yolov7 onnx推理
发布时间:2023年12月25日
环境介绍
- 用的mmyolo0.6.0导出的yolov7,如果导出模型有问题,参考我之前的文章。
- 我的数据集只有两个类别。
- 下图是我模型的输入输出。
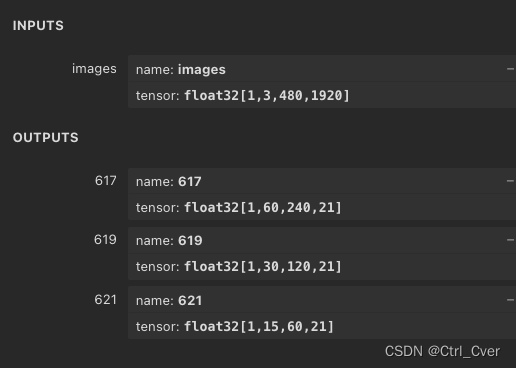
因为需要在边缘设备推理,所以先用python写一遍onnx的后处理。代码如下:
import onnxruntime
import numpy as np
import cv2
import os
import tqdm
from torchvision.ops import nms
import torch
# 指定 ONNX 模型文件路径
onnx_model_path = 'work_dir/best_coco_bbox_mAP_epoch_190.onnx'
sess = onnxruntime.InferenceSession(onnx_model_path)
anchor8 = np.loadtxt('anchor_60_240.txt')
anchor16 = np.loadtxt('anchor_30_120.txt')
anchor32 = np.loadtxt('anchor_15_60.txt')
strides = [8,16,32]
coco_classes = [
'person', 'soccer'
]
def softmax(x):
exp_x = np.exp(x - np.max(x)) # 避免指数溢出
return exp_x / exp_x.sum(axis=0, keepdims=True)
def sigmoid(x):
return 1 / (1 + np.exp(-x))
def get_color(idx):
idx += 3
return (37 * idx % 255, 17 * idx % 255, 29 * idx % 255)
def onnx_infer(img_path):
# 创建 ONNX 运行时的 Session
# 构造输入数据
img = cv2.imread(img_path)
img = cv2.resize(img,(1920,480))
timg = img[...,::-1]
input_data = np.transpose(timg,(2,0,1))[None,...]
input_data = np.array(input_data/255,dtype=np.float32)
# 进行推理
output_data = sess.run(['617','619','621'], {'images': input_data})
ans_bboxs = []
ans_score = []
ans_cat = []
for output,anchor,stride in zip(output_data,(anchor8,anchor16,anchor32),strides):
_,h,w,c = output.shape
pred = output.reshape(-1,c)
for i in range(h*w):
pix = pred[i]
shifty = (i//w)*stride
shiftx = (i%w)*stride
cur_anchor = anchor+[shiftx,shifty,shiftx,shifty]
for k in range(3):
xc = (cur_anchor[k][0]+cur_anchor[k][2])/2
yc = (cur_anchor[k][1]+cur_anchor[k][3])/2
wc = cur_anchor[k][2] - cur_anchor[k][0]
hc = cur_anchor[k][3] - cur_anchor[k][1]
xc_pred = (sigmoid(pix[k*7+0]) - 0.5)*2*stride+xc
yc_pred = (sigmoid(pix[k*7+1]) - 0.5)*2*stride+yc
w_pred = (sigmoid(pix[k*7+2])*2)**2*wc
h_pred = (sigmoid(pix[k*7+3])*2)**2*hc
bbox_score = sigmoid(pix[k*7+4])
if pix[k*7+5] > pix[k*7+6]:
cat_score = pix[k*7+5]
cat_ = 0
else:
cat_score = pix[k*7+6]
cat_ = 1
conf = sigmoid(cat_score)*bbox_score
ltx = xc_pred - w_pred/2
lty = yc_pred - h_pred/2
rtx = xc_pred + w_pred/2
rty = yc_pred + h_pred/2
if bbox_score > 0.1:
ans_bboxs.append([ltx,lty,rtx,rty])
ans_score.append(conf)
ans_cat.append(cat_)
# indices = cv2.dnn.NMSBoxes(ans_bboxs, ans_score,score_threshold=0.1, nms_threshold=0.55)
keep = nms(torch.Tensor(ans_bboxs), torch.Tensor(ans_score), iou_threshold=0.5)
ult_bbox = np.array(ans_bboxs)[keep]
ult_score = np.array(ans_score)[keep]
ult_cat = np.array(ans_cat)[keep]
for bbox,conf,cat in zip(ult_bbox,ult_score,ult_cat):
x0,y0,x1,y1 = bbox
cv2.rectangle(img,(int(x0),int(y0)),(int(x1),int(y1)),get_color(int(cat)),2,2)
label = f'{coco_classes[int(cat)]}: {conf:.2f}'
cv2.putText(img, label, (int(x0),int(y0) - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.5, get_color(int(cat)), 2)
cv2.imwrite(os.path.join('onnx_infer',img_path.split('/')[-1]),img)
if __name__ == '__main__':
data_root = 'mydemo/'
imgs = os.listdir(data_root)
for img in tqdm.tqdm(imgs):
if img.endswith('jpg') or img.endswith('png'):
onnx_infer(os.path.join(data_root,img))
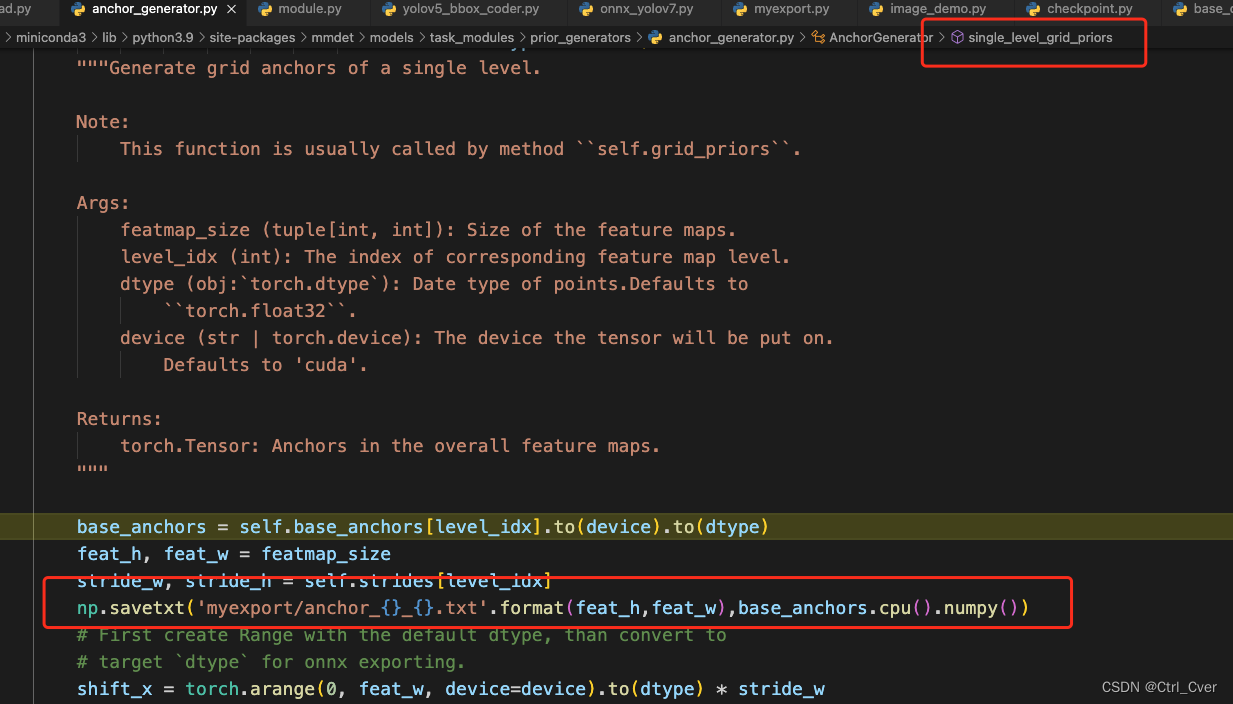
anchor是在下面这个文件保存的:
文章来源:https://blog.csdn.net/qq_33596242/article/details/135202147
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- [python]用python实现对arxml文件的操作
- C++ 类和对象 (上)
- mysql导入千万级别数据
- eBay上架商品搜索不出来怎么办?eBay怎么上架创建listing?-站斧浏览器
- 什么是API ?
- 计算机网络 网络层上 | IP数据报,IP地址,ICMP,ARP等
- 【LangChain学习之旅】—(4) 模型I/O:输入提示、调用模型、解析输出
- Android Studio离线开发环境搭建
- 使用usb转sata线外接sata硬盘安装centos,再换成直接接到sata口报错
- 锐捷 L2TP 配置