opencv#32 可分离滤波
?滤波的可分离性
? ? ?就是将一个线性滤波变成多个线性滤波,这里面具体所指的是变成x方向的线性滤波和y方向的线性滤波。无论先做x方向的滤波还是y方向滤波,两者的叠加结果是一致的,这个性质取决于滤波操作是并行的,也就是每一个图像在滤波的时候,图像滤波区域内的像素是独立进计算的,如果性能允许,我们可以在整个图像内同时计算。
可分离滤波的含义
线性滤波可以将滤波器分解为x方向和y方向两个滤波器,并且滤波结果与顺序无关。

? ? ?比如现在有行滤波器和列滤波器,这两个滤波器分别作用在图像中,比如先用行滤波器进行处理,之后再进行列滤波器对图像进行处理,得到的结果与行和列滤波器乘在一起的整体(联合)滤波器对图像进行滤波所得到的结果是一致的。
? ? ? 进行滤波器分离后,好处是滤波时采用的数据变少了,因为进行行滤波时,使用的是三个数据,进行列滤波时,使用的是三个数据,而如果直接用联合滤波器使用的是九个数据,从上可知,分离滤波可以极大缩减滤波处理时间,同时也为cpu这种串行处理器上实现滤波加速成为可能。
高斯滤波器用分离形式表示:

? ? ? 可表示成一个列滤波器和一个行滤波器,这两个滤波器的乘积可得到一个联合(整体)滤波器。若先对第一个列滤波器对图像进行操作,得到结果后,再将此结果输入到下一个行滤波器中,得到的最终结果与图像直接输入到联合滤波器中的结果是一致的。这样的形式可以实现两个方向上不同的滤波,例如在行上用5*5尺寸的滤波器,而在列上用3*3尺寸的滤波器,这样可以增大灵活性。
可分离滤波函数
sepFilter2D()
void cv::sepFilter2D(InputArray src,
OutputArray dst,
int ddepth,
InputArray kernelX,
InputArray kernelY,
Point anchor = Point(-1,-1),
double deta = 0;
int borderType = BORDER_DEFAULT
)·src:待滤波图像。
·dst:输出图像,与输入图像src具有相同的尺寸,通道数和数据类型。
·ddepth:输出图像的数据类型(深度),可以通过此参数修改输出图像的数据类型,因为滤波与卷积相类似,卷积过程中 可能在求和时使数据变得更大,例如方框滤波,所得结果远大于原先数据,若此时还使用原数据类型,那么可能会造成数据丢失,因此允许从此参数去设置输出的数据类型。
·kernelX:X方向的滤波器。
·kernelY:Y方向的滤波器。
·anchor:内核的基准点(锚点),其默认值为(-1,-1)代表内核基准点位于kernel的中心位置。
·delta:偏值,在计算结果上加上偏值。
·borderType:像素外推法选择标志。
示例
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv; //opencv的命名空间
using namespace std;
//主函数
int main()
{
float points[25] = { 1,2,3,4,5,
6,7,8,9,10,
11,12,13,14,15,
16,17,18,19,20,
21,22,23,24,25 };
Mat data(5, 5, CV_32FC1, points);
//X方向,Y方向和联合滤波器的构建
Mat a = (Mat_<float>(3, 1) << -1, 3, -1);
Mat b = a.reshape(1, 1);//将3*1的矩阵变为1*3的通道的矩阵
Mat ab = a * b;
//验证高斯滤波的可分离性
Mat gaussX = getGaussianKernel(3, 1); //此函数可自动生成一定尺寸的高斯滤波器,第一个参数是尺寸,第二个参数是标准差
Mat gaussData, gaussDataXY;
GaussianBlur(data, gaussData, Size(3, 3), 1, 1, BORDER_CONSTANT);
sepFilter2D(data, gaussDataXY, -1, gaussX, gaussX, Point(-1, -1), 0, BORDER_CONSTANT);
//输入两种高斯滤波的计算结果
cout << "gaussData=" << endl << gaussData << endl;
cout << "gaussDataXY=" << endl << gaussDataXY << endl;
//线性滤波的可分离性
Mat dataYX, dataY, dataXY, dataXY_sep;
filter2D(data, dataY, -1, a, Point(-1, -1), 0, BORDER_CONSTANT); //进行y方向滤波
filter2D(dataY, dataYX, -1, b, Point(-1, -1), 0, BORDER_CONSTANT); //进行x方向滤波
filter2D(data,dataXY, -1, ab, Point(-1, -1), 0, BORDER_CONSTANT); //xy联合滤波,此结果应当与前两个操作的结果一致
sepFilter2D(data, dataXY_sep, -1, b, b, Point(-1, -1), 0, BORDER_CONSTANT); //使用分离滤波函数进行滤波的结果,若与上面的结果一致,那么可以得到结论:分离滤波函数可以接受两个同尺寸的滤波器
//输出分离滤波和联合滤波的计算结果
cout << "dataYX=" << endl << dataYX << endl;
cout << "dataXY=" << endl << dataXY << endl;
cout << "dataXY_sep=" << endl << dataXY_sep << endl;
//对于图像的可分离操作
Mat img = imread("E:/opencv/opencv-4.6.0-vc14_vc15/opencv/lenac.png");
if (img.empty())
{
cout << "请确认图像文件名是否正确" << endl;
}
Mat imgYX, imgY, imgXY;
filter2D(img, imgY, -1, a, Point(-1, -1), 0, BORDER_CONSTANT);
filter2D(imgY, imgYX, -1, b, Point(-1, -1), 0, BORDER_CONSTANT);
filter2D(img, imgXY, -1, ab, Point(-1, -1), 0, BORDER_CONSTANT);
imshow("img", img);
imshow("imgY", imgY);
imshow("imgYX", imgYX);
imshow("imgXY", imgXY);
waitKey(0);//等待函数用于显示图像,按下键盘任意键后退出
return 0;
}结果

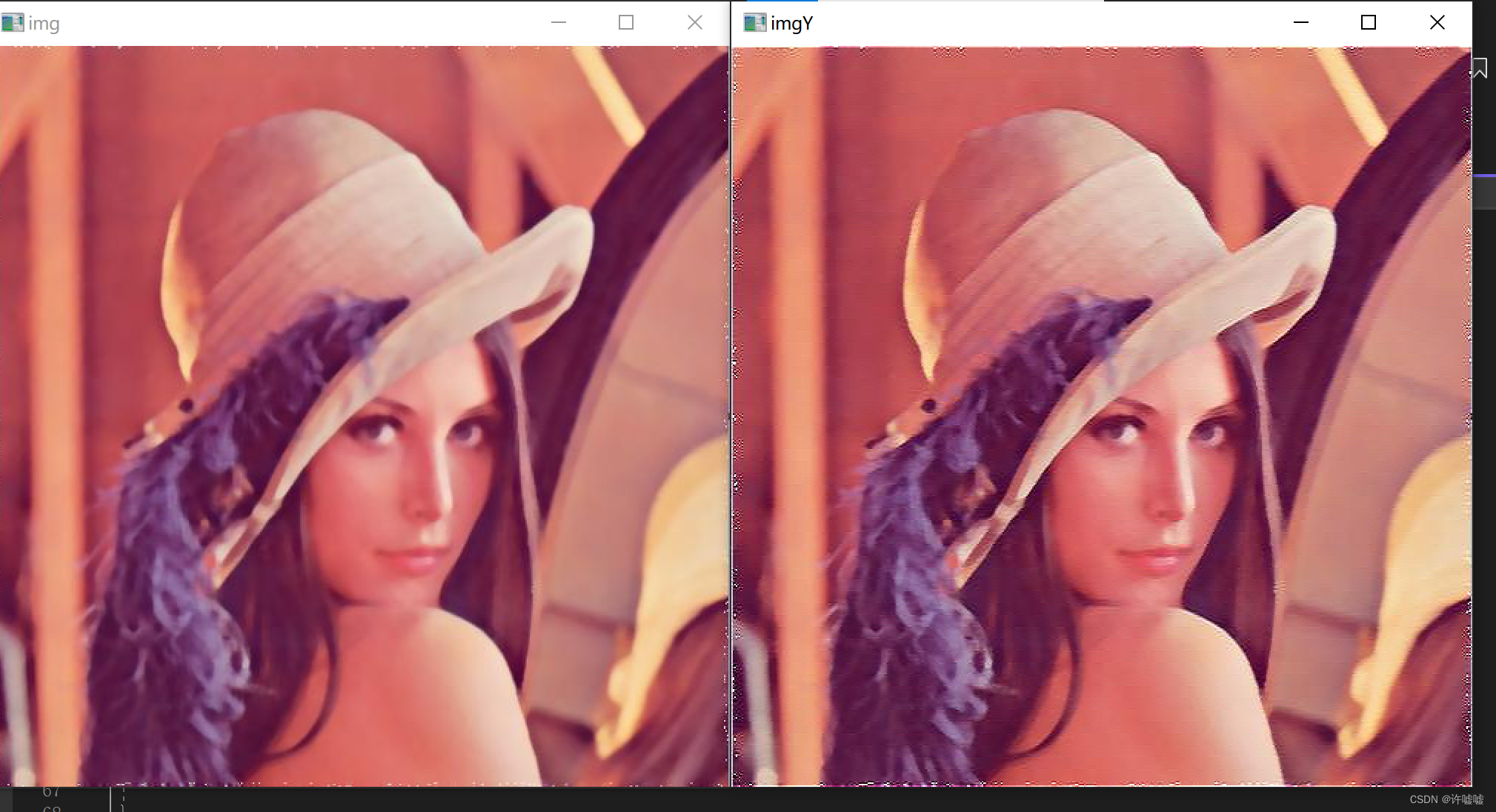
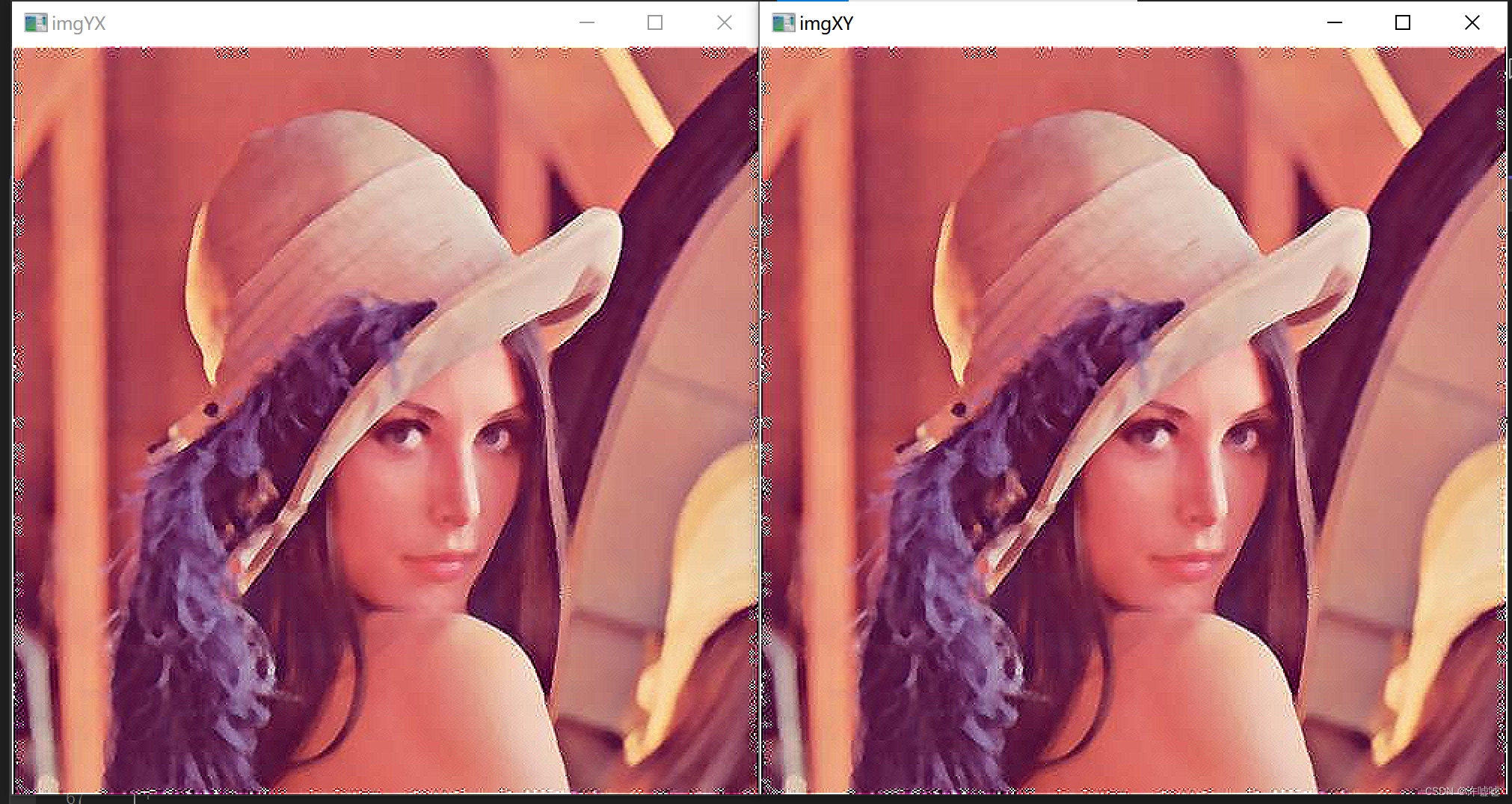 ?由运行结果可知,对于图像的滤波可以经过线性分离实现,这样可以极大的所见程序运行所需要的数据,我们不需要将两个方向的滤波器乘在一起得到联合滤波器,也缩减了我们的工作量。
?由运行结果可知,对于图像的滤波可以经过线性分离实现,这样可以极大的所见程序运行所需要的数据,我们不需要将两个方向的滤波器乘在一起得到联合滤波器,也缩减了我们的工作量。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- zkSend — — 在Sui上发红包像发电子邮件一样简单
- VMware之FTP的简介以及搭建&计算机端口的介绍
- 我的第一篇博客——对未来的一些展望吧
- 部署本地GPT
- STM32——串口(UART)使用
- linux pxe高效批量网络装机
- 【已解决】Redis序列化反序列化不一致 - String类型值多了双引号问题
- 贪吃蛇游戏
- 科创板涨跌幅限制20%,上海怎么开参考表账户佣金费率最低?万一是哪家证券公司?
- 【C】P1 开始学习 C 语言与开发环境 Clion 配置