仿真机器人-深度学习CV和激光雷达感知(项目2)day6【数学基础-坐标变换】
前言
💫你好,我是辰chen,本文旨在准备考研复试或就业
💫本文内容是我为复试准备的第二个项目
💫欢迎大家的关注,我的博客主要关注于考研408以及AIoT的内容
🌟 预置知识:基本Python语法,基本linux命令行使用
以下的几个专栏是本人比较满意的专栏(大部分专栏仍在持续更新),欢迎大家的关注:
💥ACM-ICPC算法汇总【基础篇】
💥ACM-ICPC算法汇总【提高篇】
💥AIoT(人工智能+物联网)
💥考研
💥CSP认证考试历年题解
坐标变换的作用
把坐标在坐标系之间转换(把变换应用到一个坐标)
- 世界中有多个物体,想获取物体间的相对位置.
自动驾驶中,拿到了自车和附近其他车辆的坐标(世界坐标系),需要计算附近车辆与自车的相对位置,即把车辆坐标从世界坐标系转换到自车坐标系 - 机器人有多个组成部分,想获取各个部分的位置.
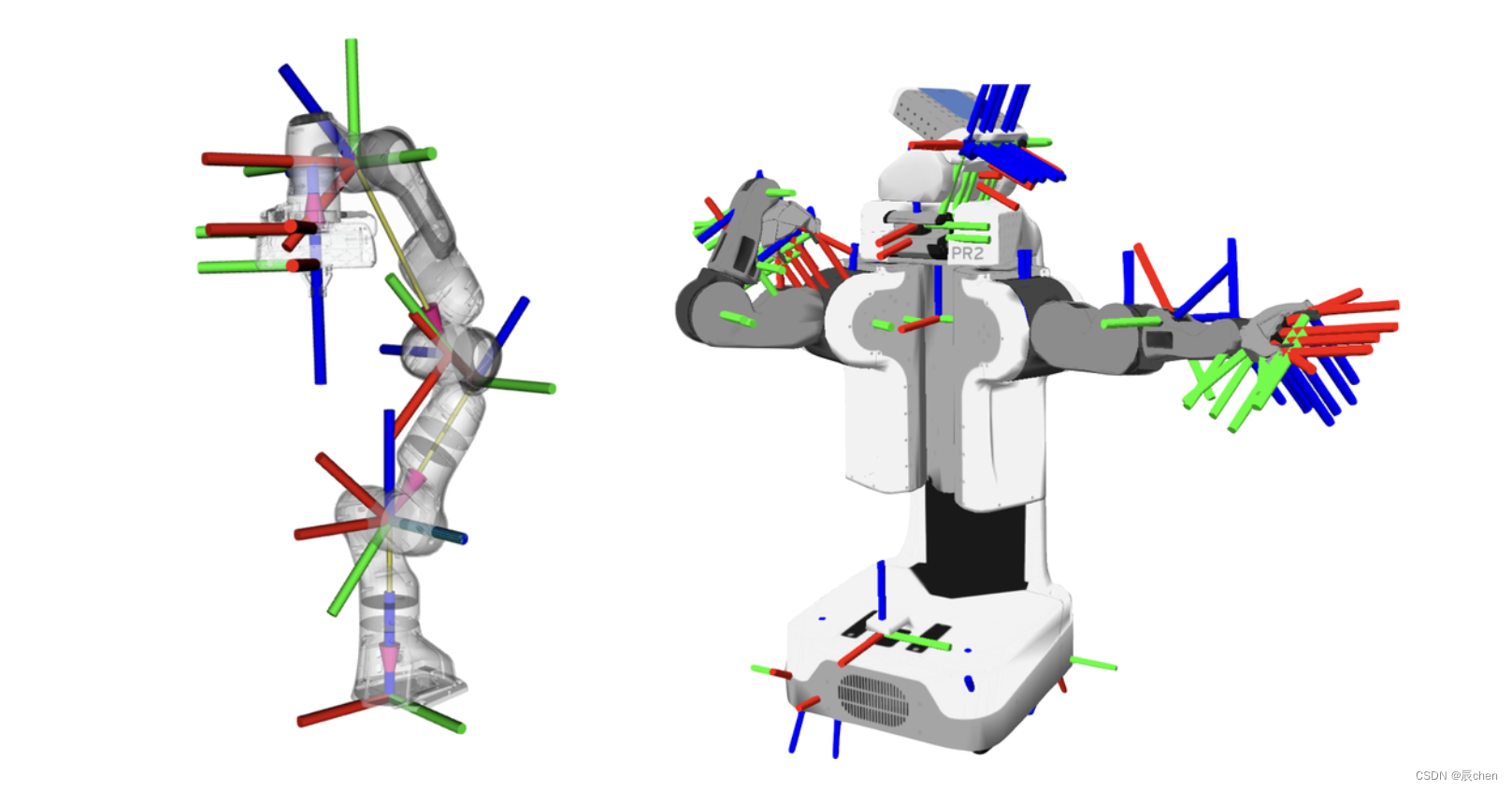
机械臂有多个关节,每个关节都对应一个坐标系,需要计算机械臂末端(机械手)相对于机械臂本体的位置,即把机械手坐标从自身坐标系转换到本体坐标系
定位节点发布地图到里程计的变换,里程计节点发布里程计到机器人的变换,需要计算机器人在地图中的位置,即把机器人坐标从里程计坐标系转换到地图坐标系
旋转与平移
二维变换
旋转

x
′
=
x
c
o
s
θ
?
y
s
i
n
θ
x'=xcos\theta-ysin\theta
x′=xcosθ?ysinθ
y
′
=
x
s
i
n
θ
+
y
c
o
s
θ
y'=xsin\theta+ycos\theta
y′=xsinθ+ycosθ
将上述表达式写成矩阵乘积的形式:
[ x ′ y ′ ] = [ c o s θ ? s i n θ s i n θ c o s θ ] [ x y ] \left[ \begin{matrix} x' \\ y' \\ \end{matrix} \right] = \left[ \begin{matrix} cos\theta & -sin\theta \\ sin\theta &cos\theta \\ \end{matrix} \right] \left[ \begin{matrix} x \\ y \\ \end{matrix} \right] [x′y′?]=[cosθsinθ??sinθcosθ?][xy?]
上图中,点逆时针旋转 θ \theta θ,等价于坐标系顺时针旋转 θ \theta θ,假设原坐标系为 A,坐标系顺时针旋转 θ \theta θ 后得到坐标系 B
定义符号:
- P m A : P_m^A: PmA?: 点 m m m 在坐标系 A A A 下的坐标
- R A B : R_A^B: RAB?: 坐标系 A A A 到 B B B 的旋转矩阵
只考虑旋转,则有 P m B = R A B × P m A P_m^B=R_A^B×P_m^A PmB?=RAB?×PmA?
平移
[
x
′
y
′
]
=
[
x
y
]
+
[
t
x
t
y
]
\left[ \begin{matrix} x' \\ y' \\ \end{matrix} \right] = \left[ \begin{matrix} x \\ y \\ \end{matrix} \right] + \left[ \begin{matrix} t_x \\ t_y \\ \end{matrix} \right]
[x′y′?]=[xy?]+[tx?ty??]
定义符号:
- P A o r g B : P_{Aorg}^B: PAorgB?: 坐标系 A 的原点在坐标系 B 中的位置
只考虑平移,则有 P m B = P m A + P A o r g B P_m^B=P_m^A+P_{Aorg}^B PmB?=PmA?+PAorgB?
推广到三维
[ x A y A z A ] = [ cos ? ? i B , i A ? cos ? ? j B , i A ? cos ? ? k B , i A ? cos ? ? i B , j A ? cos ? ? j B , j A ? cos ? ? k B , j A ? cos ? ? i B , k A ? cos ? ? j B , k A ? cos ? ? k B , k A ? ] [ x B y B z B ] = R [ x B y B z B ] \begin{bmatrix} x_A \\ y_A \\ z_A \end{bmatrix}= \begin{bmatrix} \cos \langle i_B, i_A \rangle & \cos \langle j_B, i_A \rangle & \cos \langle k_B, i_A \rangle \\ \cos \langle i_B, j_A \rangle & \cos \langle j_B, j_A \rangle & \cos \langle k_B, j_A \rangle \\ \cos \langle i_B, k_A \rangle & \cos \langle j_B, k_A \rangle & \cos \langle k_B, k_A \rangle \end{bmatrix} \begin{bmatrix} x_B \\ y_B \\ z_B \end{bmatrix} = R \begin{bmatrix} x_B \\ y_B \\ z_B \end{bmatrix} ?xA?yA?zA?? ?= ?cos?iB?,iA??cos?iB?,jA??cos?iB?,kA???cos?jB?,iA??cos?jB?,jA??cos?jB?,kA???cos?kB?,iA??cos?kB?,jA??cos?kB?,kA??? ? ?xB?yB?zB?? ?=R ?xB?yB?zB?? ?
推导过程无需掌握,推导过程可见博客:3. 机器人正运动学—坐标系及其变换
平移矩阵与二维类似。
齐次坐标
问题引入
一个完整的变换包括平移和旋转: P m B = R A B × P m A + P A o r g B P_m^B=R_A^B×P_m^A+P_{Aorg}^B PmB?=RAB?×PmA?+PAorgB?
但这种描述不够紧凑,面对多重连续变换时,会变得很臃肿:
P
m
C
=
R
B
C
×
(
R
A
B
×
P
m
A
+
P
A
o
r
g
B
)
+
P
B
o
r
g
C
P_m^C=R_B^C×(R_A^B×P_m^A+P_{Aorg}^B)+P_{Borg}^C
PmC?=RBC?×(RAB?×PmA?+PAorgB?)+PBorgC?
Q:有没有方法仅使用一次矩阵乘法,就同时完成平移和旋转?
A:有,使用齐次坐标
定义
用 n+1 维向量来表示 n 维空间的点
[
x
y
]
→
[
x
y
1
]
\left[ \begin{matrix} x \\ y \\ \end{matrix} \right] \rightarrow \left[ \begin{matrix} x \\ y \\ 1 \\ \end{matrix} \right]
[xy?]→
?xy1?
?
在原有旋转矩阵的基础上扩展一维用于容纳平移关系
用法
[ a ′ 1 ] = [ R t 0 T 1 ] [ a 1 ] ? T [ a 1 ] \begin{bmatrix} a' \\ 1 \end{bmatrix}= \begin{bmatrix} R & t \\ 0^T & 1 \end{bmatrix} \begin{bmatrix} a \\ 1 \end{bmatrix} \triangleq T \begin{bmatrix} a \\ 1 \end{bmatrix} [a′1?]=[R0T?t1?][a1?]?T[a1?]
[ P M A 1 ] = T B A ? [ P M B 1 ] \begin{bmatrix} P^A_M \\ 1 \end{bmatrix}= T_B^{A} \cdot \begin{bmatrix} P^B_M \\ 1 \end{bmatrix} [PMA?1?]=TBA??[PMB?1?]
T B A = [ R B A P B o r g A 0 1 ] T_B^{A} = \begin{bmatrix} R_B^A & P_{Borg}^A \\ 0 & 1 \end{bmatrix} TBA?=[RBA?0?PBorgA?1?]
变换矩阵
定义符号
- T A B : T_A^B: TAB?: 坐标系 A 到 B 的变换矩阵
使用变换矩阵同时进行旋转和平移
P
m
B
=
T
A
B
×
P
m
A
P_m^B=T_A^B×P_m^A
PmB?=TAB?×PmA?
可以连续变换:
P
m
C
=
T
B
C
×
T
A
B
×
P
m
A
P_m^C=T_B^C×T_A^B×P_m^A
PmC?=TBC?×TAB?×PmA?
参考视频辅助理解(视频中的缩放矩阵用不到,无需理解):无所不能的矩阵 - 三维图形变换
旋转的其他表示方法*
* 扩展内容,了解其存在和作用即可
- 旋转矩阵
- 优点:可以直接进行矩阵运算
- 缺点:元素多,占用空间大(n 维空间需要 n * n 个元素)
- 欧拉角
[Roll, Pitch, Yaw]- 优点:直观,方便人类理解
- 缺点:万向节死锁,即在某些角度下丢失一个方向上的旋转能力(这个不重要,了解即可),详细可参考视频:无伤理解欧拉角中的“万向死锁”现象

- 四元数
[x, y, z, w]- 优点:能表示所有选抓(没有万向节死锁)
- 缺点:不能直观读懂
旋转矩阵、欧拉角、四元数之间可以进行转换,转换过程涉及到大量数学细节,不需要掌握。编程中,有现成的数学库实现了转换功能,直接使用即可。
上述所有内容出处如下,博主在此基础上仅为添加个人理解:
本项目为北大团队出品【项目三:深度学习&仿真机器人 - 丘丘老师】原创(部分代码为开源代码)。课程团队:B站ID【M学长的考研top帮】UID【3546580235848566】复试项目班QQ大群:885884619,负责人QQ:674799
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【INTEL(ALTERA)】 quartus 使用F-Tile HDMI IP 编译时间长怎么办
- Python:使用networkx库来实现DAG的构建、拓扑排序
- 【面试 - 八股文】Linux 高频面试题,吊打面试官
- 七省数据局密集挂牌,期待规范引领数据行业蓬勃发展
- C# 继承
- yolov5 主要流程
- easyrecovery16 (硬盘数据恢复软件)免费版
- 0基础转行做软件测试?一文教小白拿到初级岗位offer?
- 10 个免费好用的图像压缩软件
- Java实现五子棋(保姆级教学)