4D 毫米波雷达:智驾普及的新路径(一)
发布时间:2024年01月15日
1 4D 毫米波
1.1 什么是 4D 毫米波雷达?
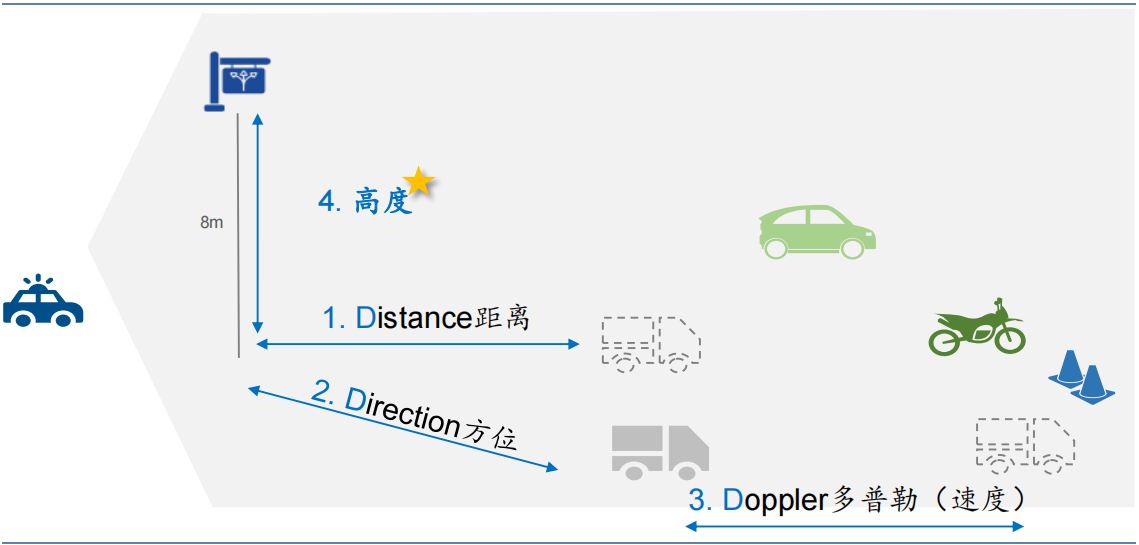
????????4D 毫米波雷达是传统毫米波雷达的升级版,
4D
指的是速度、距离、水平角度、垂直高度
四个维度。
相比传统
3D
毫米波雷达,
4D
毫米波雷达增加了
“
高度
”的探测,将第四个维度整合到传统毫米波雷达中,这使得
4D
毫米波雷达
1)获取信息的维度更加丰富,可以测量俯仰角度,且角度分辨率可以达到
1
度左右;
2
)探测距离更长,最远探测距离可达
300 多米;
3)目标点云更密集,可以形成点云成像级的输出,进而可以使用数据驱动的方式进行图像识别。总体而言,4D 毫米波雷达具有更佳的探测能力,更高的分辨率和精度,在人工智能技术的加持下,能够实现更加智能化的感知和跟踪,从而为自动驾驶、智能交通等领域提供更加可靠的数据支持。目前,特斯拉
Hardware4.0 或将从纯摄像头的视觉方案回归到
4D
毫米波雷达的视觉方案,国内的上汽飞凡
R7
、飞凡
F7
、深蓝
SL03
都已经搭载了 4D毫米波雷达,
4D
毫米波雷达正在成为自动驾驶系统传感器的“明日之星”。
图表
1
:
4D
毫米波雷达的涵义
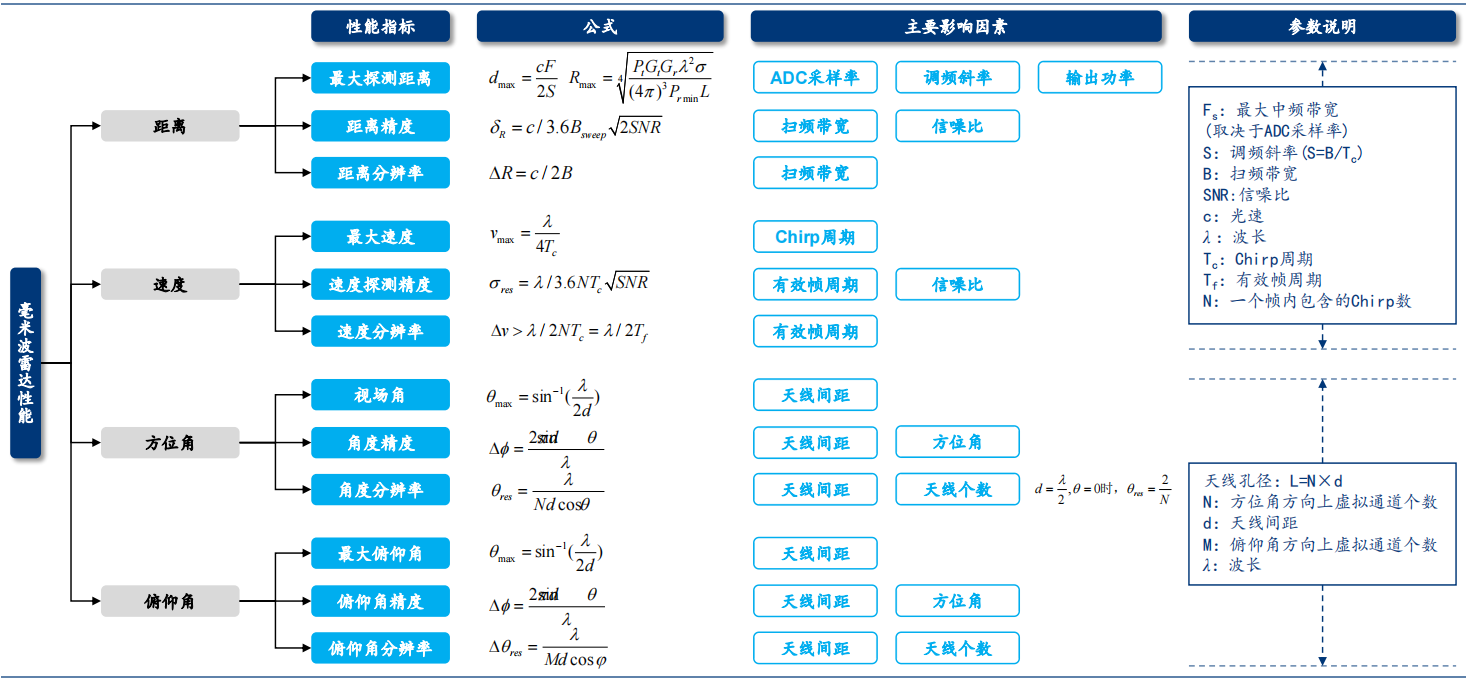
????????4D 毫米波雷达探测性能包括距离、速度、方位角、俯仰角四个方面:
????????1) 在距离探测中,主要性能指标包括最大探测距离、距离精度、距离分辨率,主要影响因素是
ADC
采样率、调频斜率、输出功率、扫频带宽和信噪比等。
????????2) 在速度探测中,主要性能指标包括最大探测速度、速度精度、速度分辨率,主要影响因素是
Chirp
周期、有效帧周期和信噪比等。
????????3) 在方位角探测中,主要性能指标包括视场角、角度精度、角度分辨率,主要影响因素是天线间距、方位角和天线个数等。
????????4) 在俯仰角探测中,主要性能指标包括最大俯仰角、俯仰角精度和俯仰角分辨率;主要影响因素是天线间距、方位角和天线个数等。
????????4D 毫米波雷达测距三大指标、测速三大指标由雷达“一个帧的基本参数”决定。雷达性能
受限于毫米波、模拟电路的性能、处理能力等因素。
????????毫米波雷达测速和测距性能进步主要取决于 MMIC
芯片本身性能提升。对于
4D 毫米波雷达而言,最大探测距离主要受限于
ADC 采样率、调频斜率、输出功率、系统设计等因素,这些与
MMIC 芯片本身性能、设计息息相关;距离精度和速度精度主要取决于毫米波雷达系统信噪比的提升,系统信噪比主要受到
MMIC 芯片的噪声系数、相位噪声等指标的影响。因此,
MMIC
芯片的各类参数对于距离和速度的探测质量至关重要。
????????天线的口径决定雷达的角度分辨率,因此,天线的间距、设计方式(
级联
/
单芯片
)对于角度探测质量至关重要。
图表
2
:
4D
毫米波雷达的四大维度及主要影响因素
1.2 回顾:4D 发展到了哪个阶段?
????????目前,4D
毫米波雷达主流产品一般采用
2
片或
4
片
MMIC
级联的技术方案,也有部分厂
商采用单芯片集成的技术方案。
其中,
4
片级联的
4D
毫米波雷达最为主流,它具有
12 个发射天线,
16
个接收天线
(12
发
16
收
)
,
192
个通道,其方位和俯仰皆可达到
1 度左右的分辨率,理论上可以达到
0.1
的精度,最远探测距离可达
300 多米,代表性生产商有德国大陆、
采埃孚、麦格纳、安波福和博世。
2021
年,华为在上海车展发布
12
发
24
收的 4D毫米波雷达,采用
4
片
3
发
6
收的芯片级联而成。以色列公司
vayyar 采用单芯片技术方案,通过密集天线阵列来实现更高、更好的效果,推出了
24
发
24
收,
576
通道的
4D 毫米波雷达。以色列雷达供应商
Arbe
研制了目前最大的
48
发、
48
收、
2304
通道的 4D 毫米波雷达,配合其自研专用处理器芯片,大大提升了毫米波雷达系统的角度分辨率。
图表
3
: 毫米波雷达主流产品进展

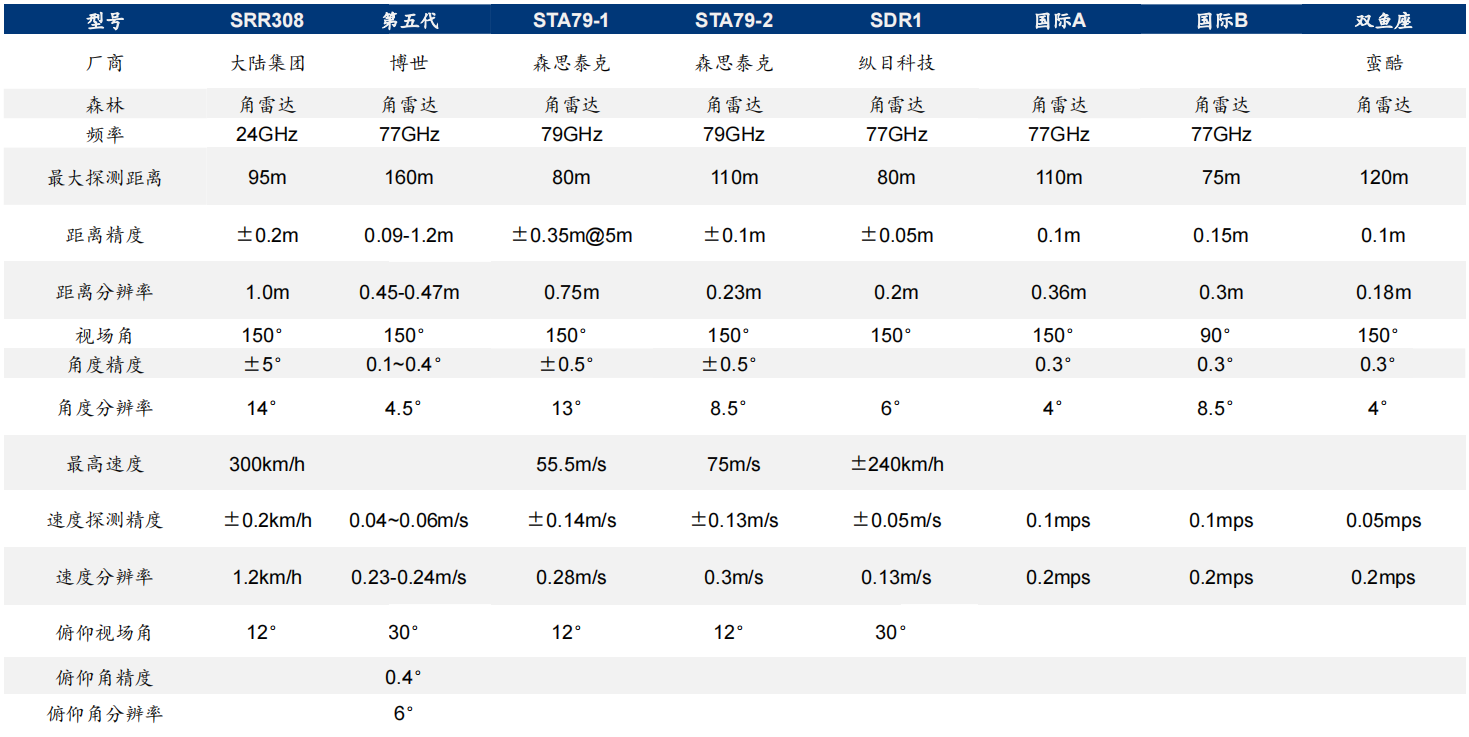
????????毫米波按照安装位置分可分为前向雷达与角雷达。已有部分厂商在前向雷达产品中引入俯仰维度。目前,大陆集团的
ARS540
,博世的第五代、森思泰克的
STA77-6、福瑞泰克的FVR40 等产品都支持俯仰角度探测,其中在分辨率上,性能较高的毫米波雷达产品是福瑞泰克的
FVR40
,支持
1
度的角度分辨率;在精度上,性能较高的产品是大陆集团的
ARS540,可以达到
0.1
度的角度精度。在这些毫米波雷达中,最远探测距离可达 300 米。角雷达的性能要求没有前向雷达苛刻。博世的第五代引入了俯仰维度,但其角度分辨率较差,且最大探测距离为
160
米。我们认为,随着智能驾驶技术的不断发展,
4D 毫米波雷达的性能或将得到进一步的优化,渗透率有望提升。
图表
4
: 各公司前向毫米波雷达对比

图表
5
: 各公司角毫米波雷达对比
1.3 展望:毫米波还有多少想象空间?
????????我们认为,4D
毫米波雷达未来的发展趋势是成本
/
雷达尺寸
/
功耗的下降与产品性能的提升。
????????1) 成本方面:
Yole
预测,
4D
成像雷达当前的成本约为
300
美元,未来的成本目标是 100美元。我们认为,
4D
毫米波雷达成本的下降或将主要来自于:①设计层面,CMOS工艺的改进、天线封装技术的优化、
MCU+DSP
在
SoC 上的系统集成;以及②工程层面,技术成熟度提升,规模效益带来的成本摊薄。
????????2) 尺寸方面:
Yole
认为,可接受的
4D
毫米波前向雷达的尺寸为
11*11*3cm,角雷达的尺寸为
6*7*2cm。车载毫米波雷达的尺寸受限,我们认为通过算法的优化、天线内置等方式可以在保障性能的前提下,压缩尺寸,便于车企进行灵活的设计安装。
????????3) 功耗方面:
Yole
测算,
4D
毫米波雷达当前功耗约为
20W。但考虑到车载传感器、通信模块数量的增加,单颗功耗下降或将便于整车系统设计。
Yole
预测,
4D 毫米波雷达单颗功耗有望降至
10W
以下。随着汽车电气化的发展,设备的功耗将变得愈发重要。
????????此外,4D
毫米波雷达的灵活性与可扩展性,多目标检测的能力也有望得到提升。
图表
6
:
4D
毫米波雷达的发展路径

????????毫米波雷达始终在寻求性能与成本的平衡。我们可以将毫米波雷达的发展拆分成成本
/性能两个驱动力的相互作用:
????????1)成本驱动
(从基于
GaAs
的传统雷达到基于
CMOS 的单芯片集成方案):探寻了成本最优解。为了降低成本,采用了硬件集成、
CMOS 工艺转换,工艺改进的同时提高了雷达的性能表现。
????????2)性能驱动
(从
CMOS
单芯片集成到
4D 成像雷达):为了最优化雷达的性能表现,级联,CMOS 成为主流;算法优化;信号收发虚拟通道数量提高;点云密度提升,部分成像级雷达像素升级到
2k
。毫米波雷达的复杂度与成本均有所上升。
????????我们认为,4D 成像毫米波雷达或将进入新一轮的成本驱动发展阶段。在物理设计、天线性能设计、电连接、封装工艺和材料、散热处理、可靠性与自动化测试等方面进行持续优化,推出可大规模量产的高性能毫米波雷达解决方案。
图表
7
:
4D
毫米波雷达的发展路径

????????从市场空间的角度看,全球毫米波雷达市场增长潜力大。根据
Yole
,
2021 年全球毫米波雷达市场规模为
58
亿美元;其中标准
/4D/
成像
/COMS
毫米波雷达分别为
54/3/<1/<1 亿美元;预计到
2027
年全球毫米波雷达市场规模有望到达
128
亿美元;
2021-2027E
的
CAGR 为14%
;其中标准
/4D/
成像
/COMS
毫米波雷达分别为
45/35/43/5
亿元,
2021-2027E
的 CAGR分别
-3/48/109/119%
图表
8
: 毫米波雷达市场规模

2 4D 毫米波 vs 其它传感器
2.1 技术上看,替代还是互补?
????????我们认为性能上看,4D
毫米波雷达未来或可在分辨率上逼近
16-64
线的激光雷达。
4D毫米波相较于激光雷达的主要优缺点有:
????????优点:1
)不受天气影响。毫米波的分辨率越高,穿透能力越强、大气衰减小、受雨雪烟尘等天气影响小,故而毫米波雷达具有全天时全天候的工作能力。
2
)测速。可通过多普勒效应直接测速,并且测速精度较高,可以对摄像头等其他传感器形成互补。
3
)成本低。4D毫米波雷达主流方案是基于硅基的
CMOS
,成本较激光雷达更低。
4
)测距长。
4D 毫米波雷达可实现
300m
甚至更远范围的覆盖,激光雷达一般感知距离在
210-250m
左右;
5
)穿
透性强在一些场景上表现更优。
例如理论上可以直接通过穿透实现对前前车的识别与探测。
????????缺点:1
)性能不及激光雷达。
目前
4D
毫米波雷达的方位角
*
俯仰角分辨率
1 *1 度左右;激光雷达可达到
0.1*0.1
度。
2
)多普勒效应的局限性。在对横向移动的物体、距离较近的两辆车、人车等场景的识别上尚存在缺陷。
????????基于毫米波雷达/
激光雷达分别在全天候工作能力
/对物体的精准检测识别等方面有一定程度的不可替代性,
我们认为长期来看,在自动驾驶、高级别辅助驾驶阶段,
4D
毫米波雷达
与激光雷达并非替代关系。另一方面,如何实现感知层的前融合、算法处理能力的提升或将是激光雷达、
4D 毫米波雷达充分发挥技术优势,将“科技感”、“安全感”转化为自动驾驶性能提升的关键。
????????短期考虑低阶辅助驾驶对传感器性能的要求较低、主机厂的降本压力较大,4D
毫米波雷达
或将率先实现规模化量产上车。
图表
9
: 传感器性能对比

2.2 成本上看,共生还是共灭?
????????从单个传感器的角度看:
????????毫米波雷达的成本区间大致为 30-80
美元,
4D
毫米波雷达的成本约为
300
美元。硬件 BOM拆分:射频前端
MMIC
(包括发射、接收、及信号处理器)的成本约占
50%
、
PCB(包括接收、发射天线)的成本约占
20%
、
DSP/FPGA
的成本约占
20%
;其它硬件成本约占
10%
。
????????由此可见,MMIC
芯片与天线是
4D
毫米波雷达成本的重要组成部分,也是未来降本的关键
领域。
图表
10
: 各公司毫米波雷达主流产品成本及拆分

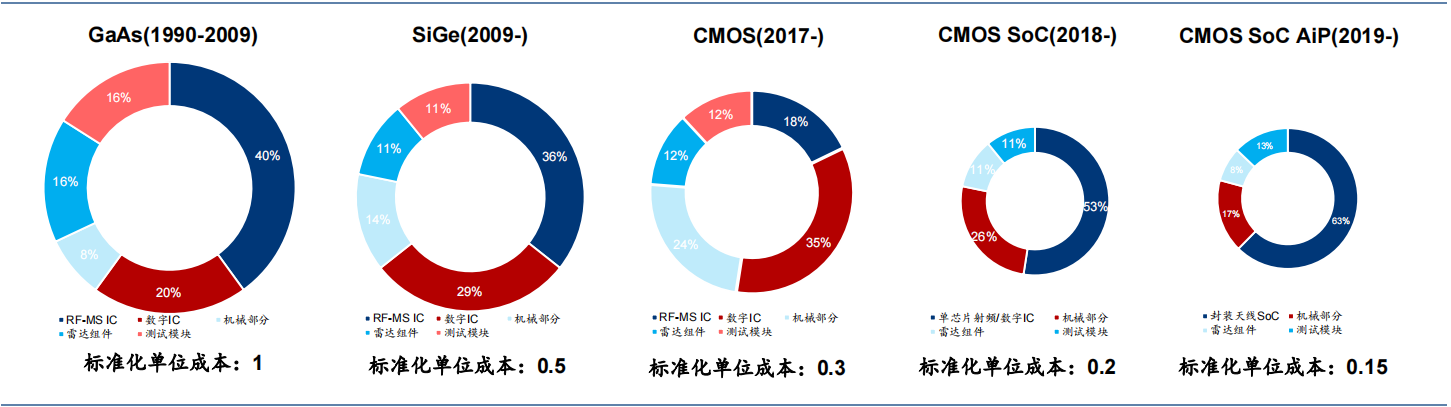
????????根据加特兰微电子在接受 EET
的采访时表示,毫米波雷达成本在
CMOS SoC+AiP 的技术下可实现大幅缩减,较
CMOS SoC/CMOS/SiGe/GaAs
方案分别节约
25/50/70/85%
的成本。
图表
11
: 毫米波雷达成本在
CMOS SoC+AiP
的技术下可实现大幅缩减
????????考虑到车企对智能驾驶配置的选择决策不单依赖于某一种传感器的价格,而是综合考虑整个智能驾驶硬件
BOM 成本、自动驾驶数据采集的长远诉求、以及品牌形象定位。我们对智能驾驶硬件的
BOM
进行拆解。
????????从整个智能驾驶硬件 BOM
的角度看:
????????我们基于市面上主流高级别辅助驾驶的硬件配置成本测算1。当前各品牌旗舰车型智能驾驶硬件的平均总成本为
10,531
元;其中激光雷达占
26.8%
、摄像头占
24.4%、毫米波雷达占17.6%
、芯片占
11.6%
、高精度地图与定位占
10.2%
、
V2X
占
5.7%
、超声波雷达占
3.7%。
图表
12
:
L2/L2+
智能驾驶
BOM
成本拆分

3 4D 毫米波的市场规模测算
????????1) 汽车销量:
根据公安部
2022
年
3
月数据,我国千人汽车保有量约为 210 辆,距离发达国家每千人四百辆的汽车保有量仍有差距。叠加经济复苏等宏观因素向好,我们预测2022-2030
年中国新能源汽车销量的
CAGR
为
20%
;整体汽车销量的
CAGR
为
2%,维持低个位数增长。
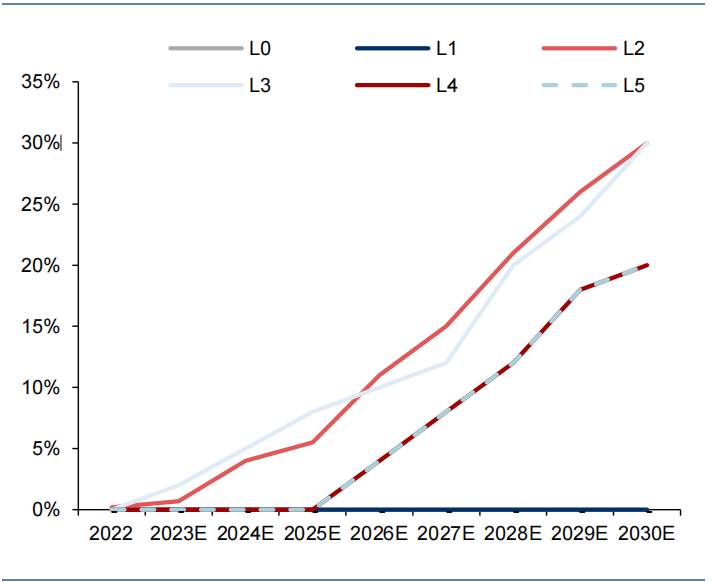
????????2) 智能驾驶:乘用车
L2
级辅助驾驶将成为标配。
考虑到
L3 级以上级别自动驾驶所面临的法规、权责、以及技术长尾问题,我们预测
2025
年之前,辅助驾驶配置向 L2/L2+级别升级(
ADAS
)将是大规模商业化落地的主要方向。具体而言,我们预测
L0/L1 级车型将向
L2
升级,
L2
以下级别渗透率将由
2021
年的
71.6%
下降到
2030
年的
29.3%,而
L2
级别智能驾驶渗透率将由
2021
年的
28.4%
上升至
2030
年的
59.9%
,
L3 及以上级别智能驾驶取得一定的突破。
????????3)
4D
毫米波雷达:受汽车智能化趋势的影响,
我们预测
2030
年中国
4D
毫米波雷达市场
规模有望达到
449
亿元。
图表
13
: 中国汽车销量预测
-
分智驾级别

图表
14
:
4D
毫米波雷达渗透率预测
-
分智驾级别
图表
15
: 中国
4D
毫米波雷达市场规模预测

文章来源:https://blog.csdn.net/weixin_41691854/article/details/135590039
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 物奇平台消息发收功能实现
- Spark-SQL电商大数据驱动精准营销
- Next Station of Flink CDC
- C++深入学习之STL:1、容器部分
- 基于Python + Requests 的Web接口自动化测试框架
- 处理解决运行前端脚手架工程报错: ‘vue-cli-service‘ 不是内部或外部命令,也不是可运行的程序 或批处理文件。附带 Linux
- 微信分销怎么做_微信小程序商城的一个独特营销工具
- C#中日期格式汇总
- java基础之set集合练习(HashSet,LinkedHashSet,TreeSet)
- C++ 开发 + VSCode 调试