NLP深入学习(九):KNN 算法及分类用法
0. 引言
前情提要:
《NLP深入学习(一):jieba 工具包介绍》
《NLP深入学习(二):nltk 工具包介绍》
《NLP深入学习(三):TF-IDF 详解以及文本分类/聚类用法》
《NLP深入学习(四):贝叶斯算法详解及分类/拼写检查用法》
《NLP深入学习(五):HMM 详解及字母识别/天气预测用法》
《NLP深入学习(六):n-gram 语言模型》
《NLP深入学习(七):词向量》
《NLP深入学习(八):感知机学习》
1. 什么是 KNN
K 近邻(K-Nearest Neighbors, KNN)算法是一种基础且直观的监督学习方法,用于分类和回归任务。在处理新的数据点时,KNN 算法基于“物以类聚”的原则,通过计算新样本与已有训练样本之间的距离,找出最接近的 k 个邻居,并根据这些邻居的类别或属性来预测新样本的类别或数值。
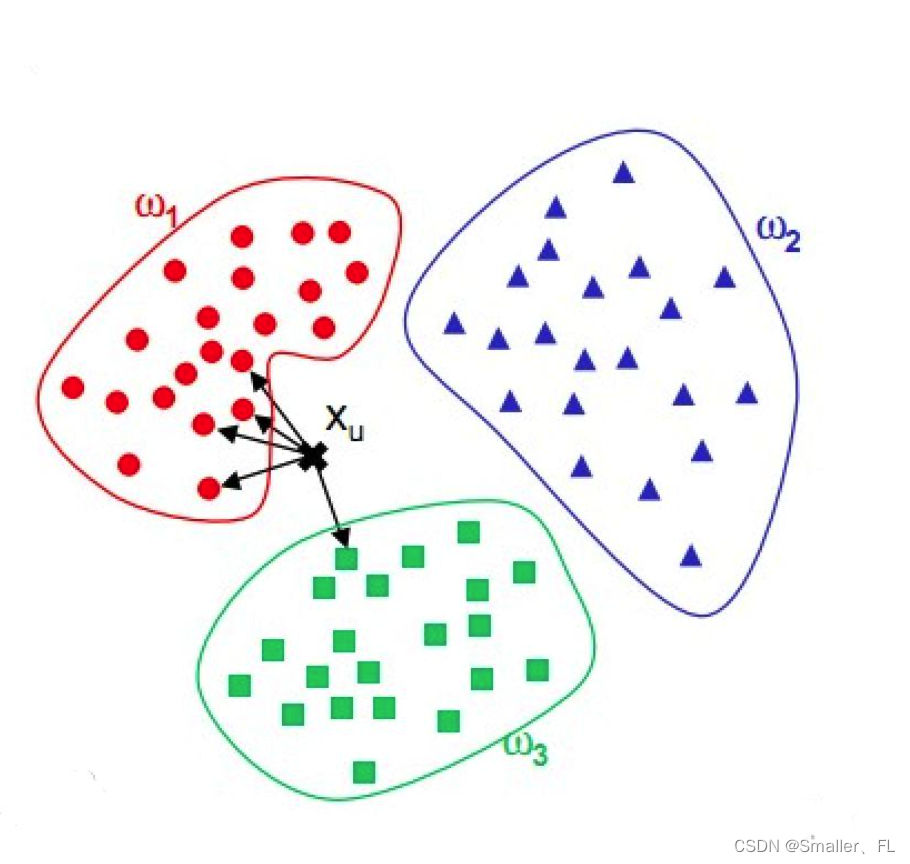
工作原理:
-
训练阶段:
- 在 KNN 中不存在明确的训练过程。算法仅存储整个训练集,不需要对训练数据进行任何模型拟合操作。KNN 算法的核心在于计算样本之间的距离,然后根据距离选择最近的邻居来进行分类或回归。以下是计算公式和步骤:
- 对于欧式距离(最常用的距离度量方法),假设我们有新样本
x
n
e
w
x_{new}
xnew? 和训练集中的一个样本
x
i
x_i
xi?,它们都是 n 维向量,则两个样本之间的欧氏距离计算公式为:
d ( x n e w , x i ) = ∑ j = 1 n ( x n e w , j ? x i , j ) 2 d(x_{new}, x_i) = \sqrt{\sum_{j=1}^{n}(x_{new, j} - x_{i, j})^2} d(xnew?,xi?)=j=1∑n?(xnew,j??xi,j?)2? - 其他常见的距离度量包括曼哈顿距离、切比雪夫距离、马氏距离等。
- 对于欧式距离(最常用的距离度量方法),假设我们有新样本
x
n
e
w
x_{new}
xnew? 和训练集中的一个样本
x
i
x_i
xi?,它们都是 n 维向量,则两个样本之间的欧氏距离计算公式为:
- 在 KNN 中不存在明确的训练过程。算法仅存储整个训练集,不需要对训练数据进行任何模型拟合操作。KNN 算法的核心在于计算样本之间的距离,然后根据距离选择最近的邻居来进行分类或回归。以下是计算公式和步骤:
-
找出k个最近邻:
- 计算新样本与训练集中所有样本的距离后,按照距离从小到大排序,并选择前k个最近的样本作为“邻居”。
-
分类决策规则(针对分类任务):
- 多数表决:统计这k个邻居中属于各个类别的样本数量,将新样本预测为出现次数最多的类别。
- 加权投票:赋予每个邻居以一定的权重(通常根据其与新样本的距离来加权,距离越近权重越大),然后对各类别进行加权投票决定新样本的类别。
-
回归预测规则(针对回归任务):
- 平均值法:计算这k个邻居的目标变量(连续数值)的平均值作为新样本的预测值。
2. k 值的选择
k 值的选择是 KNN 算法的关键。较小的 k 值可能导致模型过拟合,而较大的k值可能会使模型过于保守导致欠拟合。一般使用交叉验证,通过交叉验证来评估不同k值对模型性能的影响。将数据集划分为训练集和验证集(或使用k折交叉验证),针对一系列不同的k值,在训练集上计算每个样本的k个最近邻,并在验证集上评估模型性能(如分类任务中的准确率、召回率、F1分数等)。
3. kd 树
KNN 算法在高维数据上的效率可能会受到严重的影响,因为在高维空间中计算距离的开销很大。为了加速 KNN 算法在高维空间的执行,可以使用 kd 树(k-dimensional tree)这种数据结构。
kd 树是一种二叉树结构,用于组织k维空间中的数据点。它的构建和搜索过程允许更有效地找到近邻点,从而提高了 KNN 算法的性能。
3.1 构建 kd 树:
-
选择轴: 在树的每一层,选择一个轴(特征维度)来进行划分。通常选择方差最大的轴作为划分轴。
-
选择划分点: 在选定的轴上,选择当前数据集中的中位数作为划分点,将数据分为两个子集。
-
递归构建: 对划分点两侧的数据集递归执行上述过程,构建子树。
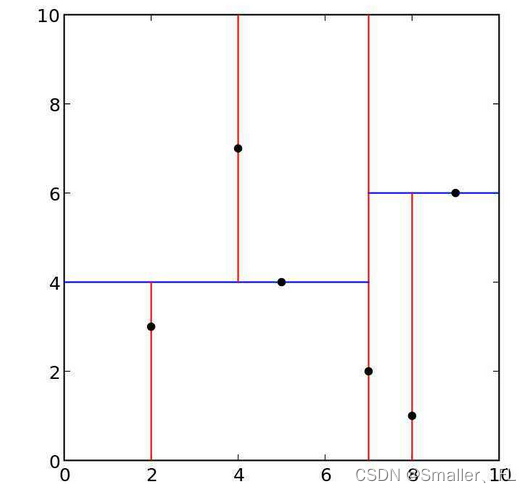
例如,上面的各个点:
(1)第一次划分,x=7,分为两部分
(2)左边的矩形划分,y=4,分为两部分;上面的用 x=4,下面用 x=2划分
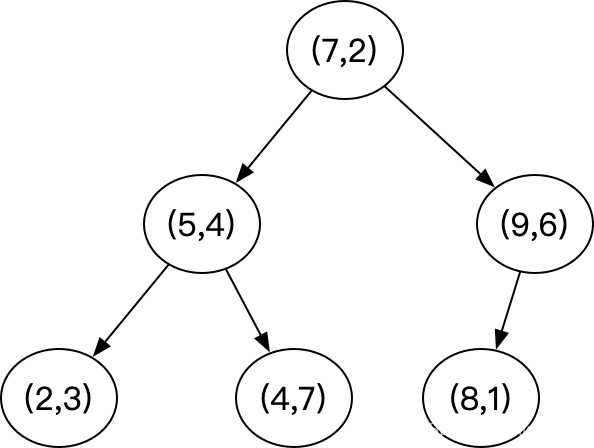
(3)左边的矩形划分,y=6,也分为两部分;下面用 x=8 划分
最终,得到的 kd 树如下:
3.2 kd 树搜索:
-
根据轴进行搜索: 从根节点开始,根据查询点在当前轴上的值比较,选择向左或向右子树移动。
-
递归搜索: 在选择的子树上递归执行搜索。
-
更新最近邻点: 在搜索的过程中,维护一个当前最近邻点的列表。如果发现更近的点,则更新最近邻点。
-
回溯: 在回溯过程中,检查是否需要在另一个子树中继续搜索。
kd 树的优点是在处理高维数据时可以减少搜索的计算开销,因为它在每一步都可以剪枝。然而,kd 树的构建和搜索过程相对复杂,适用于数据集较大、查询点较多的情况。
3.3 例子
下面我将提供一个简单的 Python 代码示例,演示如何构建一个二维数据集的 kd 树以及如何使用 kd 树进行最近邻搜索。请注意,这只是一个基本示例,实际应用中可能需要考虑更多的细节和优化。
import numpy as np
class Node:
def __init__(self, point, axis, left=None, right=None):
self.point = point
self.axis = axis
self.left = left
self.right = right
def build_kdtree(points, depth=0):
if len(points) == 0:
return None
k = len(points[0]) # 维度
axis = depth % k # 选择轴
# 根据轴排序并选择中位数作为划分点
points.sort(key=lambda x: x[axis])
median = len(points) // 2
return Node(
point=points[median],
axis=axis,
left=build_kdtree(points[:median], depth + 1),
right=build_kdtree(points[median + 1:], depth + 1)
)
def closest_point(root, target, depth=0, best=None):
if root is None:
return best
k = len(target)
axis = depth % k
next_best = None
next_branch = None
if target[axis] < root.point[axis]:
next_branch = root.left
else:
next_branch = root.right
next_best = closest_point(next_branch, target, depth + 1, next_best)
# 更新最近邻点
if best is None or np.linalg.norm([target[i] - root.point[i] for i in range(k)]) < np.linalg.norm([target[i] - best[i] for i in range(k)]):
best = root.point
# 检查另一个分支是否可能包含更近的点
if abs(target[axis] - root.point[axis]) < np.linalg.norm([target[i] - best[i] for i in range(k)]):
next_branch = root.right if next_branch == root.left else root.left
next_best = closest_point(next_branch, target, depth + 1, next_best)
return best
# 示例数据集
data_points = [(2,3), (5,4), (9,6), (4,7), (8,1), (7,2)]
query_point = (9,2)
# 构建kd树
kd_tree = build_kdtree(data_points)
# 查找最近邻点
nearest_neighbor = closest_point(kd_tree, query_point)
print("Data Points:", data_points)
print("Query Point:", query_point)
print("Nearest Neighbor:", nearest_neighbor)
在这个例子中,我们首先定义了一个 Node 类来表示 kd 树的节点,然后使用 build_kdtree 函数构建 kd 树。最后,使用 closest_point 函数来查找查询点的最近邻点。
4. 参考
《NLP深入学习(一):jieba 工具包介绍》
《NLP深入学习(二):nltk 工具包介绍》
《NLP深入学习(三):TF-IDF 详解以及文本分类/聚类用法》
《NLP深入学习(四):贝叶斯算法详解及分类/拼写检查用法》
《NLP深入学习(五):HMM 详解及字母识别/天气预测用法》
《NLP深入学习(六):n-gram 语言模型》
《NLP深入学习(七):词向量》
《NLP深入学习(八):感知机学习》
欢迎关注本人,我是喜欢搞事的程序猿; 一起进步,一起学习;
也欢迎关注我的wx公众号:一个比特定乾坤
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!