realsense t265参数查询与释义
发布时间:2024年01月22日
参考优秀贴:
Intel Realsense T265使用教程
修改vins-fusion中T265的相机模型文件
一、相机内外参
方法1 – 通过echo ~/info话题获取
含有相机信息的话题共有三个,分别为两个鱼眼相机以及一个IMU话题
鱼眼相机:
rostopic echo /camera/fisheye1/camera_info
header:
seq: 13
stamp:
secs: 1705891756
nsecs: 533158064
frame_id: "camera_fisheye1_optical_frame"
height: 800
width: 848
distortion_model: "equidistant"
D: [-0.008032865822315216, 0.04197604954242706, -0.03984801843762398, 0.006671988870948553] --- 畸变 k1,k2,p1,p2
K: [286.01019287109375(fx), 0.0, 415.5975036621094(cx), 0.0, 286.28009033203125(fy), 388.86700439453125(cy), 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [286.01019287109375, 0.0, 415.5975036621094, 0.0, 0.0, 286.28009033203125, 388.86700439453125, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
---
IMU:
rostopic echo /camera/gyro/imu_info
data: [1.0019333362579346, 0.0, 0.0, 0.0020760896150022745, 0.0, 1.00546395778656, 0.0, -0.0007157127256505191, 0.0, 0.0, 1.0032858848571777, 0.0036664302460849285]
noise_variances: [5.148030140844639e-06, 5.148030140844639e-06, 5.148030140844639e-06]
bias_variances: [4.999999987376214e-07, 4.999999987376214e-07, 4.999999987376214e-07]
---
含义:

通过 rostopic hz +话题名查看话题频率
方法2 通过realsense命令
rs-enumerate-devices -c
使用该指令时不能通过roslaunch开启相机
- 相机基本信息:
Device info:
Name : Intel RealSense T265
Serial Number : 224622111947
Firmware Version : 0.2.0.951
Physical Port : 4-2-3
Product Id : 0B37
Usb Type Descriptor : 3.1
Product Line : T200
Stream Profiles supported by Tracking Module
Supported modes:
stream resolution fps format
Fisheye 1 848x800 @ 30Hz Y8
Fisheye 2 848x800 @ 30Hz Y8
Gyro N/A @ 200Hz MOTION_XYZ32F
Accel N/A @ 62Hz MOTION_XYZ32F
Pose N/A @ 200Hz 6DOF
- 鱼眼相机内参:
PS:这样查找出来的内参与使用话题得到的内参数字有些差距
Intrinsic of "Fisheye 1" / 848x800 / {Y8}
Width: 848
Height: 800
PPX: 415.597503662109
PPY: 388.867004394531
Fx: 286.010192871094
Fy: 286.280090332031
Distortion: Kannala Brandt4
Coeffs: -0.00803286582231522 0.0419760495424271 -0.039848018437624 0.00667198887094855 0
FOV (deg): 112 x 108.8
Intrinsic of "Fisheye 2" / 848x800 / {Y8}
Width: 848
Height: 800
PPX: 425.432495117188
PPY: 399.840911865234
Fx: 287.047485351562
Fy: 286.825103759766
Distortion: Kannala Brandt4
Coeffs: -0.0120016001164913 0.050355289131403 -0.046617429703474 0.00880880374461412 0
FOV (deg): 111.8 x 108.7
- 运动内参:
Motion Intrinsic of "Gyro"(陀螺仪) MOTION_XYZ32F
Bias Variances: 0.000000499999999 0.000000499999999 0.000000499999999
Noise Variances: 0.000005148030141 0.000005148030141 0.000005148030141
Sensitivity :
1.001933 0.000000 0.000000 0.002076
0.000000 1.005464 0.000000 -0.000716
0.000000 0.000000 1.003286 0.003666
Motion Intrinsic of "Accel"(加速度计) MOTION_XYZ32F
Bias Variances: 0.000099999997474 0.000099999997474 0.000099999997474
Noise Variances: 0.000066952452471 0.000066952452471 0.000066952452471
Sensitivity :
1.015164 0.000000 0.000000 0.127814
0.000000 1.026080 0.000000 -0.609172
0.000000 0.000000 1.008137 -0.042595
- 外参:
外参为若干从A坐标系到B坐标系的旋转矩阵(33)与平移矩阵(13),例如:
Extrinsic from "Fisheye 1" To "Fisheye 1" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
列出的转移关系有:
| from | to |
|---|---|
| Fisheye 1 /2 | Fisheye 1 |
| Fisheye 1 /2 | Fisheye 2 |
| Fisheye 1 /2 | Gyro(陀螺仪) |
| Fisheye 1 /2 | Accel(加速度计) |
| Fisheye 1 /2 | Pose |
| Gyro | Fisheye 1 /2 |
| Gyro | Gyro / Accel / Pose |
| Accel | Fisheye 1 /2 |
| Accel | Gyro / Accel / Pose |
| Pose | Fisheye 1 /2 |
| Pose | Gyro / Accel / Pose |
PS:
from Fisheye 1 /2 to Gyro / Accel / pose的 旋转矩阵 Rotation Matrix 参数基本一致, Gyro / Accel 的平移矩阵Translation Vector 基本一致,其中x,y与 to pose的参数有差距,z轴与 to pose的基本一致:
Extrinsic from "Fisheye 1" To "Gyro" :
Rotation Matrix:
-0.999923 0.00248067 0.0121957
-0.00240702 -0.999979 0.00605006
0.0122104 0.00602023 0.999907
Translation Vector: 0.0106991715729237 2.57550709648058e-05 -0.000130651504150592
Extrinsic from "Fisheye 1" To "Accel" :
Rotation Matrix:
-0.999923 0.00248067 0.0121957
-0.00240702 -0.999979 0.00605006
0.0122104 0.00602023 0.999907
Translation Vector: 0.0106991715729237 2.57550709648058e-05 -0.000130651504150592
Extrinsic from "Fisheye 1" To "Pose" :
Rotation Matrix:
0.999923 -0.00248067 -0.0121957
-0.00240702 -0.999979 0.00605006
-0.0122104 -0.00602023 -0.999907
Translation Vector: -0.0322808921337128 6.38301862636581e-05 0.000139380805194378
IMU之间参数关系 —>>>>
Extrinsic from "Pose" To "Gyro" :
Rotation Matrix:
-1 0 -0
-0 1 -0
-0 0 -1
Translation Vector: -0.0215817205607891 -3.80751152988523e-05 8.72930104378611e-06
Extrinsic from "Pose" To "Accel" :
Rotation Matrix:
-1 0 -0
-0 1 -0
-0 0 -1
Translation Vector: -0.0215817205607891 -3.80751152988523e-05 8.72930104378611e-06
Extrinsic from "Pose" To "Pose" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
二、发布的odom信息
查询odom信息与哪个坐标系保持一致:
使用TF树查看: rosrun rqt_tf_tree rqt_tf_tree
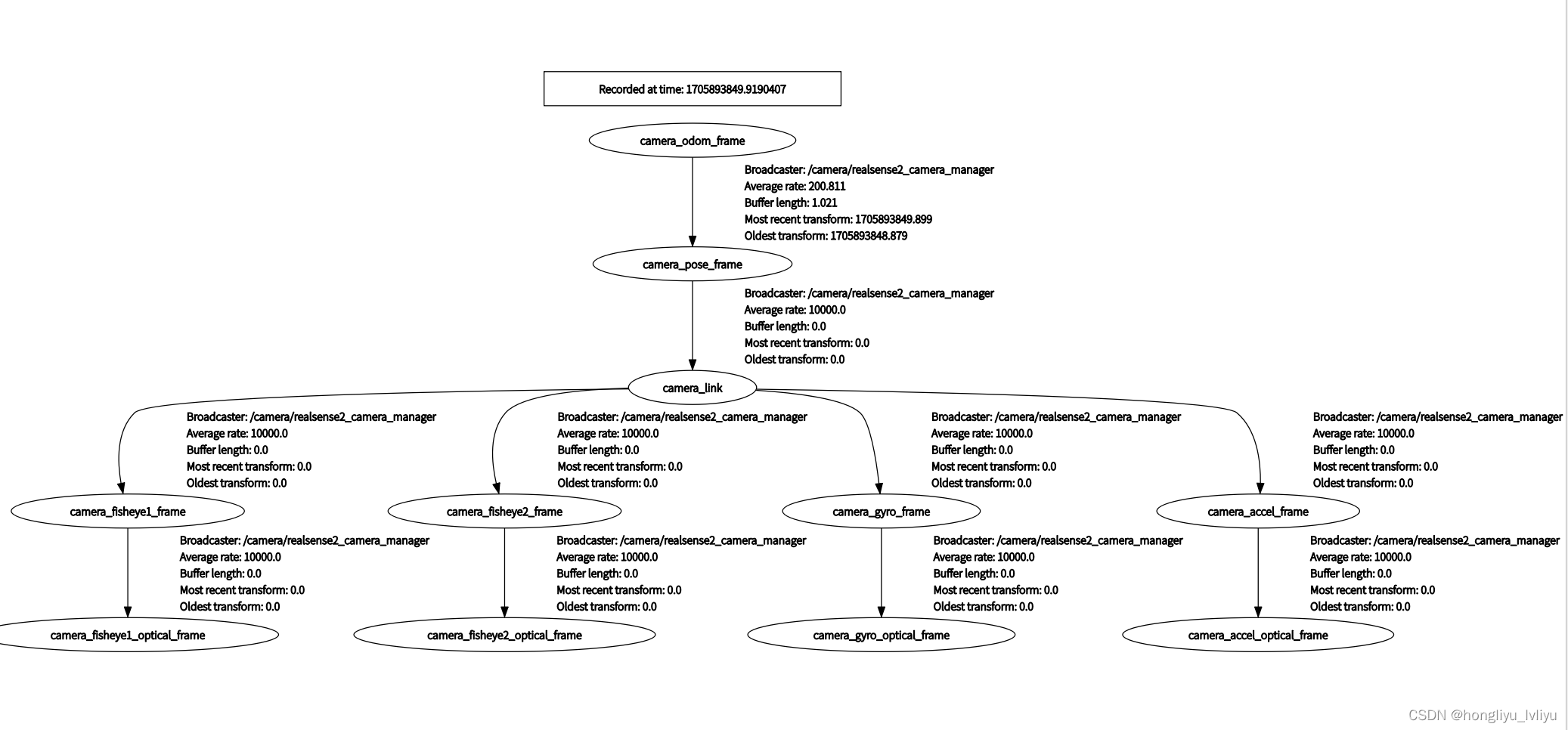
使用TF树不能清晰表示获得的坐标信息;
使用rviz axis:
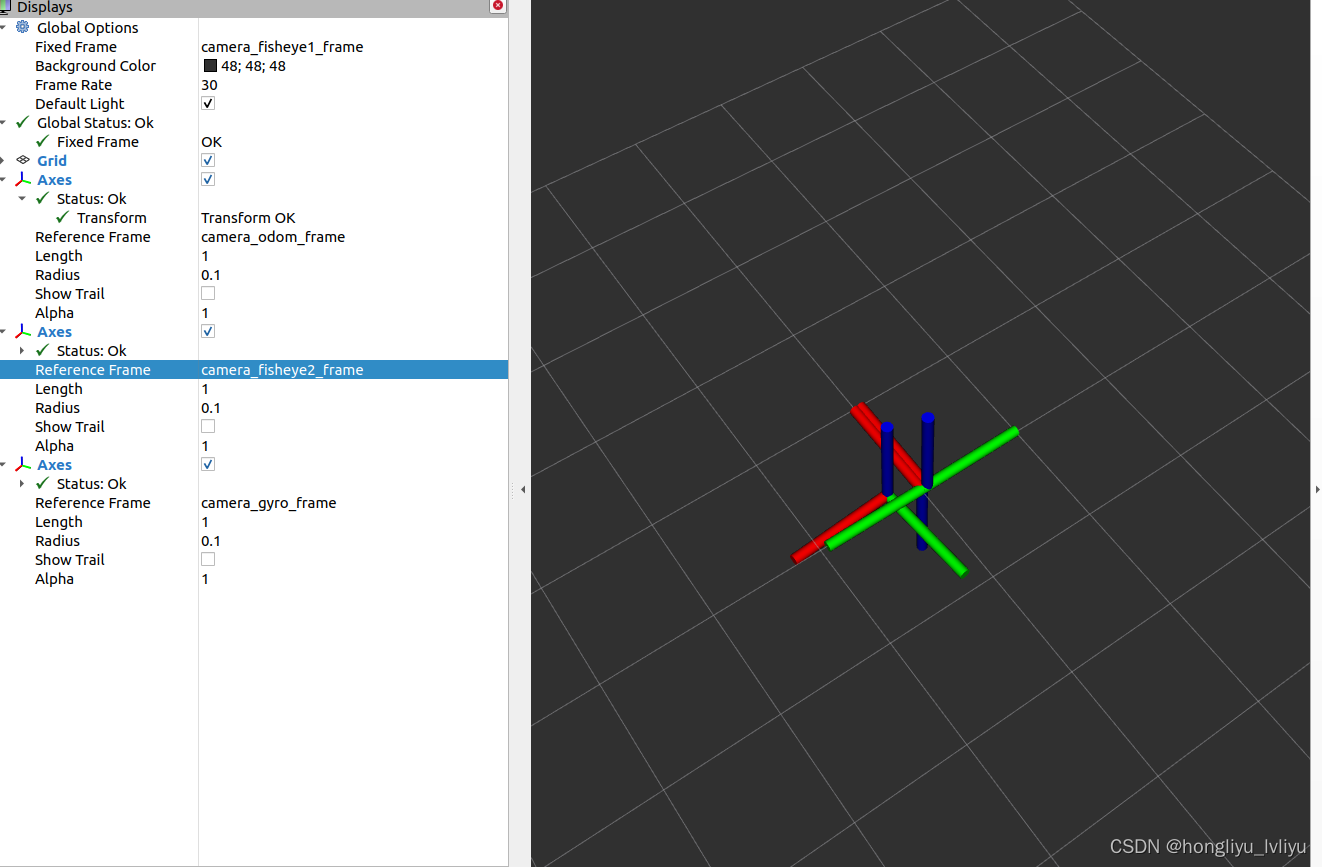
使用rviz可以查看相机相关多个坐标系信息,需要注意的是 fixed frame需要选择一个相机的坐标系,使用 map 或者 world 都会报 没有frame的警告。
三、关闭t265回环检测
在启动roslaunch 文件中添加:
<rosparam>
/camera/tracking_module/enable_relocalization: false
</rosparam>
或者:
<arg name="enable_relocalization" default="false"/>
文章来源:https://blog.csdn.net/hongliyu_lvliyu/article/details/135742779
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!