomic.ko 文件。
make??编译 atomicApp.c 文件得到 atomicApp 文件。
arm-none-linux-gnueabihf-gcc atomicApp.c -o atomicApp??将这两个文件拷贝:
sudo cp atomicApp atomic.ko /home/alientek/linux/nfs/rootfs/lib/modules/5.4.31/??开启开发板,输入命令加载 atomic.ko 驱动:
depmod
modprobe atomic.ko![]()
??输入命令开启 LED,并且每隔 5s 都会输出 App running times:
./atomicApp /dev/gpioled 1& # “&”表示在后台运行 atomicApp 这个软件
??当在运行过程中输入以下命令的时候:
/atomicApp /dev/gpioled 0 # 关闭 LED 灯
??打开 /dev/gpioled 失败,原因是 atomicApp 软件正在占用 /dev/gpioled,如果再次运行 atomicApp 软件去操作/dev/gpioled 肯定会失败。必须等待 atomicApp运行结束,也就是25S结束以后其他软件才能去操作/dev/gpioled。这个就是采用原子变量实现一次只能有一个应用程序访问 LED 灯。?
??最后卸载驱动:
rmmod atomic.ko二、自旋锁实验
??上节是使用原子操作实现一个应用程序访问 LED,这次换成自旋锁实现。
??首先先注意自旋锁使用事项:
??① 自旋锁保护的临界区尽可能的短。使用一个变量来表示设备的使用情况,如果设备被使用了那么变量就加一,设备被释放以后变量就减 1,我们只需要使用自旋锁保护这个变量即可。
??② 考虑驱动兼容性,选择合理的 API 函数。
2.1 实验程序编写
??不用修改设备树。
??把上一节的 atomic.c、Makefiel、atomicApp.c 复制到新的子目录 8_spinlock 中,并把 atomic 相关的重命名为 spinlock,首先修改 spinlock.c 文件:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#define GPIOLED_CNT 1 /* 设备号个数 */
#define GPIOLED_NAME "gpioled" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 */
/* gpioled设备结构体 */
struct gpioled_dev{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct device_node *nd; /* 设备节点 */
int led_gpio; /* led所使用的GPIO编号 */ // 此成员变量保存 LED 等所使用的 GPIO 编号
int dev_stats; // 设备使用状态 0设备未使用 >0设备使用
spinlock_t lock; // 自旋锁
};
struct gpioled_dev gpioled; /* led设备 */
/*
* @description : 打开设备
* @param - inode : 传递给驱动的inode
* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量
* 一般在open的时候将private_data指向设备结构体。
* @return : 0 成功;其他 失败
*/
static int led_open(struct inode *inode, struct file *filp)
{
unsigned long flags; // 中断状态变量
filp->private_data = &gpioled; /* 设置私有数据 */
spin_lock_irqsave(&gpioled.lock, flags); // 保存中断状态,禁止本地中断,并获取自旋锁;这里为什么没有使用spin_lock就是考虑到兼容性
if (gpioled.dev_stats) // 如果设备被使用
{
spin_unlock_irqrestore(&gpioled.lock, flags); // 将中断状态恢复到以前的状态,并且激活本地中断,释放自旋锁
return -EBUSY;
}
gpioled.dev_stats++; // 如果设备没有使用,就让stats > 0使其使用变为使用中
spin_unlock_irqrestore(&gpioled.lock, flags); // 解锁
return 0;
}
/*
* @description : 从设备读取数据
* @param - filp : 要打开的设备文件(文件描述符)
* @param - buf : 返回给用户空间的数据缓冲区
* @param - cnt : 要读取的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 读取的字节数,如果为负值,表示读取失败
*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{
return 0;
}
/*
* @description : 向设备写数据
* @param - filp : 设备文件,表示打开的文件描述符
* @param - buf : 要写给设备写入的数据
* @param - cnt : 要写入的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 写入的字节数,如果为负值,表示写入失败
*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{
int retvalue;
unsigned char databuf[1];
unsigned char ledstat;
struct gpioled_dev *dev = filp->private_data; // 通过读取 filp 的 private_data 成员变量来得到设备结构体变量
retvalue = copy_from_user(databuf, buf, cnt); /* 接收APP发送过来的数据 */
if(retvalue < 0) {
printk("kernel write failed!\r\n");
return -EFAULT;
}
ledstat = databuf[0]; /* 获取状态值 */
/* 调用 gpio_set_value 函数来向 GPIO 写入数据,实现开/关 LED 的效果。不需要直接操作相应的寄存器 */
if(ledstat == LEDON) {
gpio_set_value(dev->led_gpio, 0); /* 打开LED灯 */
} else if(ledstat == LEDOFF) {
gpio_set_value(dev->led_gpio, 1); /* 关闭LED灯 */
}
return 0;
}
/*
* @description : 关闭/释放设备
* @param - filp : 要关闭的设备文件(文件描述符)
* @return : 0 成功;其他 失败
*/
static int led_release(struct inode *inode, struct file *filp)
{
unsigned long flags;
struct gpioled_dev *dev = filp->private_data; // 新加的,这里把私有数据给dev
/* 关闭驱动文件的时候将dev_stats减1 */
spin_lock_irqsave(&dev->lock, flags); // 上锁
if (dev->dev_stats) // dev_stats 为1成立,设备使用中
{
dev->dev_stats --; // dev_stats 为0,释放设备
}
spin_unlock_irqrestore(&dev->lock, flags);/* 解锁 */
return 0;
}
// 这里有个疑惑为什么oepn和release都要有上锁和解锁,是因为确保在同一时间只有一个进程能改变dev_stats的值,可以防止竞争的发生
/* 设备操作函数 */
static struct file_operations gpioled_fops = {
.owner = THIS_MODULE,
.open = led_open,
.read = led_read,
.write = led_write,
.release = led_release,
};
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static int __init led_init(void)
{
int ret = 0;
const char *str;
// 自旋锁初始化
spin_lock_init(&gpioled.lock);
/* 设置LED所使用的GPIO */
/* 1、获取设备节点:gpioled */
gpioled.nd = of_find_node_by_path("/gpioled");
if(gpioled.nd == NULL) {
printk("gpioled node not find!\r\n");
return -EINVAL;
}
/* 2.读取status属性 */
ret = of_property_read_string(gpioled.nd, "status", &str); // 获取状态是否是"okay"
if(ret < 0)
return -EINVAL;
if (strcmp(str, "okay"))
return -EINVAL;
/* 3、获取compatible属性值并进行匹配 */
ret = of_property_read_string(gpioled.nd, "compatible", &str);
if(ret < 0) {
printk("gpioled: Failed to get compatible property\n");
return -EINVAL;
}
if (strcmp(str, "alientek,led")) {
printk("gpioled: Compatible match failed\n");
return -EINVAL;
}
/* 4、 获取设备树中的gpio属性,得到LED所使用的LED编号 */
gpioled.led_gpio = of_get_named_gpio(gpioled.nd, "led-gpio", 0); // 获取 LED 所使用的 LED 编号。相当于将 gpioled 节点中的“led-gpio”属性值转换为对应的 LED 编号
if(gpioled.led_gpio < 0) {
printk("can't get led-gpio");
return -EINVAL;
}
printk("led-gpio num = %d\r\n", gpioled.led_gpio);
/* 5.向gpio子系统申请使用GPIO */
ret = gpio_request(gpioled.led_gpio, "LED-GPIO"); // 这里设备树已经改成了led-gpio=<&gpioi 0 GPIO_ACTIVE_LOW>
if (ret) {
printk(KERN_ERR "gpioled: Failed to request led-gpio\n");
return ret;
}
/* 6、设置PI0为输出,并且输出高电平,默认关闭LED灯 */
ret = gpio_direction_output(gpioled.led_gpio, 1);
if(ret < 0) {
printk("can't set gpio!\r\n");
}
/* 注册字符设备驱动 */
/* 1、创建设备号 */
if (gpioled.major) { /* 定义了设备号 */
gpioled.devid = MKDEV(gpioled.major, 0);
ret = register_chrdev_region(gpioled.devid, GPIOLED_CNT, GPIOLED_NAME);
if(ret < 0) {
pr_err("cannot register %s char driver [ret=%d]\n", GPIOLED_NAME, GPIOLED_CNT);
goto free_gpio;
}
} else { /* 没有定义设备号 */
ret = alloc_chrdev_region(&gpioled.devid, 0, GPIOLED_CNT, GPIOLED_NAME); /* 申请设备号 */
if(ret < 0) {
pr_err("%s Couldn't alloc_chrdev_region, ret=%d\r\n", GPIOLED_NAME, ret);
goto free_gpio;
}
gpioled.major = MAJOR(gpioled.devid); /* 获取分配号的主设备号 */
gpioled.minor = MINOR(gpioled.devid); /* 获取分配号的次设备号 */
}
printk("gpioled major=%d,minor=%d\r\n",gpioled.major, gpioled.minor);
/* 2、初始化cdev */
gpioled.cdev.owner = THIS_MODULE;
cdev_init(&gpioled.cdev, &gpioled_fops);
/* 3、添加一个cdev */
cdev_add(&gpioled.cdev, gpioled.devid, GPIOLED_CNT);
if(ret < 0)
goto del_unregister;
/* 4、创建类 */
gpioled.class = class_create(THIS_MODULE, GPIOLED_NAME);
if (IS_ERR(gpioled.class)) {
goto del_cdev;
}
/* 5、创建设备 */
gpioled.device = device_create(gpioled.class, NULL, gpioled.devid, NULL, GPIOLED_NAME);
if (IS_ERR(gpioled.device)) {
goto destroy_class;
}
return 0;
destroy_class:
class_destroy(gpioled.class);
del_cdev:
cdev_del(&gpioled.cdev);
del_unregister:
unregister_chrdev_region(gpioled.devid, GPIOLED_CNT);
free_gpio:
gpio_free(gpioled.led_gpio);
return -EIO;
}
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static void __exit led_exit(void)
{
/* 注销字符设备驱动 */
cdev_del(&gpioled.cdev);/* 删除cdev */
unregister_chrdev_region(gpioled.devid, GPIOLED_CNT); /* 注销设备号 */
device_destroy(gpioled.class, gpioled.devid);/* 注销设备 */
class_destroy(gpioled.class);/* 注销类 */
gpio_free(gpioled.led_gpio); /* 释放GPIO */
}
module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ALIENTEK");
MODULE_INFO(intree, "Y");??测试 APP 跟上节一样,把名字变成 spinlockApp.c 即可。?
2.2 运行测试
??修改 Makefile 中的
![]()
,改为 spinlock.o 即可。
??编译 spinlock.c 文件:
make??编译 spinlockApp.c 文件:
arm-none-linux-gnueabihf-gcc spinlockApp.c -o spinlockApp??把以上两个文件复制:
sudo cp spinlockApp spinlock.ko /home/alientek/linux/nfs/rootfs/lib/modules/5.4.31/??开启开发板,输入以下命令:
cd lib/modules/5.4.31/
depmod
modprobe spinlock.ko??使用 spinlockApp 进行测试驱动:
./spinlockApp /dev/gpioled 1& // 打开 LED 灯
./spinlockApp /dev/gpioled 0 // 关闭 LED 灯??驱动正常工作的话不会立马关闭 LED,会提示 file /dev/gpioled open failed!,必须等待第一个 spinlock App 软件运行完成才可以关闭。
??卸载驱动:
rmmod spinlock.ko三、信号量实验
??使用信号量来实现只能有一个应用程序访问 LED,因为信号量可以导致休眠,所以信号量保护的临界区没有运行时间限制,就可以在 open 函数申请信号量,在 release 函数中释放信号量。
3.1 实验程序编写
??不用修改设备树。
??新建 9_semaphore 文件夹,并按上一小节这样操作,只需要把 spinlock 改为 semaphore 即可。修改 semaphore.c 文件:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#define GPIOLED_CNT 1 /* 设备号个数 */
#define GPIOLED_NAME "gpioled" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 */
/* gpioled设备结构体 */
struct gpioled_dev{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct device_node *nd; /* 设备节点 */
int led_gpio; /* led所使用的GPIO编号 */ // 此成员变量保存 LED 等所使用的 GPIO 编号
struct semaphore sem; // 信号量
};
struct gpioled_dev gpioled; /* led设备 */
/*
* @description : 打开设备
* @param - inode : 传递给驱动的inode
* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量
* 一般在open的时候将private_data指向设备结构体。
* @return : 0 成功;其他 失败
*/
static int led_open(struct inode *inode, struct file *filp)
{
filp->private_data = &gpioled; /* 设置私有数据 */
if (down_interruptible(&gpioled.sem)); // 获取信号量,进入休眠以后是可以被信号打断的,这时候count为0
{
return -ERESTARTSYS;
}
/*
down(&gpioled.sem); // 获取信号量,不能被信号打断
*/
return 0;
}
/*
* @description : 从设备读取数据
* @param - filp : 要打开的设备文件(文件描述符)
* @param - buf : 返回给用户空间的数据缓冲区
* @param - cnt : 要读取的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 读取的字节数,如果为负值,表示读取失败
*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{
return 0;
}
/*
* @description : 向设备写数据
* @param - filp : 设备文件,表示打开的文件描述符
* @param - buf : 要写给设备写入的数据
* @param - cnt : 要写入的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 写入的字节数,如果为负值,表示写入失败
*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{
int retvalue;
unsigned char databuf[1];
unsigned char ledstat;
struct gpioled_dev *dev = filp->private_data; // 通过读取 filp 的 private_data 成员变量来得到设备结构体变量
retvalue = copy_from_user(databuf, buf, cnt); /* 接收APP发送过来的数据 */
if(retvalue < 0) {
printk("kernel write failed!\r\n");
return -EFAULT;
}
ledstat = databuf[0]; /* 获取状态值 */
/* 调用 gpio_set_value 函数来向 GPIO 写入数据,实现开/关 LED 的效果。不需要直接操作相应的寄存器 */
if(ledstat == LEDON) {
gpio_set_value(dev->led_gpio, 0); /* 打开LED灯 */
} else if(ledstat == LEDOFF) {
gpio_set_value(dev->led_gpio, 1); /* 关闭LED灯 */
}
return 0;
}
/*
* @description : 关闭/释放设备
* @param - filp : 要关闭的设备文件(文件描述符)
* @return : 0 成功;其他 失败
*/
static int led_release(struct inode *inode, struct file *filp)
{
struct gpioled_dev *dev = filp->private_data; // 这里把私有数据给dev
up(&dev->sem); // 释放信号量,信号量count值加1
return 0;
}
/* 设备操作函数 */
static struct file_operations gpioled_fops = {
.owner = THIS_MODULE,
.open = led_open,
.read = led_read,
.write = led_write,
.release = led_release,
};
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static int __init led_init(void)
{
int ret = 0;
const char *str;
/* 初始化信号量 */
sema_init(&gpioled.sem, 1);
/* 设置LED所使用的GPIO */
/* 1、获取设备节点:gpioled */
gpioled.nd = of_find_node_by_path("/gpioled");
if(gpioled.nd == NULL) {
printk("gpioled node not find!\r\n");
return -EINVAL;
}
/* 2.读取status属性 */
ret = of_property_read_string(gpioled.nd, "status", &str); // 获取状态是否是"okay"
if(ret < 0)
return -EINVAL;
if (strcmp(str, "okay"))
return -EINVAL;
/* 3、获取compatible属性值并进行匹配 */
ret = of_property_read_string(gpioled.nd, "compatible", &str);
if(ret < 0) {
printk("gpioled: Failed to get compatible property\n");
return -EINVAL;
}
if (strcmp(str, "alientek,led")) {
printk("gpioled: Compatible match failed\n");
return -EINVAL;
}
/* 4、 获取设备树中的gpio属性,得到LED所使用的LED编号 */
gpioled.led_gpio = of_get_named_gpio(gpioled.nd, "led-gpio", 0); // 获取 LED 所使用的 LED 编号。相当于将 gpioled 节点中的“led-gpio”属性值转换为对应的 LED 编号
if(gpioled.led_gpio < 0) {
printk("can't get led-gpio");
return -EINVAL;
}
printk("led-gpio num = %d\r\n", gpioled.led_gpio);
/* 5.向gpio子系统申请使用GPIO */
ret = gpio_request(gpioled.led_gpio, "LED-GPIO"); // 这里设备树已经改成了led-gpio=<&gpioi 0 GPIO_ACTIVE_LOW>
if (ret) {
printk(KERN_ERR "gpioled: Failed to request led-gpio\n");
return ret;
}
/* 6、设置PI0为输出,并且输出高电平,默认关闭LED灯 */
ret = gpio_direction_output(gpioled.led_gpio, 1);
if(ret < 0) {
printk("can't set gpio!\r\n");
}
/* 注册字符设备驱动 */
/* 1、创建设备号 */
if (gpioled.major) { /* 定义了设备号 */
gpioled.devid = MKDEV(gpioled.major, 0);
ret = register_chrdev_region(gpioled.devid, GPIOLED_CNT, GPIOLED_NAME);
if(ret < 0) {
pr_err("cannot register %s char driver [ret=%d]\n", GPIOLED_NAME, GPIOLED_CNT);
goto free_gpio;
}
} else { /* 没有定义设备号 */
ret = alloc_chrdev_region(&gpioled.devid, 0, GPIOLED_CNT, GPIOLED_NAME); /* 申请设备号 */
if(ret < 0) {
pr_err("%s Couldn't alloc_chrdev_region, ret=%d\r\n", GPIOLED_NAME, ret);
goto free_gpio;
}
gpioled.major = MAJOR(gpioled.devid); /* 获取分配号的主设备号 */
gpioled.minor = MINOR(gpioled.devid); /* 获取分配号的次设备号 */
}
printk("gpioled major=%d,minor=%d\r\n",gpioled.major, gpioled.minor);
/* 2、初始化cdev */
gpioled.cdev.owner = THIS_MODULE;
cdev_init(&gpioled.cdev, &gpioled_fops);
/* 3、添加一个cdev */
cdev_add(&gpioled.cdev, gpioled.devid, GPIOLED_CNT);
if(ret < 0)
goto del_unregister;
/* 4、创建类 */
gpioled.class = class_create(THIS_MODULE, GPIOLED_NAME);
if (IS_ERR(gpioled.class)) {
goto del_cdev;
}
/* 5、创建设备 */
gpioled.device = device_create(gpioled.class, NULL, gpioled.devid, NULL, GPIOLED_NAME);
if (IS_ERR(gpioled.device)) {
goto destroy_class;
}
return 0;
destroy_class:
class_destroy(gpioled.class);
del_cdev:
cdev_del(&gpioled.cdev);
del_unregister:
unregister_chrdev_region(gpioled.devid, GPIOLED_CNT);
free_gpio:
gpio_free(gpioled.led_gpio);
return -EIO;
}
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static void __exit led_exit(void)
{
/* 注销字符设备驱动 */
cdev_del(&gpioled.cdev);/* 删除cdev */
unregister_chrdev_region(gpioled.devid, GPIOLED_CNT); /* 注销设备号 */
device_destroy(gpioled.class, gpioled.devid);/* 注销设备 */
class_destroy(gpioled.class);/* 注销类 */
gpio_free(gpioled.led_gpio); /* 释放GPIO */
}
module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ALIENTEK");
MODULE_INFO(intree, "Y");??当信号量 sem 为 1 的时候表示 LED 灯还没有被使用,如果应用程序 A 要使用LED 灯,先调用 open 函数打开/dev/gpioled,这个时候会获取信号量 sem,获取成功以后 sem 的值减 1 变为 0。如果此时应用程序 B 也要使用 LED 灯,调用 open 函数打开/dev/gpioled 就会因为信号量无效(值为 0)而进入休眠状态。当应用程序 A 运行完毕,调用 close 函数关闭/dev/gpioled的时候就会释放信号量 sem,此时信号量 sem 的值就会加 1,变为 1。信号量 sem 再次有效,表示其他应用程序可以使用 LED 灯了,此时在休眠状态的应用程序 B?就会获取到信号量 sem,获取成功以后就开始使用 LED 灯。?
3.2 运行测试
??修改 Makefile 文件,跟上节一样,只不过改为 obj-m := semaphore.o。
??编译 semaphore.c 文件:
make??编译 semaphoreApp.c 文件:
arm-none-linux-gnueabihf-gcc semaphoreApp.c -o semaphoreApp??最后将以上两个文件复制:
sudo cp semaphoreApp semaphore.ko /home/alientek/linux/nfs/rootfs/lib/modules/5.4.31/???开启开发板,加载驱动:
depmod
modprobe semaphore.ko??驱动加载完成使用 semaphoreApp 测试驱动:
./semaphoreApp /dev/gpioled 1& # 打开 LED 灯
./semaphoreApp /dev/gpioled 0& # 关闭 LED 灯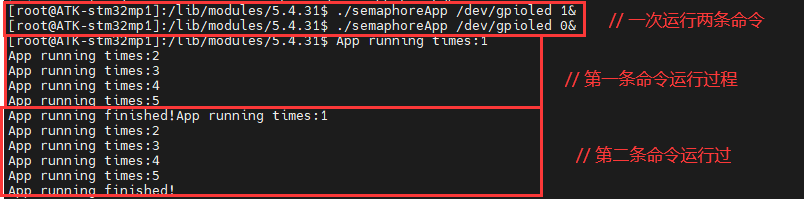
??首先,第一条命令先获取信号量,因此可以操作 LED,所以这时候开发板上面的 LED 是亮着的。第二条命令因为也想获得 LED 使用权,但是被第一条命令抢先了,所以第二条命令就休眠,等到第一条命令完成的时候,释放信号量,第二条命令才能拥有 LED 使用权,这时候发现开发板的 LED 是灭的。总共开发板前 25s 亮,后 25s 灭。
??卸载驱动:
rmmod semaphore.ko四、互斥体实验
??其实最适合互斥的就是互斥体 mutex。怎么感觉在说废话。
4.1 实验程序编写
??不用修改设备树。
??跟上节一样的操作,全部改为 mutex。对了,每次记得添加头文件路径,修改 mutex.c 文件:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#define GPIOLED_CNT 1 /* 设备号个数 */
#define GPIOLED_NAME "gpioled" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 */
/* gpioled设备结构体 */
struct gpioled_dev{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct device_node *nd; /* 设备节点 */
int led_gpio; /* led所使用的GPIO编号 */ // 此成员变量保存 LED 等所使用的 GPIO 编号
struct mutex lock; // 定义互斥体
};
struct gpioled_dev gpioled; /* led设备 */
/*
* @description : 打开设备
* @param - inode : 传递给驱动的inode
* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量
* 一般在open的时候将private_data指向设备结构体。
* @return : 0 成功;其他 失败
*/
static int led_open(struct inode *inode, struct file *filp)
{
filp->private_data = &gpioled; /* 设置私有数据 */
if (mutex_lock_interruptible(&gpioled.lock)) // 获取互斥体,可以被信号打断
{
return -ERESTARTSYS;
}
/*
mutex_lock(&gpioled.lock); // 获取信号量,不能被信号打断
*/
return 0;
}
/*
* @description : 从设备读取数据
* @param - filp : 要打开的设备文件(文件描述符)
* @param - buf : 返回给用户空间的数据缓冲区
* @param - cnt : 要读取的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 读取的字节数,如果为负值,表示读取失败
*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{
return 0;
}
/*
* @description : 向设备写数据
* @param - filp : 设备文件,表示打开的文件描述符
* @param - buf : 要写给设备写入的数据
* @param - cnt : 要写入的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 写入的字节数,如果为负值,表示写入失败
*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{
int retvalue;
unsigned char databuf[1];
unsigned char ledstat;
struct gpioled_dev *dev = filp->private_data; // 通过读取 filp 的 private_data 成员变量来得到设备结构体变量
retvalue = copy_from_user(databuf, buf, cnt); /* 接收APP发送过来的数据 */
if(retvalue < 0) {
printk("kernel write failed!\r\n");
return -EFAULT;
}
ledstat = databuf[0]; /* 获取状态值 */
/* 调用 gpio_set_value 函数来向 GPIO 写入数据,实现开/关 LED 的效果。不需要直接操作相应的寄存器 */
if(ledstat == LEDON) {
gpio_set_value(dev->led_gpio, 0); /* 打开LED灯 */
} else if(ledstat == LEDOFF) {
gpio_set_value(dev->led_gpio, 1); /* 关闭LED灯 */
}
return 0;
}
/*
* @description : 关闭/释放设备
* @param - filp : 要关闭的设备文件(文件描述符)
* @return : 0 成功;其他 失败
*/
static int led_release(struct inode *inode, struct file *filp)
{
struct gpioled_dev *dev = filp->private_data; // 这里把私有数据给dev
mutex_unlock(&dev->lock); // 释放互斥锁
return 0;
}
/* 设备操作函数 */
static struct file_operations gpioled_fops = {
.owner = THIS_MODULE,
.open = led_open,
.read = led_read,
.write = led_write,
.release = led_release,
};
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static int __init led_init(void)
{
int ret = 0;
const char *str;
/* 初始化互斥体 */
mutex_init(&gpioled.lock);
/* 设置LED所使用的GPIO */
/* 1、获取设备节点:gpioled */
gpioled.nd = of_find_node_by_path("/gpioled");
if(gpioled.nd == NULL) {
printk("gpioled node not find!\r\n");
return -EINVAL;
}
/* 2.读取status属性 */
ret = of_property_read_string(gpioled.nd, "status", &str); // 获取状态是否是"okay"
if(ret < 0)
return -EINVAL;
if (strcmp(str, "okay"))
return -EINVAL;
/* 3、获取compatible属性值并进行匹配 */
ret = of_property_read_string(gpioled.nd, "compatible", &str);
if(ret < 0) {
printk("gpioled: Failed to get compatible property\n");
return -EINVAL;
}
if (strcmp(str, "alientek,led")) {
printk("gpioled: Compatible match failed\n");
return -EINVAL;
}
/* 4、 获取设备树中的gpio属性,得到LED所使用的LED编号 */
gpioled.led_gpio = of_get_named_gpio(gpioled.nd, "led-gpio", 0); // 获取 LED 所使用的 LED 编号。相当于将 gpioled 节点中的“led-gpio”属性值转换为对应的 LED 编号
if(gpioled.led_gpio < 0) {
printk("can't get led-gpio");
return -EINVAL;
}
printk("led-gpio num = %d\r\n", gpioled.led_gpio);
/* 5.向gpio子系统申请使用GPIO */
ret = gpio_request(gpioled.led_gpio, "LED-GPIO"); // 这里设备树已经改成了led-gpio=<&gpioi 0 GPIO_ACTIVE_LOW>
if (ret) {
printk(KERN_ERR "gpioled: Failed to request led-gpio\n");
return ret;
}
/* 6、设置PI0为输出,并且输出高电平,默认关闭LED灯 */
ret = gpio_direction_output(gpioled.led_gpio, 1);
if(ret < 0) {
printk("can't set gpio!\r\n");
}
/* 注册字符设备驱动 */
/* 1、创建设备号 */
if (gpioled.major) { /* 定义了设备号 */
gpioled.devid = MKDEV(gpioled.major, 0);
ret = register_chrdev_region(gpioled.devid, GPIOLED_CNT, GPIOLED_NAME);
if(ret < 0) {
pr_err("cannot register %s char driver [ret=%d]\n", GPIOLED_NAME, GPIOLED_CNT);
goto free_gpio;
}
} else { /* 没有定义设备号 */
ret = alloc_chrdev_region(&gpioled.devid, 0, GPIOLED_CNT, GPIOLED_NAME); /* 申请设备号 */
if(ret < 0) {
pr_err("%s Couldn't alloc_chrdev_region, ret=%d\r\n", GPIOLED_NAME, ret);
goto free_gpio;
}
gpioled.major = MAJOR(gpioled.devid); /* 获取分配号的主设备号 */
gpioled.minor = MINOR(gpioled.devid); /* 获取分配号的次设备号 */
}
printk("gpioled major=%d,minor=%d\r\n",gpioled.major, gpioled.minor);
/* 2、初始化cdev */
gpioled.cdev.owner = THIS_MODULE;
cdev_init(&gpioled.cdev, &gpioled_fops);
/* 3、添加一个cdev */
cdev_add(&gpioled.cdev, gpioled.devid, GPIOLED_CNT);
if(ret < 0)
goto del_unregister;
/* 4、创建类 */
gpioled.class = class_create(THIS_MODULE, GPIOLED_NAME);
if (IS_ERR(gpioled.class)) {
goto del_cdev;
}
/* 5、创建设备 */
gpioled.device = device_create(gpioled.class, NULL, gpioled.devid, NULL, GPIOLED_NAME);
if (IS_ERR(gpioled.device)) {
goto destroy_class;
}
return 0;
destroy_class:
class_destroy(gpioled.class);
del_cdev:
cdev_del(&gpioled.cdev);
del_unregister:
unregister_chrdev_region(gpioled.devid, GPIOLED_CNT);
free_gpio:
gpio_free(gpioled.led_gpio);
return -EIO;
}
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static void __exit led_exit(void)
{
/* 注销字符设备驱动 */
cdev_del(&gpioled.cdev);/* 删除cdev */
unregister_chrdev_region(gpioled.devid, GPIOLED_CNT); /* 注销设备号 */
device_destroy(gpioled.class, gpioled.devid);/* 注销设备 */
class_destroy(gpioled.class);/* 注销类 */
gpio_free(gpioled.led_gpio); /* 释放GPIO */
}
module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ALIENTEK");
MODULE_INFO(intree, "Y");4.2 运行测试
??修改 Makefile ,mutex.o。
??编译 mutex.c 文件和 mutexApp.c 文件:
make
arm-none-linux-gnueabihf-gcc mutexApp.c -o mutexApp??上面两个文件复制到:?
sudo cp mutexApp mutex.ko /home/alientek/linux/nfs/rootfs/lib/modules/5.4.31/??加载驱动:
depmod
modprobe mutex.ko??使用 mutexApp 测试驱动: ?
./mutexApp /dev/gpioled 1& # 打开 LED 灯
./mutexApp /dev/gpioled 0& # 关闭 LED 灯??跟信号量的效果一样。卸载驱动:
rmmod mutex.ko本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 2023那些振奋人心的中国科技成果
- Meta 新推出的实时语音翻译模型 Seamless
- 一文搞懂设计模式值适配器模式
- 两种隔离策略
- vivado 错误路径
- 成为UI界面设计的高高手,UI设计高手持续进阶之路
- Pandas实战100例 | 案例 40: 分组并应用多个聚合函数
- JMeter请求参数Parameters,带中文或特殊字符(+/=)时,例如登录密码或者token等,需要勾选编码
- 关于C#中的LINQ的延迟执行
- 安卓之视频智能字幕的应用场景以及各种技术优劣分析