RT-Thread experimental 代码学习(1)thread_sample
发布时间:2024年01月19日
RTOS的最基础功能是线程。
线程的调度是如何工作的?RT-thread官方的实验文档是最好的参考。
老规矩,先放法国人d'oxygen。
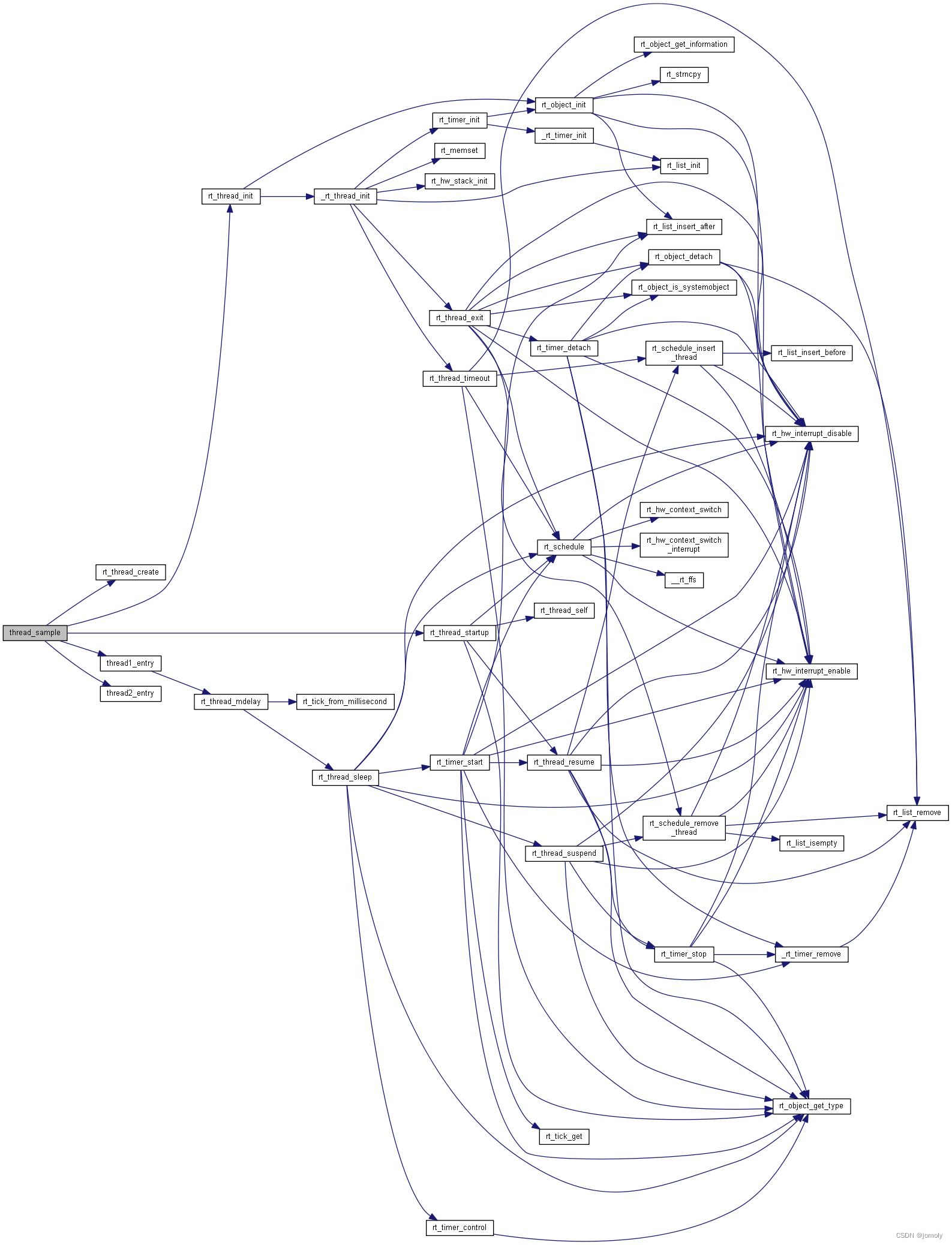 thread_sample 代码的调用关系图
thread_sample 代码的调用关系图
有意思的是,RT有两种创建线程的方式 - 静态和动态,粗略的理解是,如果ROM大那就用静态,占用RAM小;反之就用动态。例程中两种都演示了。
静态的用rt_thread_init。要多做两件事情:

1)要先显示的定义好堆栈。static char thread2_stack[1024];
2)并且要预先定义static的内存控制块。 static struct rt_thread thread2;
(正常使用前时要rt_thread_startup,完时要记得 - rt_thread_detach将该线程控制块从对象管理器中脱离)

rt_thread_startup 函数调用图

rt_thread_detach 函数调用图
动态的用rt_thread_create。
(正常使用前时要rt_thread_startup,例程中没有释放内存,正常使用完时要记得 - rt_thread_delete)
本例中两个线程,1和2,各只运行一次,其他时间进入延时,也就是rt_thread_mdelay,包括rt_thread_resume,rt_thread_suspend。
suspend 函数调用图
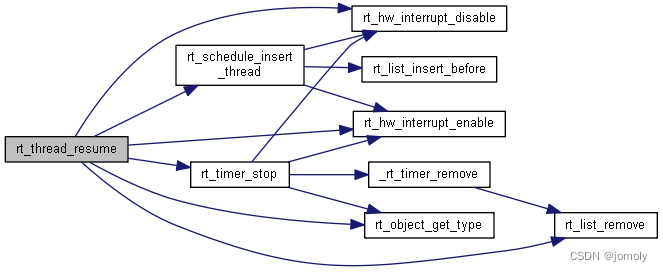 rt_thread_resume 函数调用图
rt_thread_resume 函数调用图
这两个函数在后面的例程中有展示,到时候再展开。
文章来源:https://blog.csdn.net/jomoly/article/details/135686747
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Python 断点调试
- 2024--Django平台开发-订单项目管理用户认证+动态菜单+权限控制(十三)
- Web前端-JavaScript(Dom高级)
- Apollo Cyber RT:引领实时操作系统在自动驾驶领域的创新
- Python 从基础到进阶 03: 常见设计模式及应用场景
- 《手把手教你》系列基础篇之2-python+ selenium自动化测试-打开和关闭浏览器(详细)
- 作业--day38
- 猿人学19题(原比赛平台)
- 用gpt写的登录页面
- where 条件子句