自动控制原理——数学模型建立
发布时间:2024年01月21日
目标
1.数学模型概念
描述系统输入、输出变量以及内部个变量之间的关系的数学表达式
2.建模方法
解析法(机理解析法):
根据系统工作所依据的物理定律写运动方程
实验法(系统辨识法):
给系统施加某种测试信号,记录输出响应,并用适当的数学模型去逼近系统的输入输出特性
(PID)看曲线调参就是这种????
??
判断系统是否是线性时变系统:
是否线性看变量,是否时变看系数

结构图:(可用的数学关系)

?复数的概念
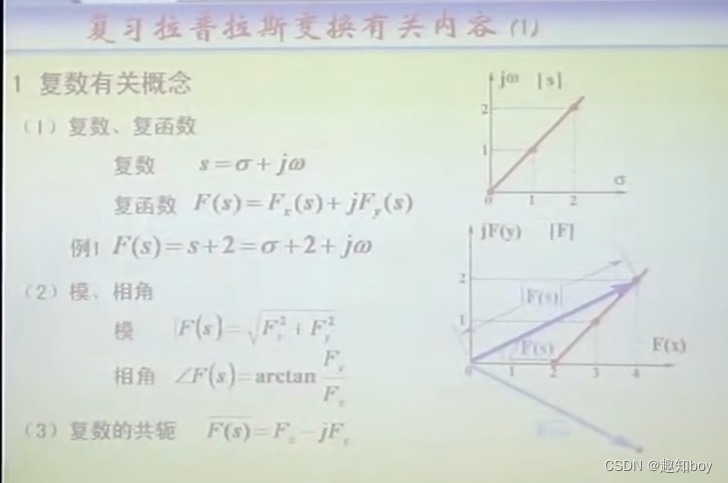
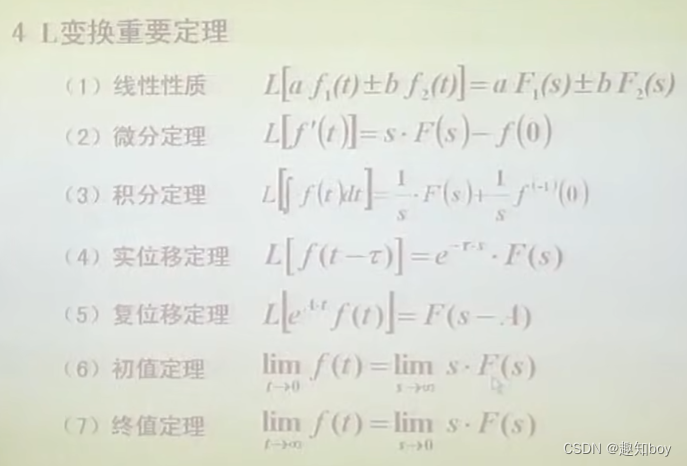
拉普拉斯变换

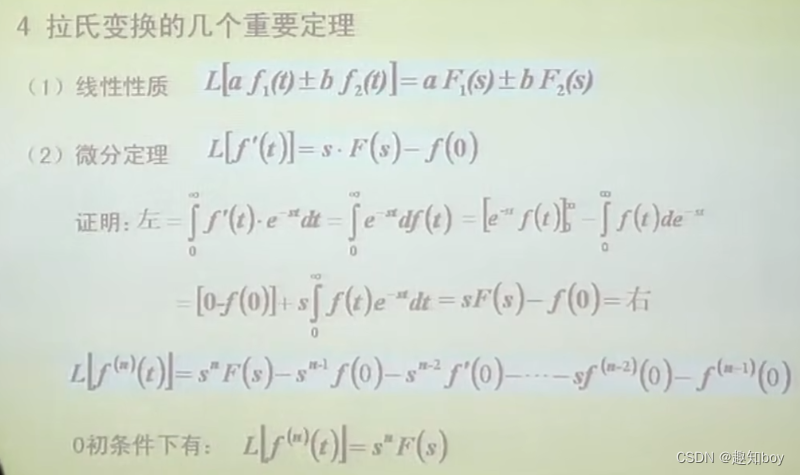

其中f(-1)是积分






现在主要是应用与(线性定常系统的分析
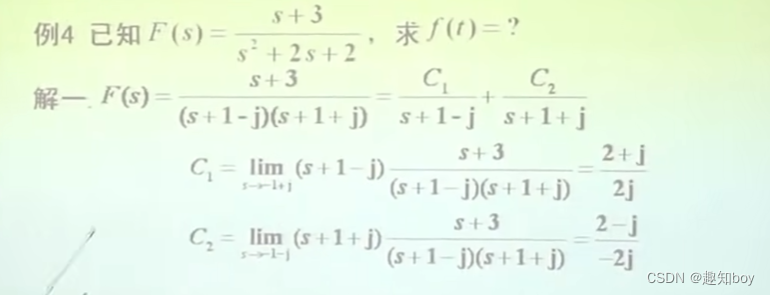
拉普拉斯反变换


相函数——部分分式
?




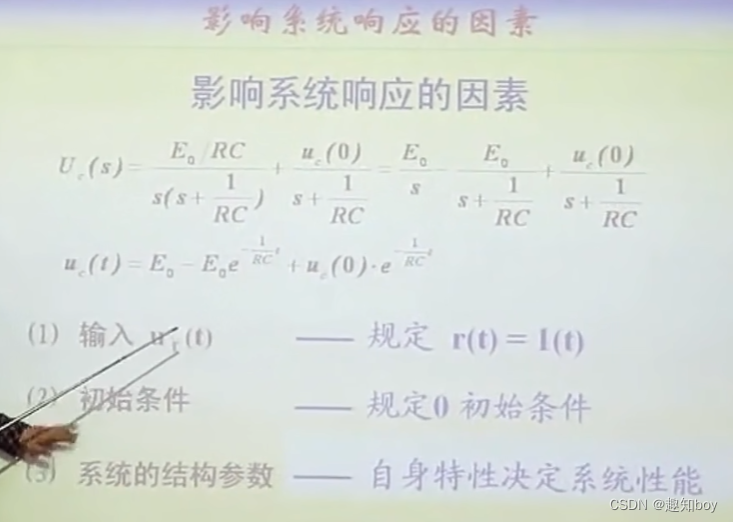
影响系统响应的因素
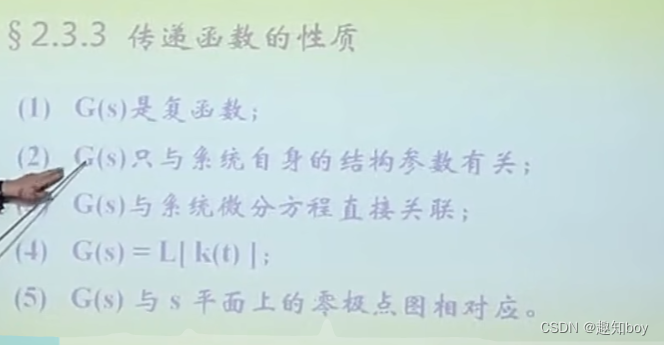
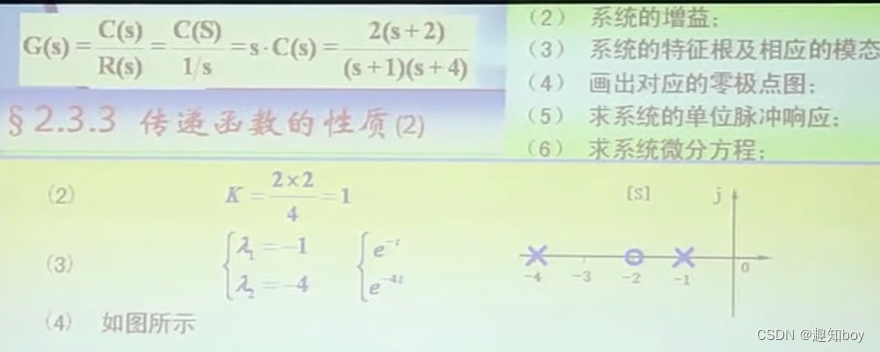
2.3.1 传递函数的定义


?
用尾一标准型,系统系数为增益? (此时为1)

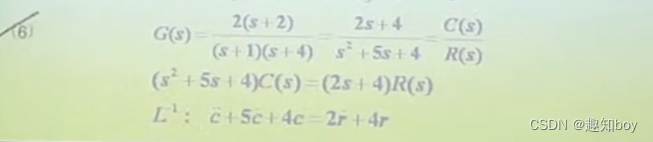

有初条件需要在L(s)到时域t后再用
初始条件引起的响应就是求时域时的齐次方程的解(忽略R(s ))


传递函数适用情况(零初始条件下、单输入单输出系统、线性定常系统)
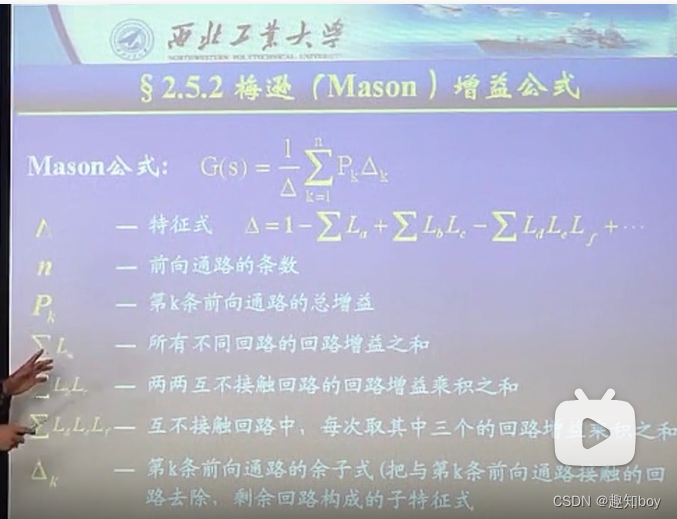
梅逊增益公式

典型环节

闭环系统的开环传递函数?
就是输入的误差,输出的是反馈信号,这两个的关系

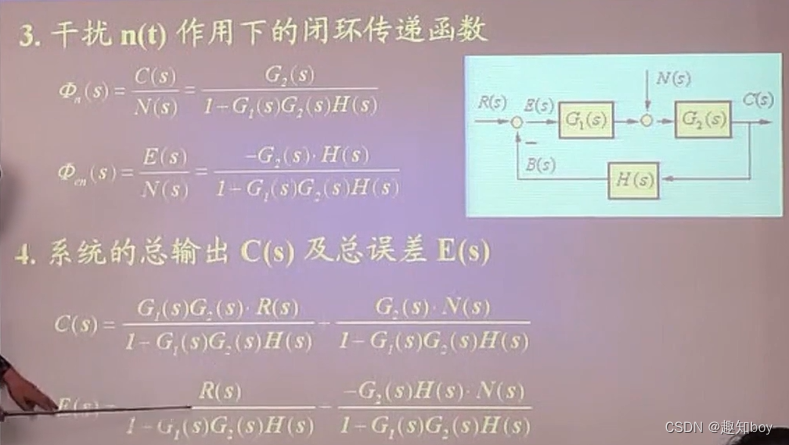
输入和扰动? 分别对应输出和误差

?
?
文章来源:https://blog.csdn.net/m0_67794575/article/details/135165271
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Java中的单例模式实现方式比较
- MYSQL索引
- Flink编程——基础环境搭建
- 轻松入门:Anaconda 在 PyCharm 中的配置与应用指南
- 地球系统模式(CESM)实践技术应用
- 快速排序模板
- JavaScript数组常用方法v2
- MyBatisCodeHelper Pro3.x新版本IDEA2023插件自由
- Android Compose——ScrollableTabRow和LazyColumn同步滑动
- FPGA之分布式RAM(2)