高级分布式系统-第14讲 分布式控制经典理论
模糊控制
模糊控制是一种以模糊集合论、模糊语言变量以及模糊逻辑推理为数学基础的控制方法,它模拟人的思维,构造一种非线性控制,以满足复杂的不确定的过程控制的需要,属于智能控制范畴。
由于模糊控制是对人的思维方式和控制经验的模仿,所以在一定程度上可以认为模糊控制方法是一种实现了用计算机推理代替人脑思维的控制方法。模糊控制之所以可以模仿人的思维和经验,是因为人们在描述控制规则时大量的使用模糊概念。
模糊控制系统的组成
模糊控制系统通常由模糊控制器、输入输出接口、执行机构、测量装置和被控对象等五个部分组成,如下图所示。

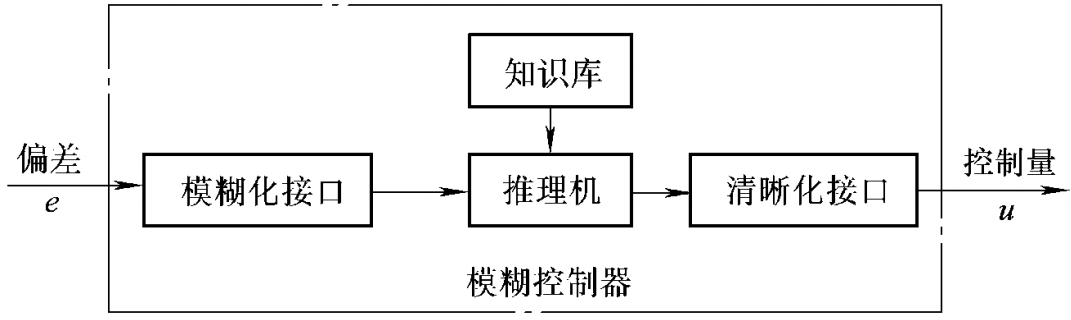
模糊控制器的结构原理
模糊控制器主要包括输入量模糊化接口、知识库、推理机、输出清晰化接口四个部分,如下图所示。
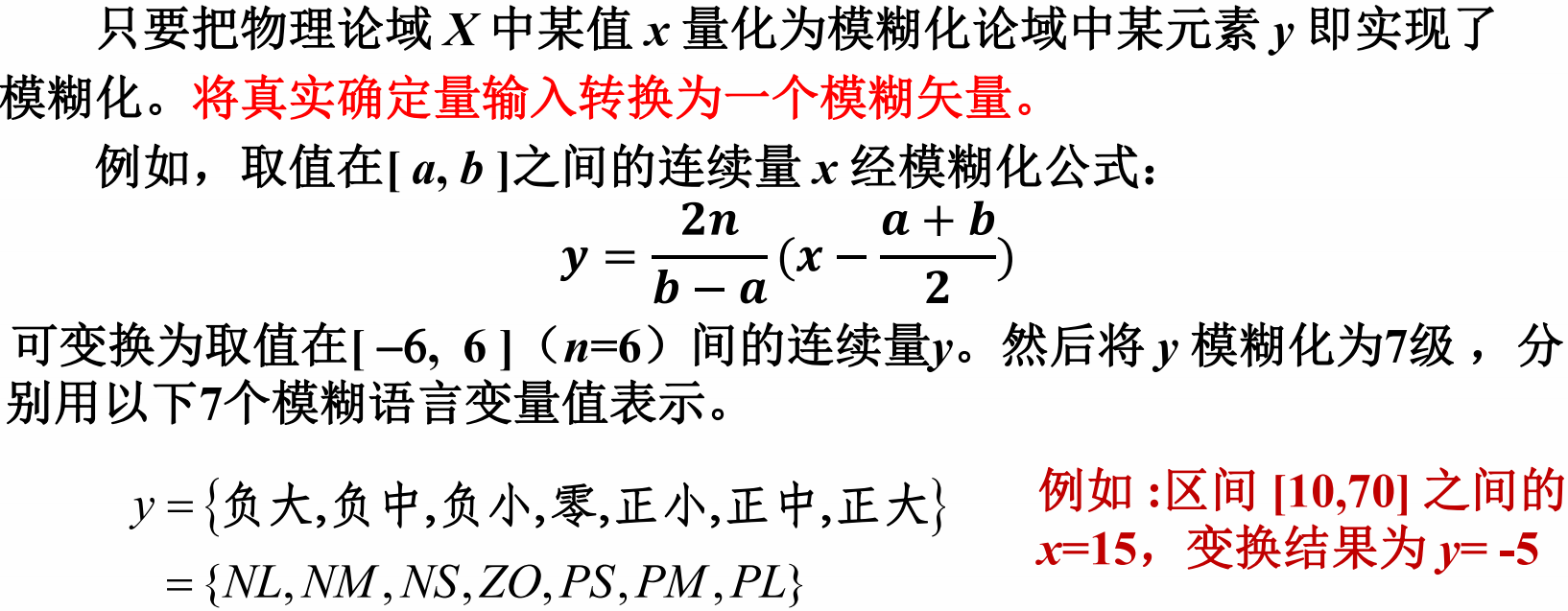
模糊控制器的结构原理——模糊化接口
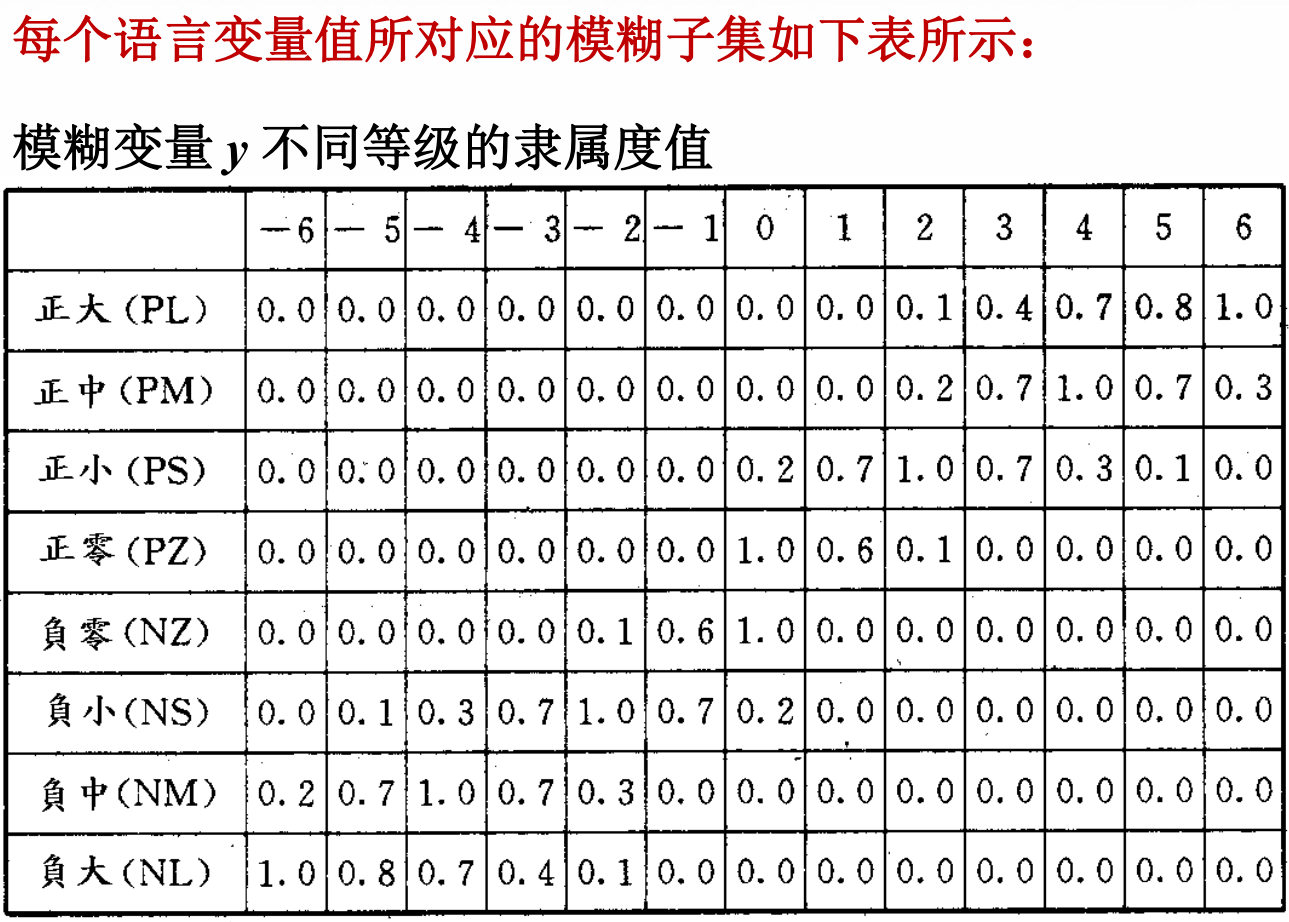
模糊控制器的结构原理——知识库
知识库= 数据库+规则库
数据库:存放所有输入输出变量的全部模糊子集的隶属度。
① 如果论域为连续域,则存放相应的隶属函数。
② 输入输出变量的测量数据集不属于数据库存放内容。
③ 向推理机提供数据。
规则库:存放全部的模糊控制规则。
① 模糊控制器规则基于专家知识或手动操作经验建立,是按人直觉推理的一种语言表示形式。
② 向推理机提供控制规则。
模糊控制器的结构原理——推理机
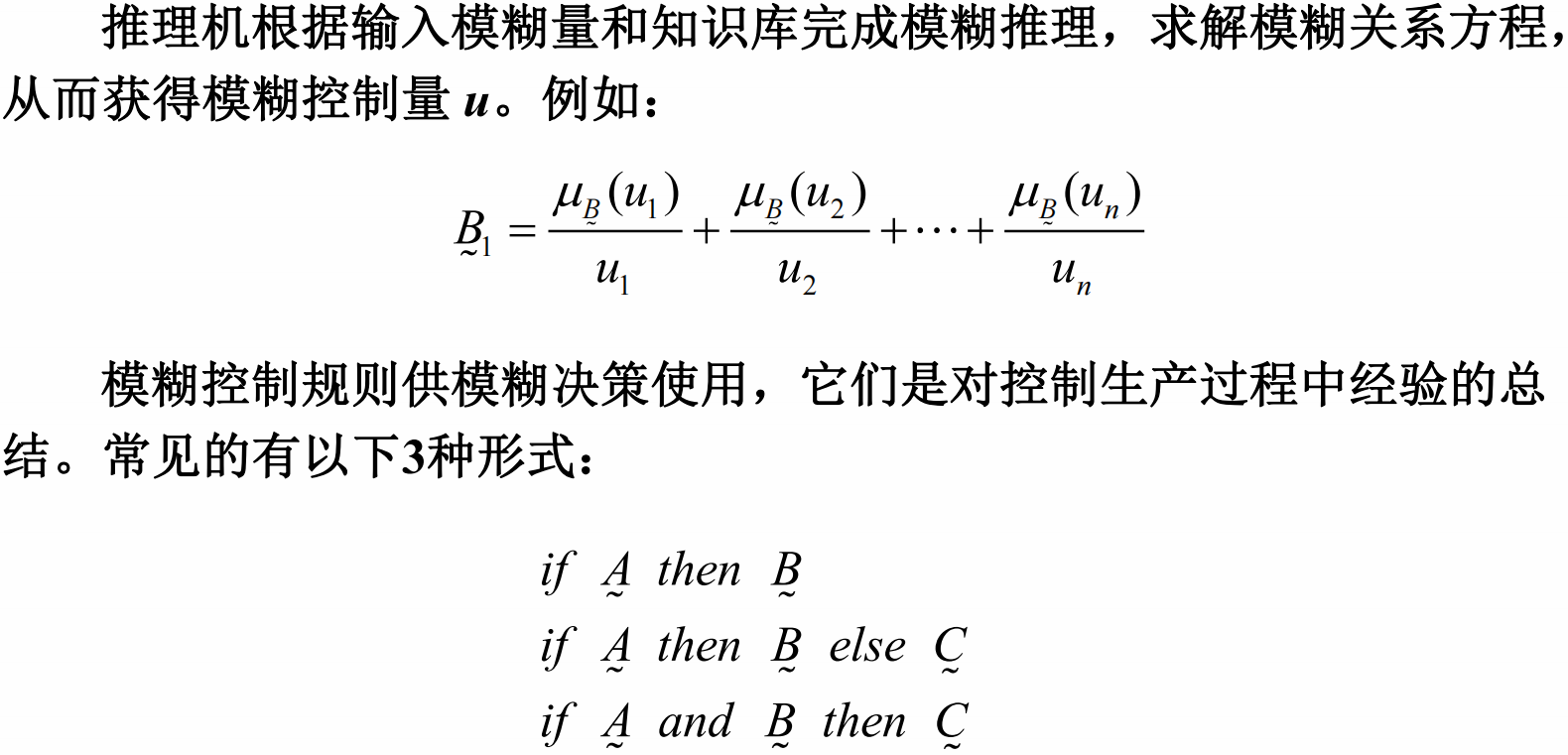
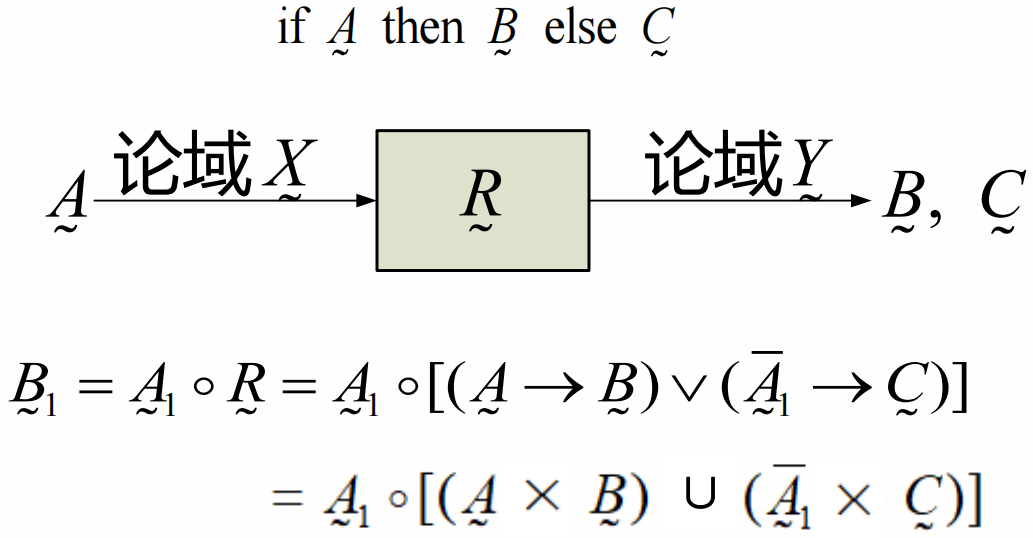
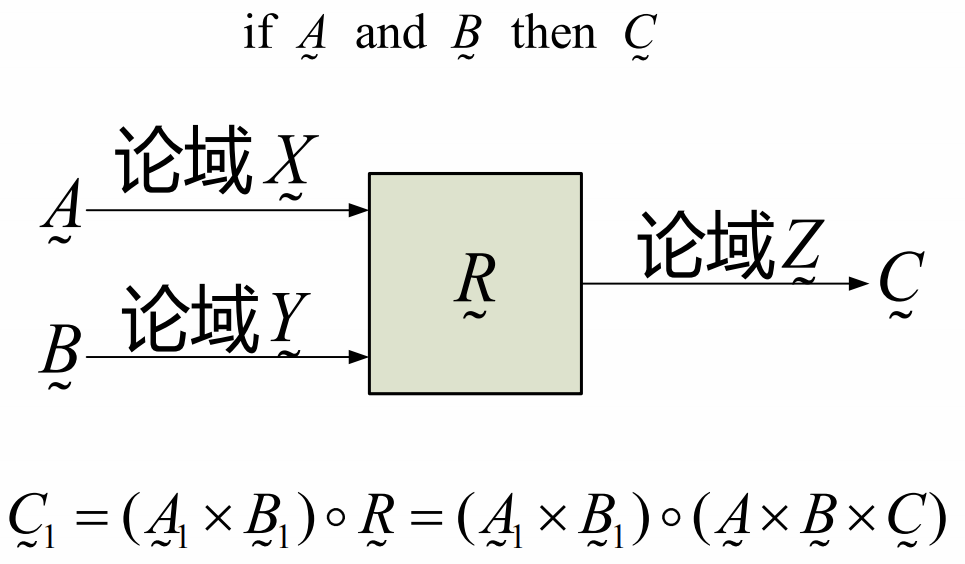
模糊推理:针对不同的模糊规则,利用模糊关系,通过模糊变换,求得模糊控制量。例如针对常见的三种形式:
模糊控制器的结构原理——清晰化接口
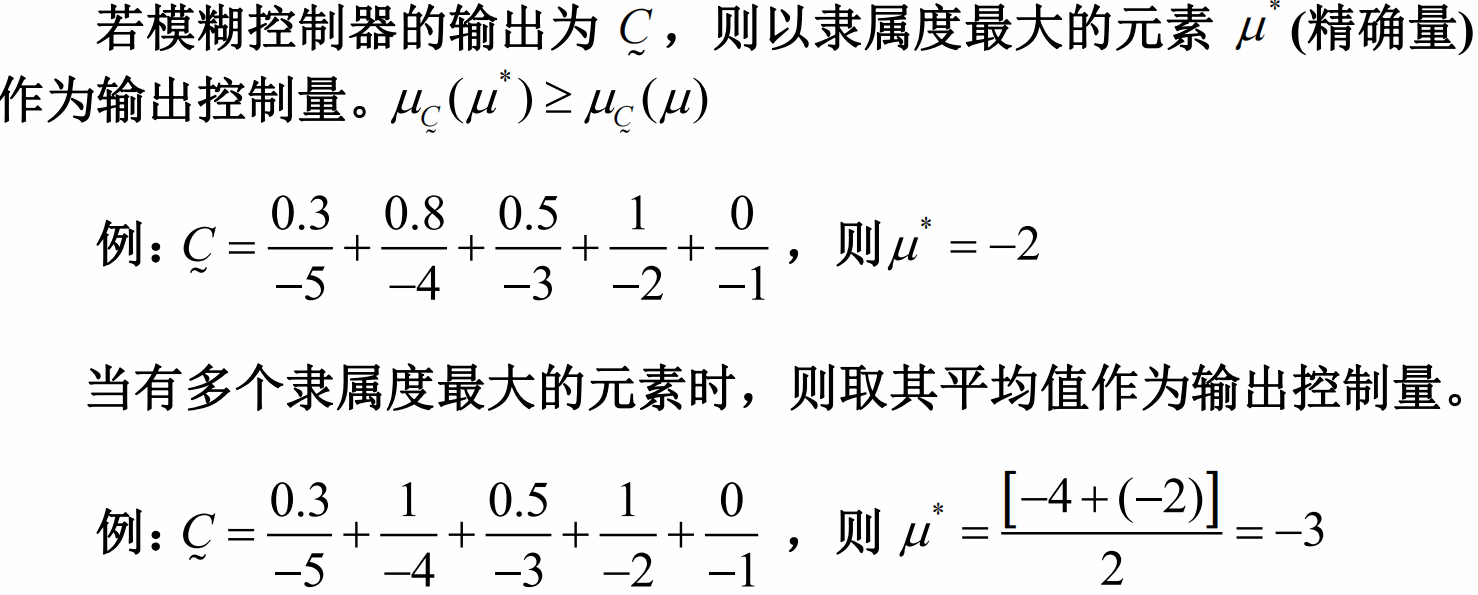
得到模糊控制量后,还必须将其转换为精确量。常用的清晰化方法有以下2种:
(1)最大隶属度法
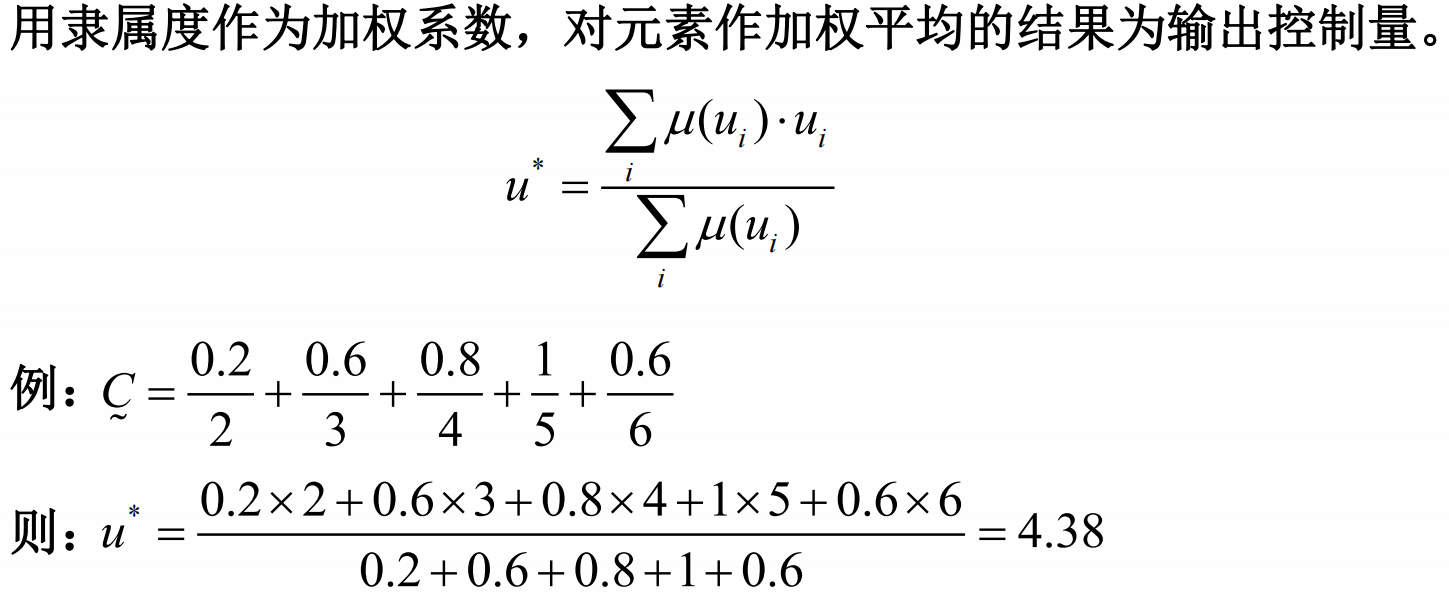
(2)加权平均法(重心法)
最大隶属度法
加权平均法(重心法)
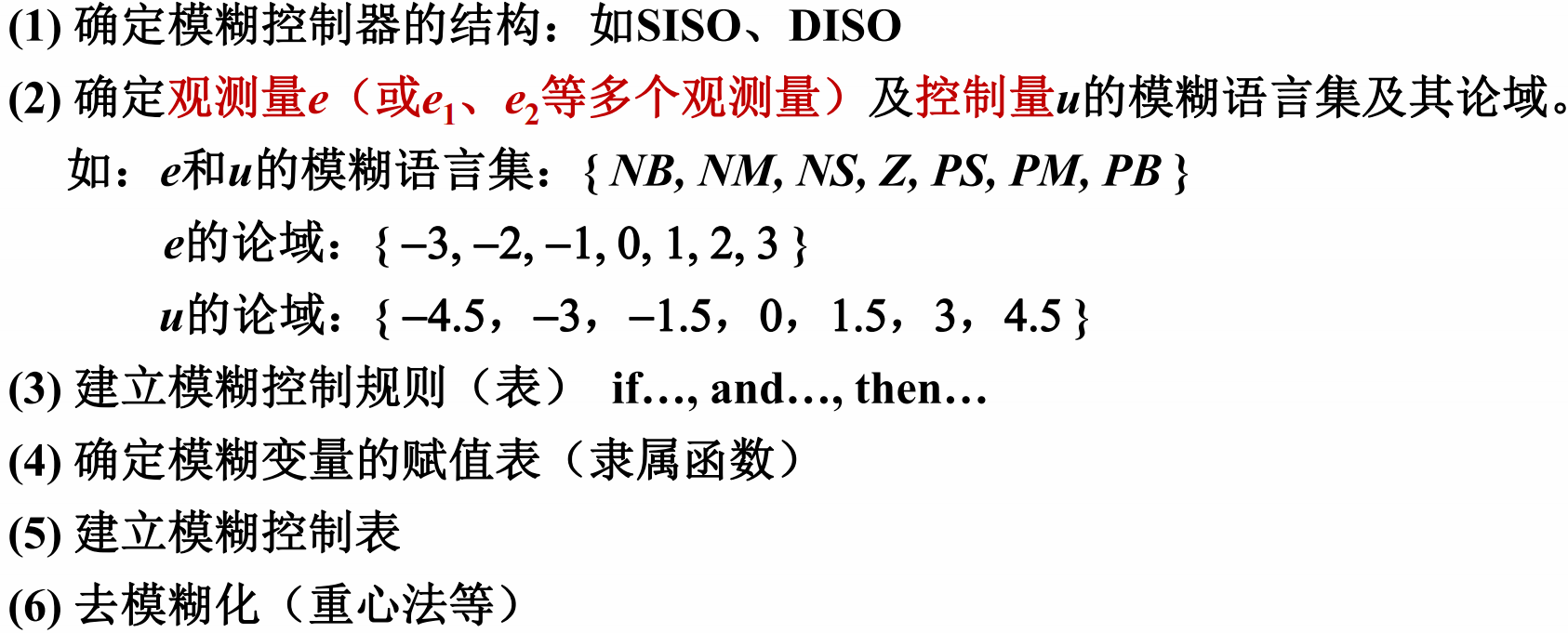
模糊控制器设计的步骤
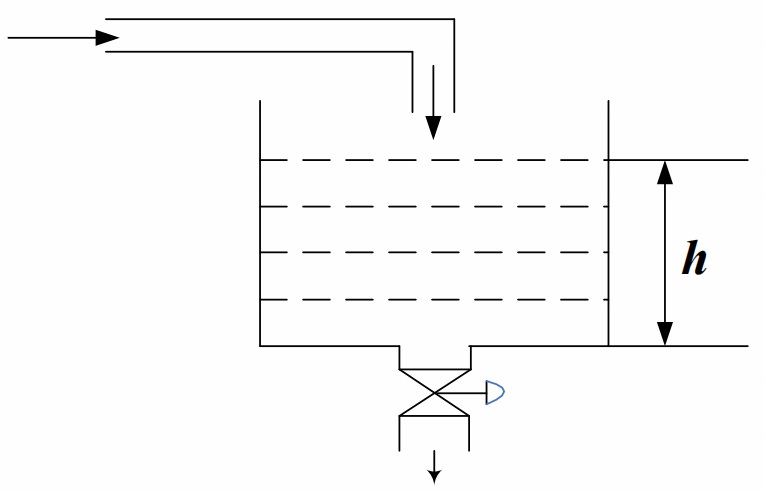
模糊控制例子:水位
以水位的模糊控制为例,如图所示。设有一个水箱,通过调节阀可向内注水和向外抽水。现在的控制任务设计一个模糊控制器,通过调节阀门将水位稳定在固定点附近。按照日常操作经验,可以得到基本的控制规则:
“若水位高于O点,则向外排水,差值越大,排水越快”;
“若水位低于O点,则向内注水,差值越大,注水越快”。
下面我们分步骤看模糊控制系统的工作原理
确定观测量和控制量

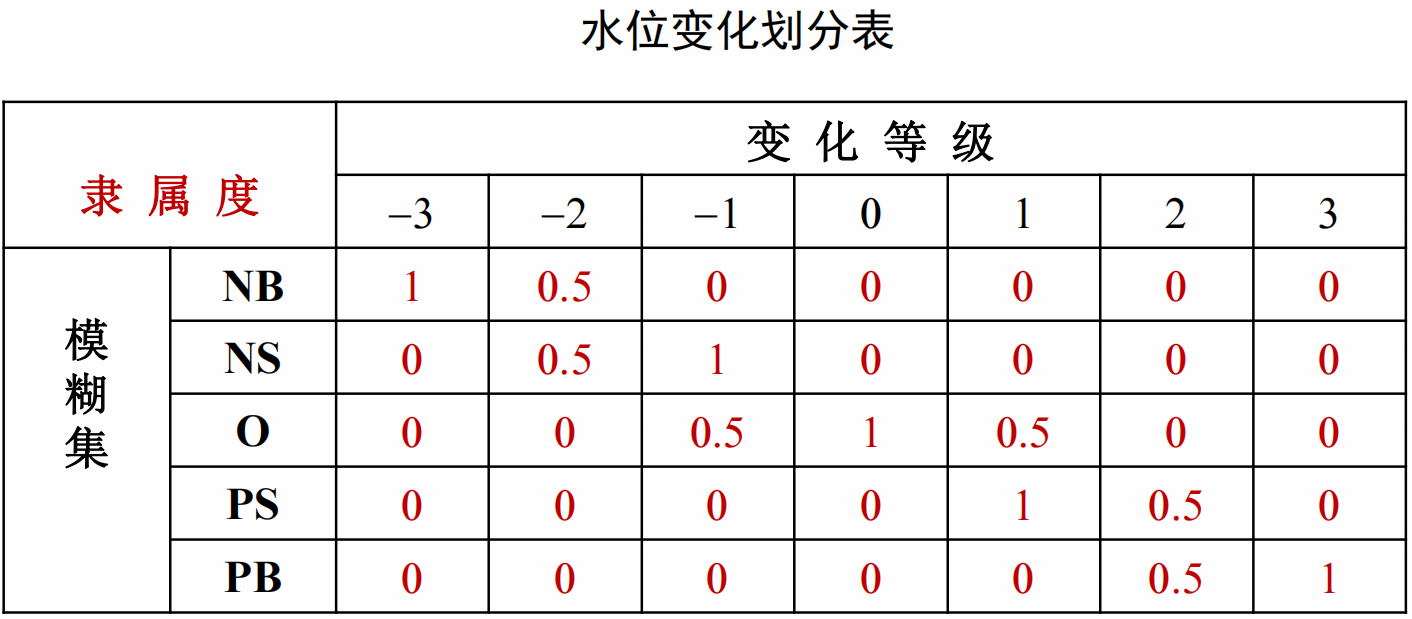
将偏差 e 分为五级(模糊语言集):负大(NB),负小(NS),零(O),正小(PS),正大(PB)。根据偏差 e 的变化范围分为七个等级(输入论域):-3, -2, -1, 0, +1,+2, +3。得到水位变化模糊表,如下表所示:
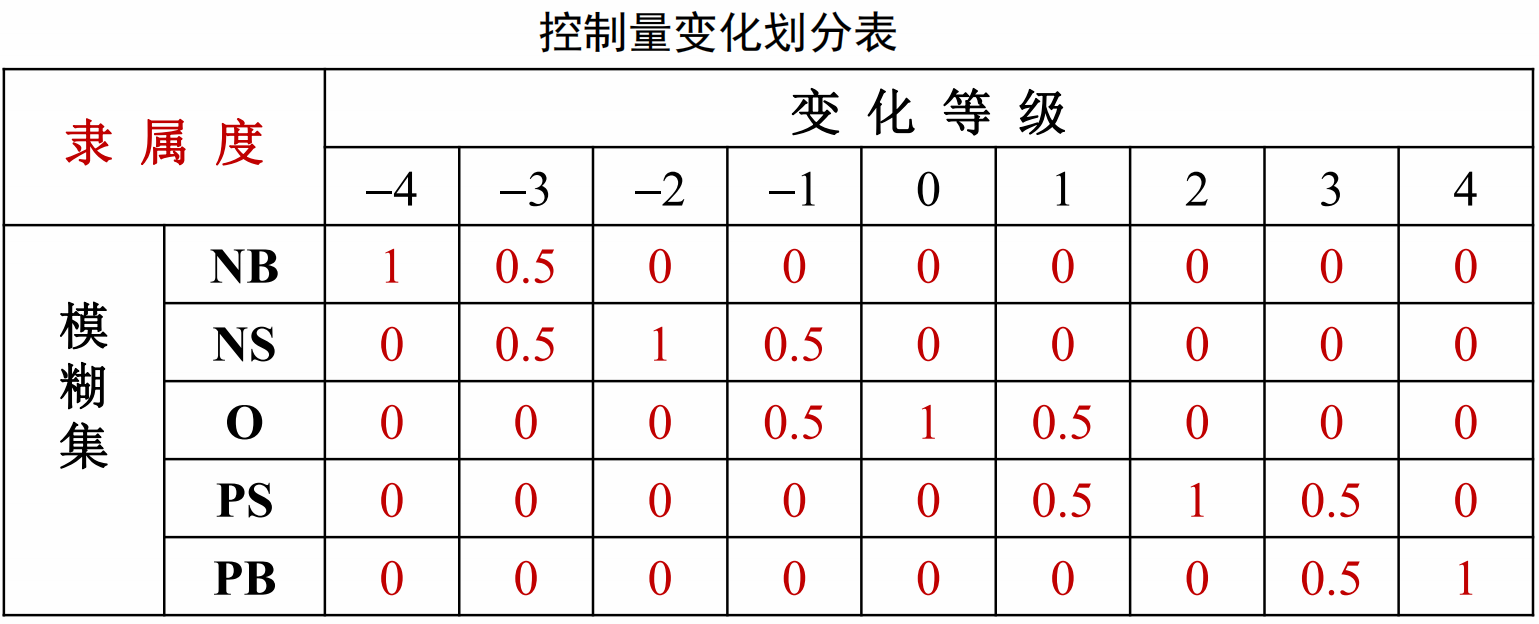
控制量 u 为调节阀门开度的变化。将其分为五级(模糊语言集):负大(NB),负小(NS),零(O),正小(PS),正大(PB)。并根据u 的变化范围分为九个等级(输出论域):-4, -3, -2, -1, 0, ?1, ?2, ?3, ?4 。得到控制量模糊划分表如下表:
模糊规则的描述
根据日常的经验,设计以下5条模糊规则,并用“ if A then B ” 形式来描述
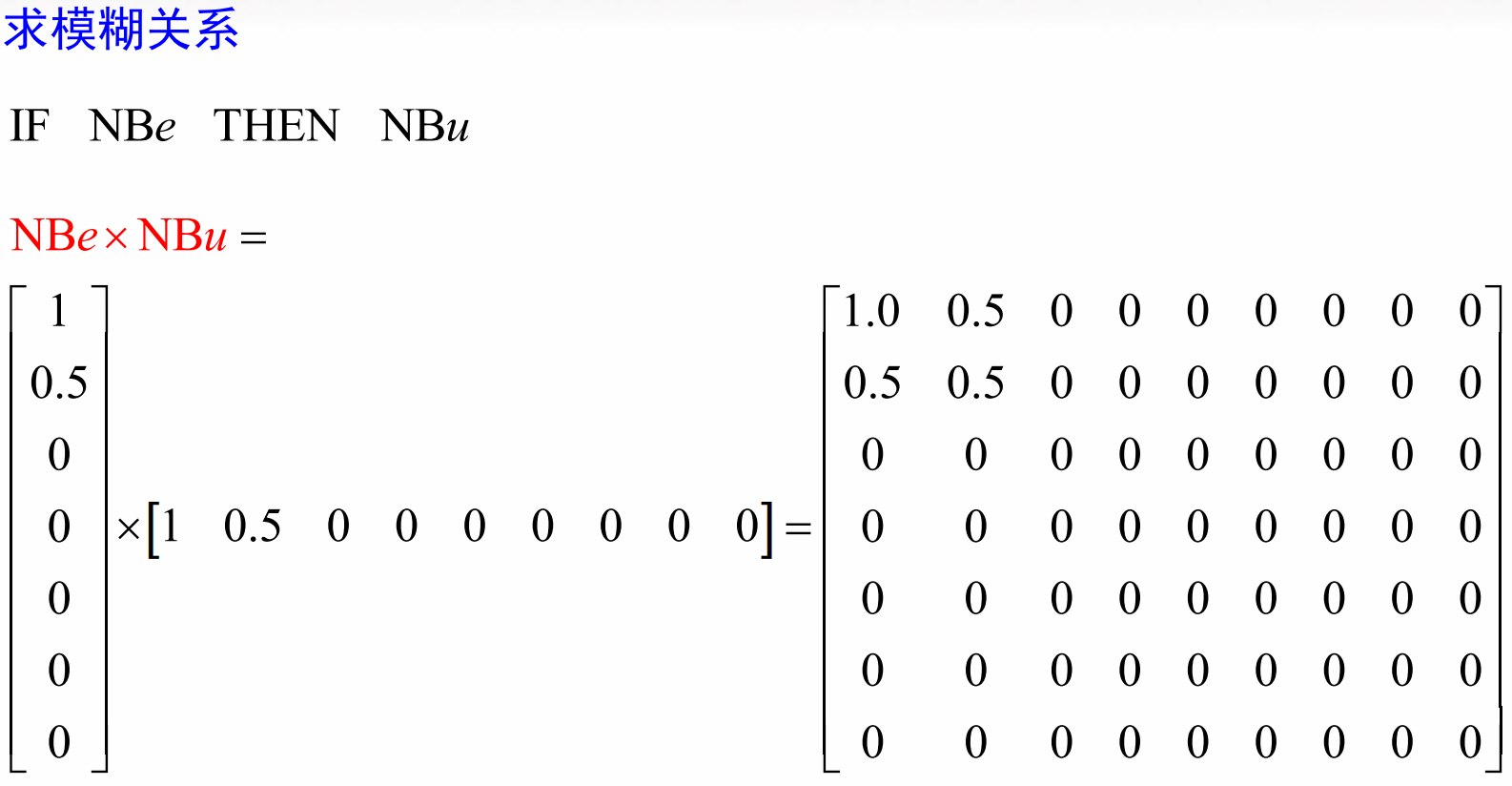
(1) “若 e 负大,则 u 负大” if e=NB then u=NB
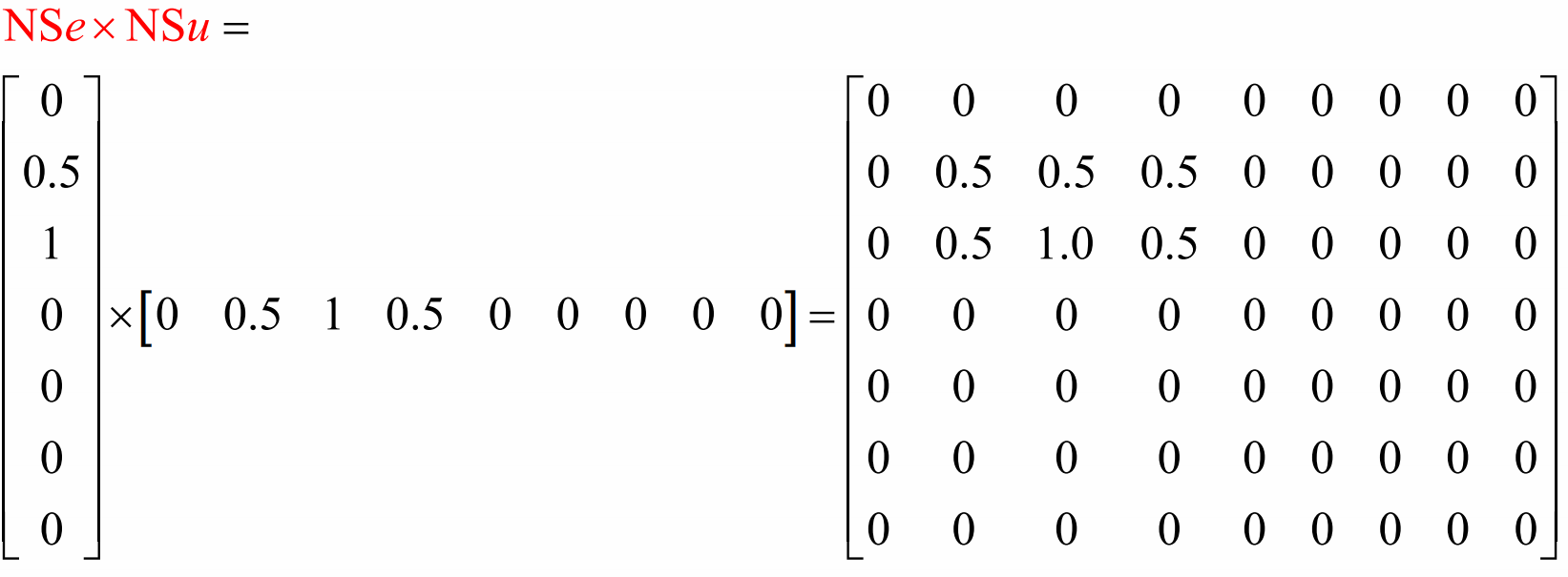
(2) “若 e 负小,则 u 负小” if e=NS then u=NS
(3) “若 e 为 0, 则 u 为0” if e=O then u=O
(4) “若 e 正小,则 u 正小” if e=PS then u=PS
(5) “若 e 正大,则 u 正大” if e=PB then u=PB
根据上述经验规则,可得模糊控制表如下所示:

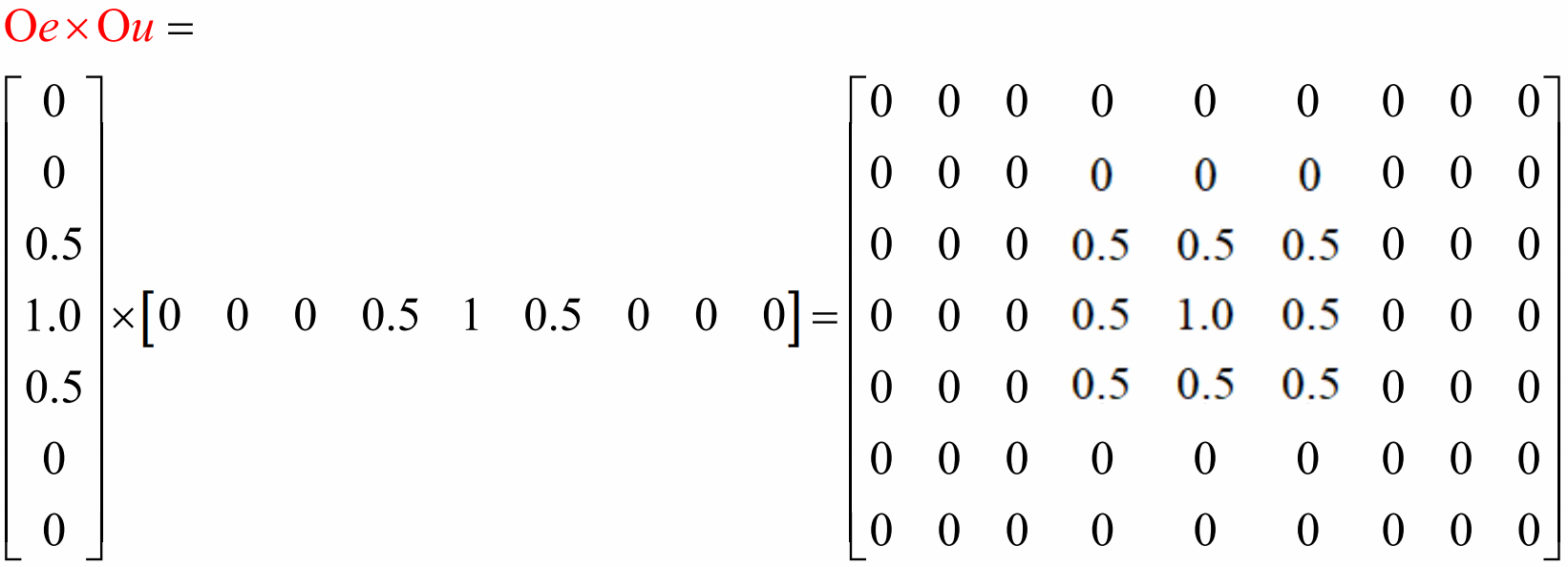
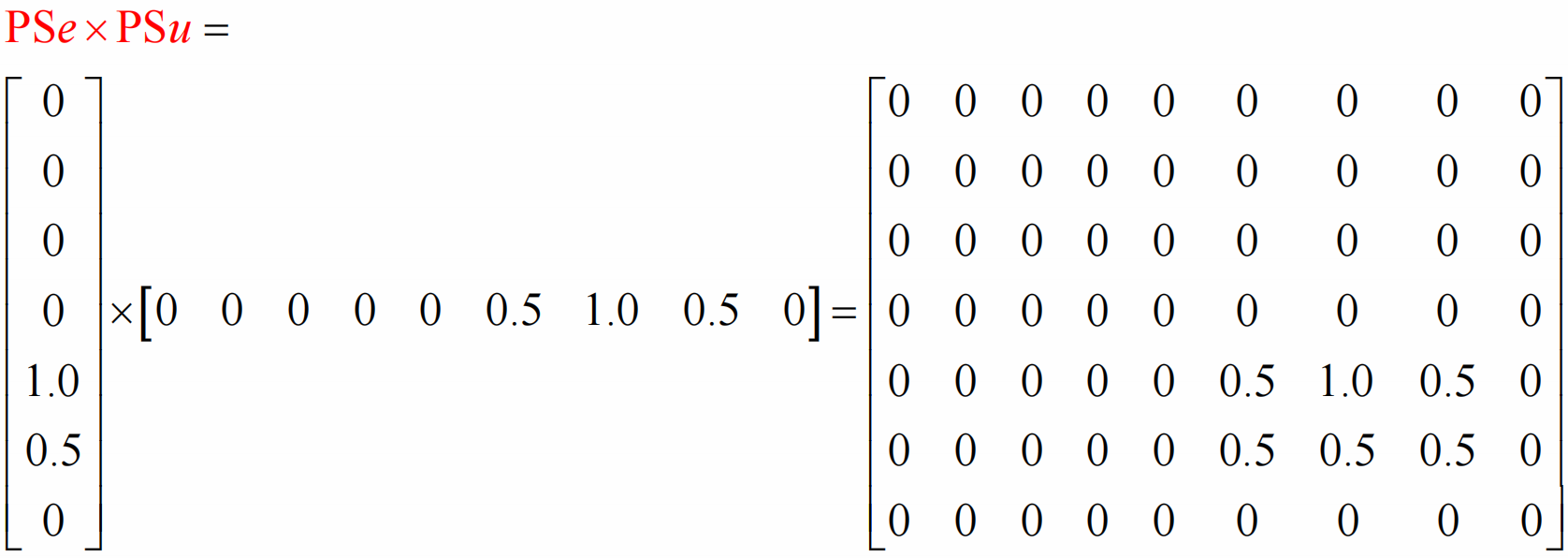
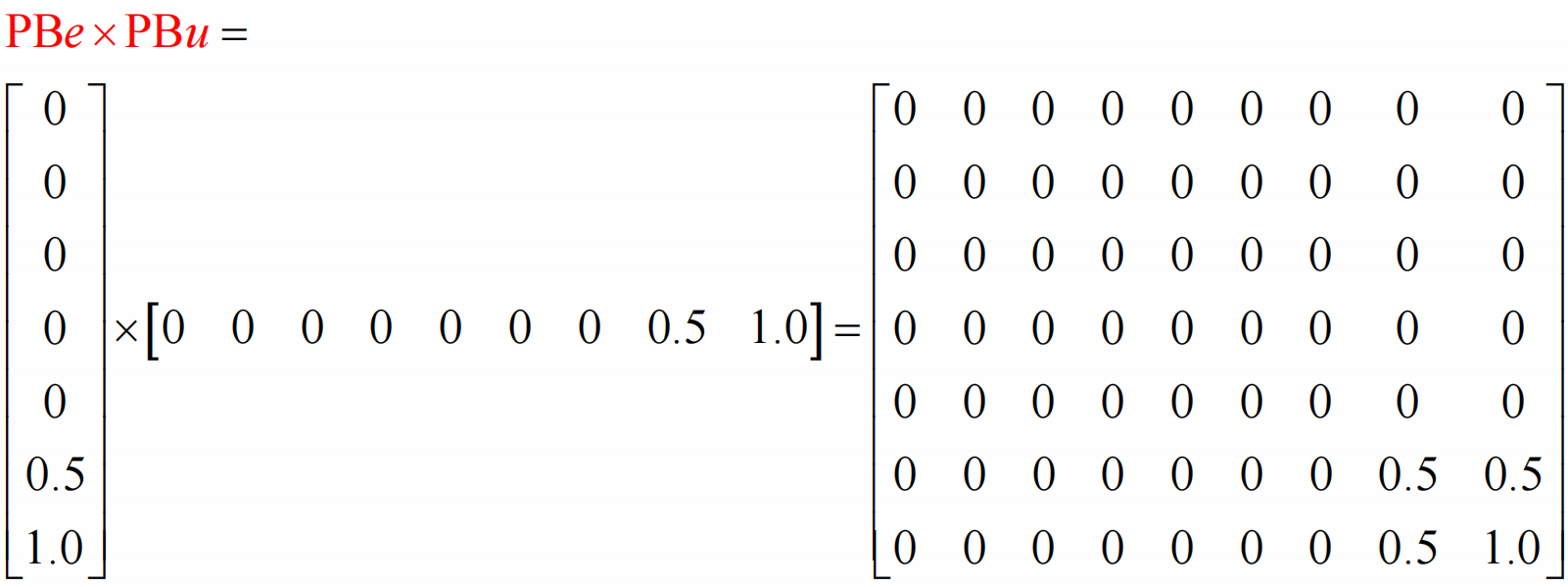
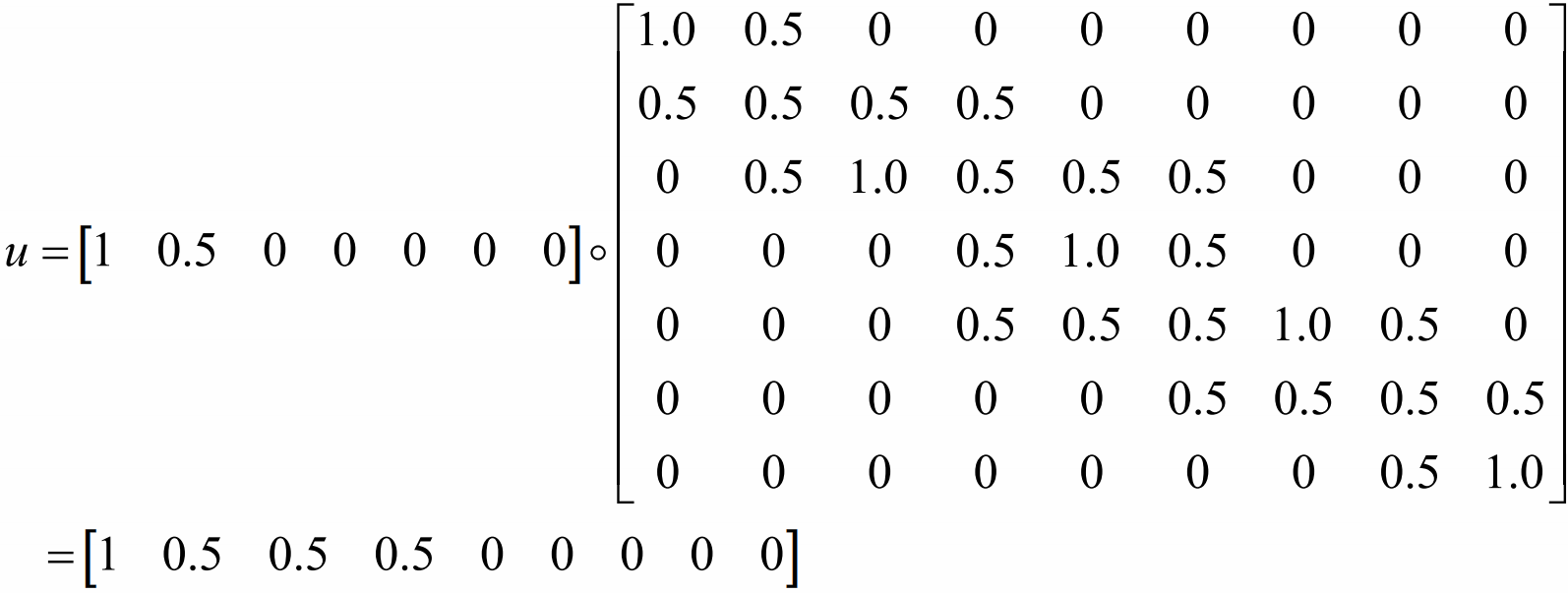
于是由以上五个模糊矩阵求并集(即隶属函数最大值),得模糊关系矩阵为:
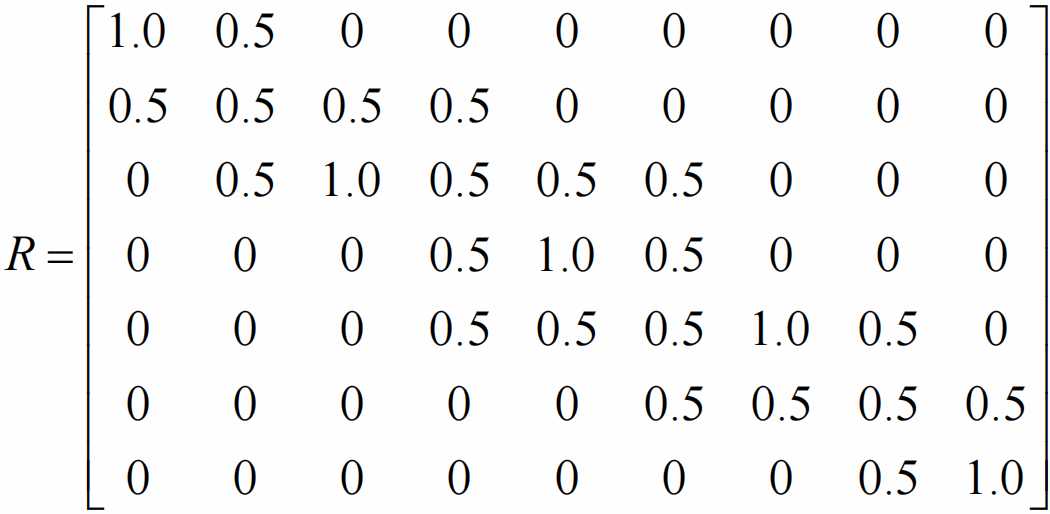
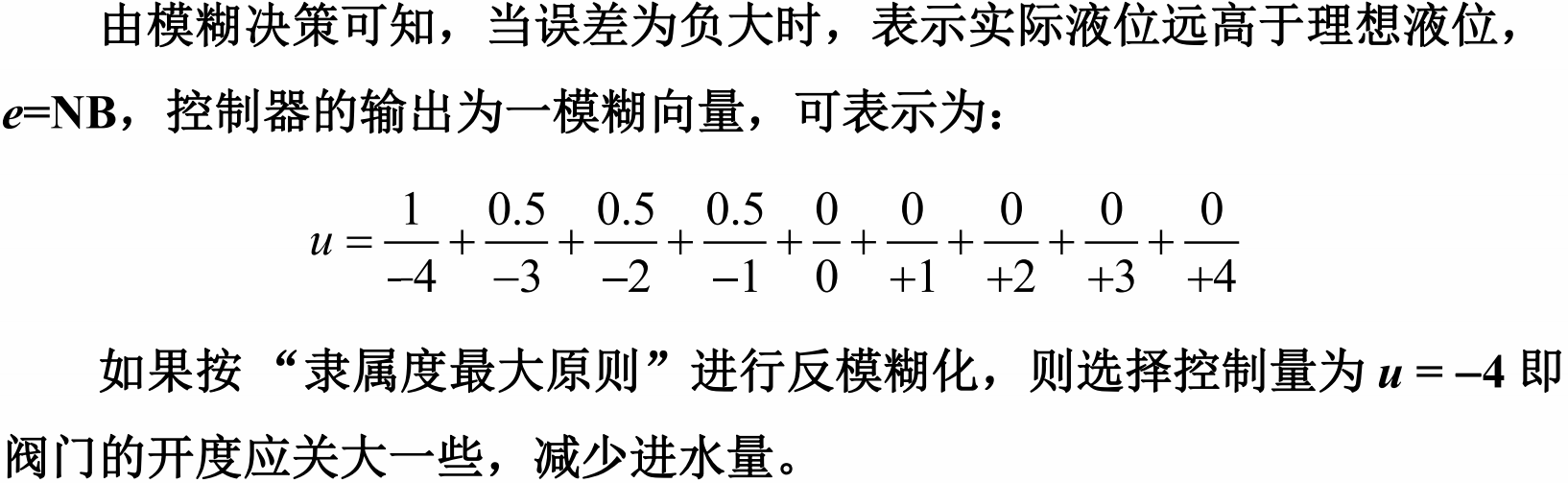
模糊决策
模糊控制器的输出为误差向量和已确立模糊关系的合成:例如当误差 e 为NB时,即 时,控制器输出为
控制量的反模糊化
模糊控制的改进
模糊控制与PID控制的结合
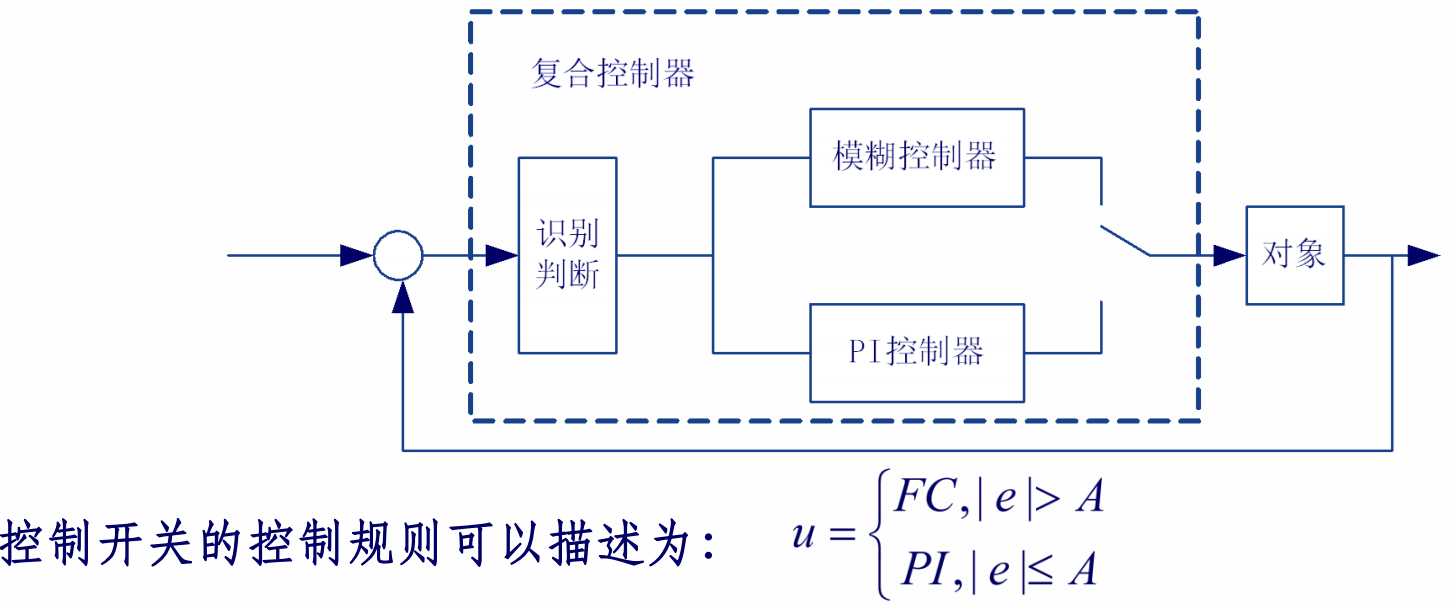
双模控制
双模控制器由模糊控制器和PI控制器并联组成。控制开关在系统误差较大时接通模糊控制器,来克服不确定性因素的影响;在系统误差较小时接通PI控制器来消除稳态误差。
串联控制

并联控制

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- php-m和phpinfo之间不一致的问题的可能原因和解决办法
- Ubuntu零基础教程
- MULTISCALE DOMAIN ADAPTIVE YOLO FOR CROSS-DOMAIN OBJECT DETECTION
- OpenAI发布官方提示工程指南和示例,全面使用攻略简单易学
- 按照层次遍历结果打印完全二叉树
- maven常见的报错集合及解决
- 基于深度学习的婴儿啼哭识别项目详解
- vue使用el-tag完成添加标签操作
- 兔单抗制备方法的发展-单B细胞技术-卡梅德生物
- 供应链管理是什么?专业就业前景如何?