矿山无人驾驶方案
发布时间:2024年01月11日
矿山无人驾驶运输系统,可实现露天矿采煤装载运输的无人化,满足智能矿山安全、高效、绿色、环保等目标。
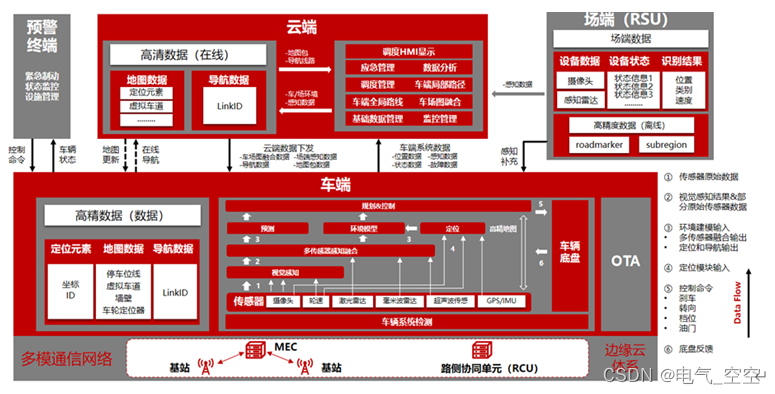
无人驾驶应用的总体技术架构包括“车端、场端、云端”三个层面以及相应的安全保障体系,其中车端的智能矿卡具备车辆感知、通信、决策和执行等能力,与其他设施之间基于5G、C-V2X多模车联网实现通讯传输,云端的调度管理平台具备协同控制、路径规划等能力,场端高精度传感设备与相应的安全保障体系共同确保智能矿卡无人驾驶应用能够安全可靠运行。
智能矿卡包括车体和车载智能化设备,智能化设备包括5G/C-V2X通信终端、摄像头、激光雷达、毫米波雷达、车载定位、车载计算平台等设备,能够实现信息传输、环境感知和智能决策等功能,例如,摄像头、激光雷达等传感设备能够进行环境融合感知,并完成障碍物检测,而车载高精度定位系统则采用融合定位方法以满足不同环境下的定位需求。
车联网基于5G和C-V2X系统实现车与车、车与路、车与云平台的信息传输。5G系统包括基站、核心网等部分,支持实现车和云平台之间控制数据、状态数据的传输。V2X直连通信主要实现车与车之间、车与路之间关于车辆状态、道路状态等数据的传输。
云平台实现矿山运输场景信息的融合分析,构建矿山运输作业模型,面向不同应用场景提供作业调度、路径规划、联合决策和协同控制,可以实现自动驾驶的业务管理,同时作为应用总入口,承接各类信息回传和指令下发,并为业务规划网络路径。
文章来源:https://blog.csdn.net/weixin_45905610/article/details/135534842
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【视野提升】ChatGPT的系统是如何工作的?
- HAproxy群集
- 力扣(leetcode)第80题删除有序数组中的重复项 II(Python)
- Android 13 关闭相册的编辑功能
- 抖店做不起来?新手常见起店失败问题总结,看下你中了几条?
- 电动工具直流调速专用集成电路GS069,具有电源电压范围宽、功耗小、抗干扰能力强等特性
- 股权融资的四种方式(下)
- EMC整改业务
- 什么是 JavaScript 中的 WeakMap
- 压力应变电桥信号隔离放大变送器差分输入变送直流模块0-10mV/0-20mV/0-±10mV/0-±20mV转0-5V/0-10V/4-20mA