伺服电机:伺服电机的控制模式
一、伺服电机基本的控制模式
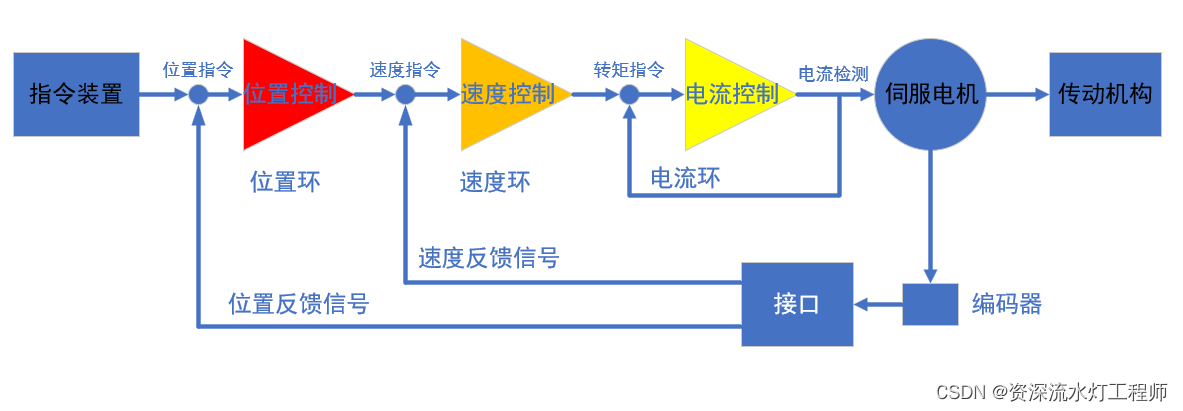
在AC伺服系统中,对编码器所发出的脉冲信号或伺服电机的电流进行检测,将检测结果反馈给伺服驱动器,伺服驱动器根据检测结果和相应的控制指令,对伺服电机进行相应的控制,根据指令的不同,伺服系统可分为三种控制模式:位置控制模式、速度控制模式、转矩控制模式。
位置控制模式:起主要作用的是位置环,根据编码器脉冲返回的位置信号进行位置控制,脉冲个数就可以表征位置;
速度控制模式:起主要作用的是速度环,也是根据编码器返回的脉冲,但是脉冲对时间求导就是速度了;
转矩控制模式:转矩与电流是直接相关,控制转矩就是控制电流,需要检测伺服驱动器的输出电流,根据电流反馈信号进行转矩控制。
电流环的响应速度最快,其次是速度环,位置环响应速度最慢;
从上图中可以看出:
位置控制模式使用的环有:位置环、速度环、电流环;
速度控制模式使用的环有:速度环、电流环;
转矩控制模式使用的环有:电流环;
?
二、位置模式
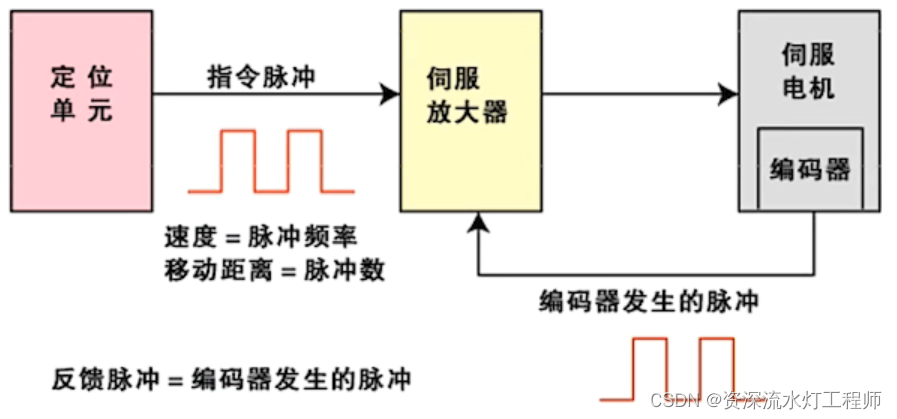
位置模式对速度和位置都有严格的控制,通过控制发送脉冲的频率,来确定电机的转动杆速度大小,通过控制发送脉冲的个数来确定转动的角度。位置模式主要用于需要定位控制的场合,如机械手、贴片机、雕刻机、数控机床等,自动化控制中,位置控制模式的应用范围最广。
位置控制模式的特点:
1、机械的移动量与指令脉冲的总数成正比;
2、机械的运动速度与指令脉冲的频率成正比;
3、在一个脉冲的范围内完成定位;
因此伺服系统中的位置精度由下面的因素决定:
1、伺服电机每转一圈,机械的移动量;
2、伺服电机每转一圈,编码器输出的脉冲个数,常见电机转1圈是发出10000个脉冲;
3、机械系统中的间隙误差;
位置模式由可以细分为绝对位置模式和相对位置模式
相对位置模式
所谓相对,就是指相对当前的位置再走一段距离,比如当前的位置是1000米,设置相对位置值为3000米,那么最终的位置是4000。
绝对位置模式
绝对,就是说一不二,说什么位置就是什么位置,别给我来什么换算,说1000,就是1000的位置,说3000就是3000的位置,如果当前的位置是1000,设置的绝对位置是3000,那电机就需要继续走2000米。
三、速度控制模式

伺服电机的速度控制模式可以实现宽范围的速度调节,速度波动小。
速度控制一般使用软启动、软停止功能,调整加减速运动中的加速度,避免对机械系统的冲击。
控制伺服电机的转动速度有两种方式,一种是通过控制发送给伺服控制器的脉冲频率来实现速度控制,这与位置模式是一样的。
另一种方式是通过模拟量的输入来控制转速,比如0--10V分别对应不同的速度,上位机给伺服控制的模拟输入口设置不同的电压值,伺服电机就按照对应的速度转动。
在速度模式下,伺服系统本身是无法做到精确定位的,如果想要实现精确定位,需要将电机的位置信号反馈给上位机,然后再由上位机进行运算控制。这是因为速度模式下,四度电机自身的编码器只用来检测电机的转速,不能进行位置监控,只能借助外面的位置传感器来监控位置。
四、转矩控制模式
所谓转矩模式,就是通过控制伺服电机的电流,以达到输出目标转矩的控制。
进行恒定的张力控制时,由于负载转矩会发生变化,因此需要对电机的输出转矩进行控制。半导体里面的晶圆键合就需要一个恒定的压力,可以使用转矩控制模式。
五、伺服电机的混合控制模式
伺服电机的混合控制模式是由基本模式组合而来,主要有速度--转矩模式、位置--速度模式、位置--转矩模式、位置--速度--转矩模式
?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【算法】最优贸易(反向建图)
- 英特尔深度相机D455实现YOLOv5+deeepsort行人车辆测速、测距、追踪
- 【ngrok】自己服务器简单搭建钉钉ngrok和一些免费内网穿透
- Banner设计专家详细解释和使用技巧!
- 多PC文件夹同步方案
- Oracle 19c OCP 1z0 082考场真题解析第27题
- React Hooks 面试题 | 05.精选React Hooks面试题
- SpringBoot 3.2.0实战
- C#winform上位机开发学习笔记4-串口助手的发送接收字节统计功能添加
- 从数据可视化到场景渲染:山海鲸的创新与实践