现控散落知识点梳理【自用/最新】
这里写目录标题
悬而未决之谜
?结合能控分解思考,非奇异线性变换会不会导致某变量的可控可观性发生变化?
事实上,进行线性变换(能控/能观分解)后,状态变量的物理意义已经发生变化。
原问题我想问的意思其实是,任给一个矩阵A,可否知道每个状态是否可观/可控,应该可以用PBH判据判断【不太确定】
?如图所示与时域结合时,传递函数是开环or闭环?

应该是对应的闭环传递函数,是直接连接输入和输出、没有反馈部分的
——但是要注意 在现控中往往没有开环/闭环概念
?对于一般状态,给出ABC,怎么判断每个变量的能控能观性?【非上三角/下三角】
回答:就是能控能观分解呗
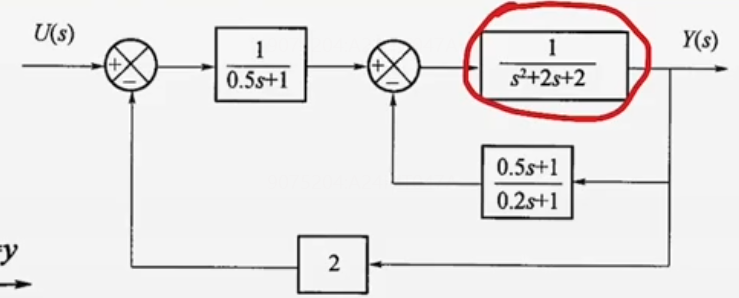
状态函数结构图
要点🌟
- 在每一个方框图之后加入变量x
- 如果传递函数为高阶,可以部分分式展开,则展开
-
- 若不可以,则组合设置两个状态变量,其中一个状态变量为另一状态变量的导数 x ˙ 1 \dot x_1 x˙1? 或者 使用反馈结构
- 若展开后,分子还有项,则进行并联
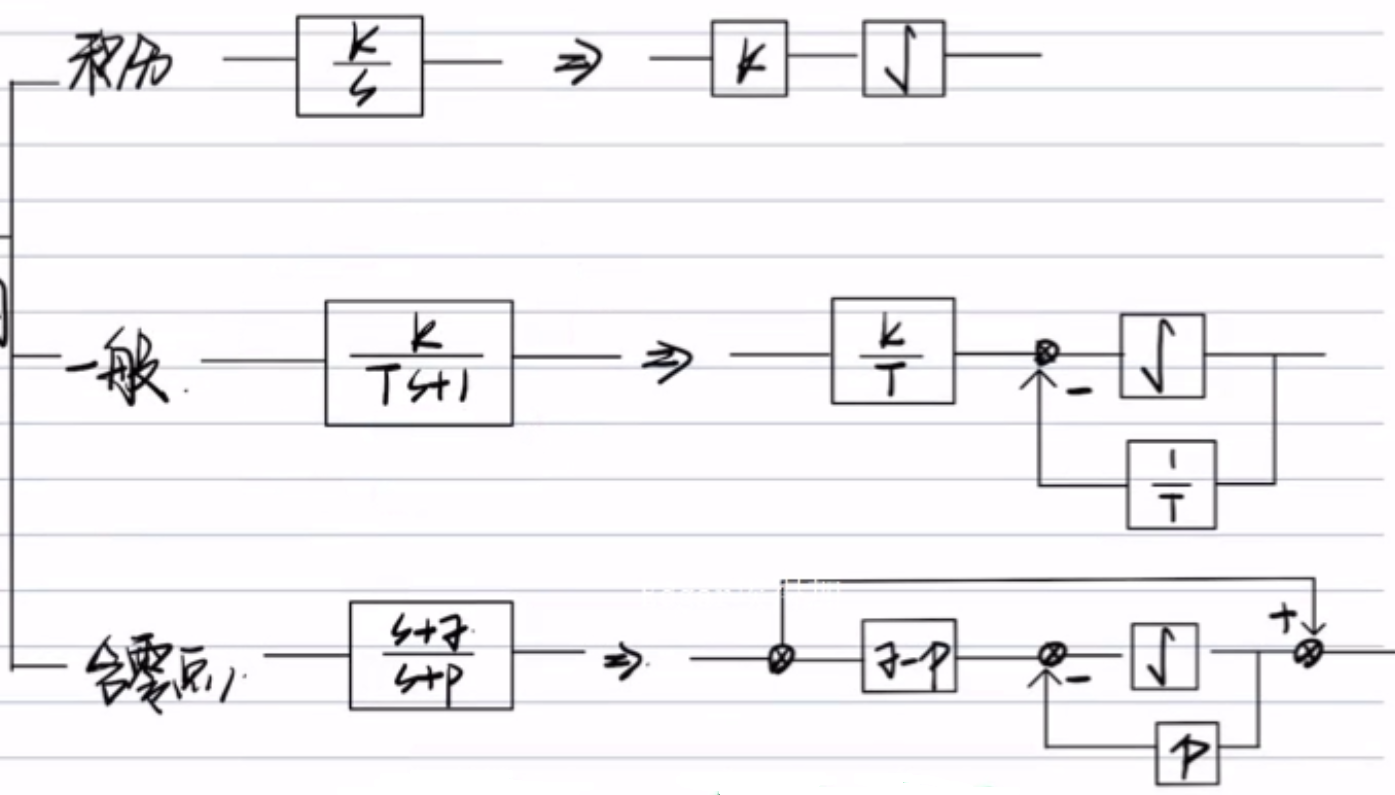
- 如上图所示,如果出现分子分母同阶,说明动态方程中的D可能不为0,y和u可能直接相关【其实就是上面结论的推论】
举例1 传递函数有分子-改并联+传递函数高阶分母-部分分式展开


注:上面的部分也可以改成积分环节和惯性环节串联
举例2 传递函数分母无法进行部分分式展开法 组合设置两个状态变量状态变量的导数

举例3 不可部分分式展开,也可以考虑用反馈环节

举例4 所有的惯性环节都可以用反馈环节代替之【这个例子也告诉我们有常数项时,变量的选取应该放在积分后而非整个传函后】

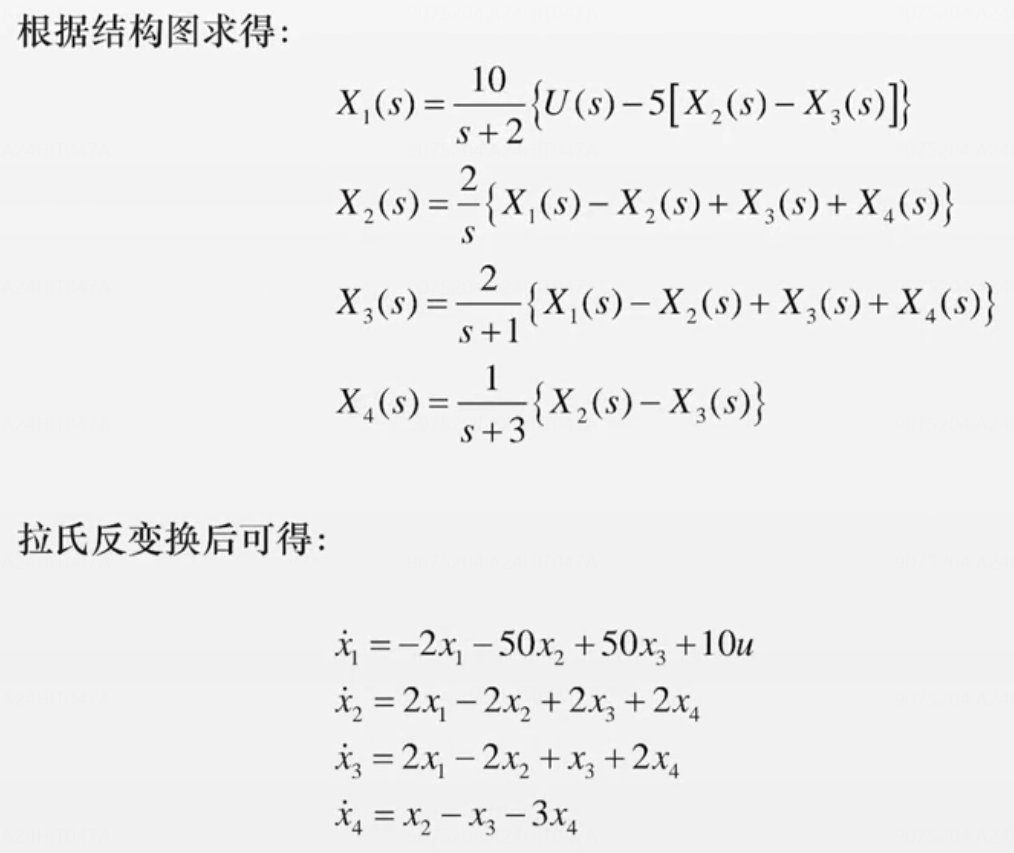
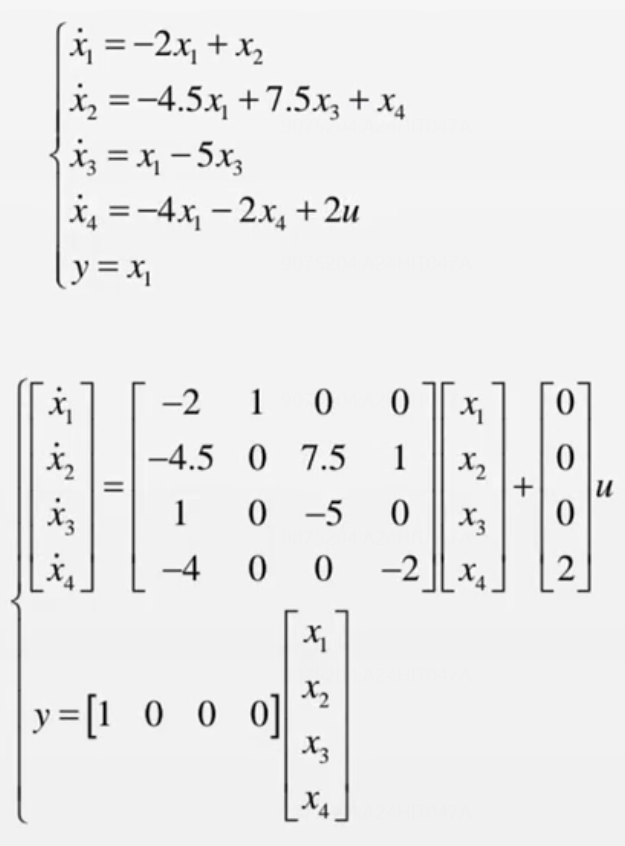
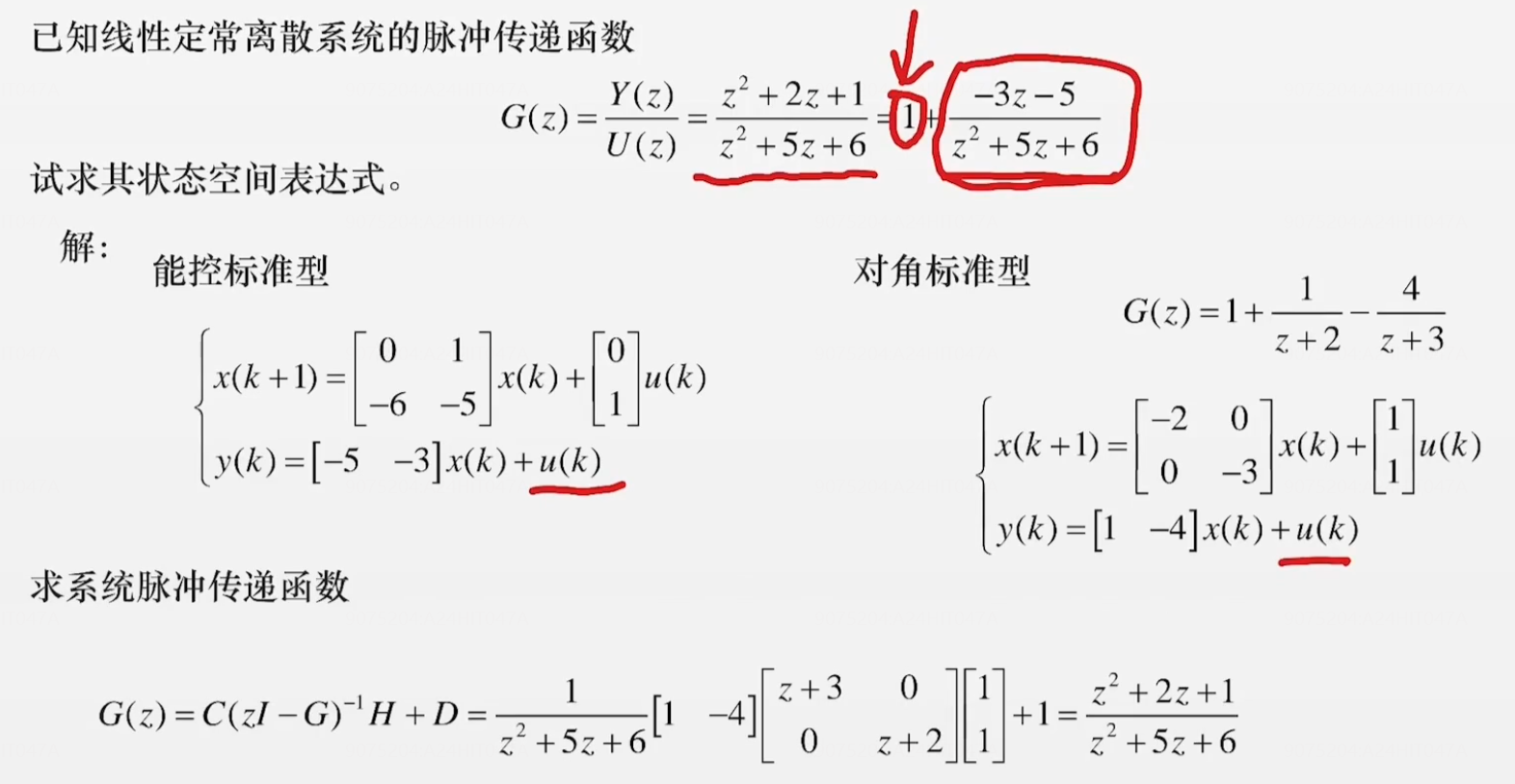
已知传递函数求状态方程矩阵
要点
- 注意分母 s n s^n sn的最高阶前的系数是1
- 可控型(I型)和可观型(II)型互为对称
- 要掌握可控/可观/约旦阵的结构图形式
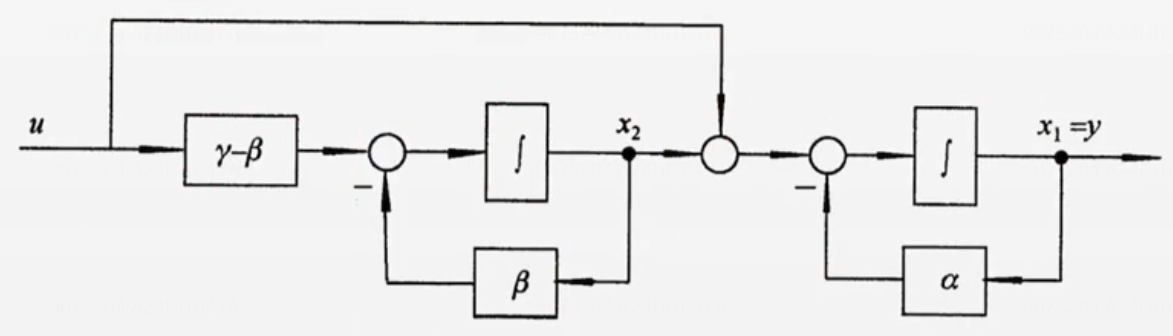
能控结构图
从输入唯一性和三个积分环节入手,确定三个变量的顺序
【 x 3 x_3 x3?和输入有关,更靠近输入】

能观结构图
从输出唯一性和三个积分环节入手
【 x 3 x_3 x3?和输出有关,更靠近输出】(和能控性中的完全相反)
约旦标准型
根据特征值数目不同,有不同条支路并联

可控/可观/约旦阵的选取方式
- 要了解可控/可观/约旦阵的状态变量选取方式
- 能控选取方式
{ x 1 = y x 2 = y ˙ ? x n = y ( n ? 1 ) \left\{\begin{array}{c} x_{1}=y \\ x_{2}=\dot{y} \\ \vdots \\ x_{n}=y^{(n-1)} \end{array}\right. ? ? ??x1?=yx2?=y˙??xn?=y(n?1)? - 约旦选取方式
{ X 1 ( s ) = 1 s ? λ 1 X 2 ( s ) ? x ˙ 1 = λ 1 x 1 + x 2 X 2 ( s ) = 1 s ? λ 1 X 3 ( s ) ? x ˙ 2 = λ 1 x 2 + x 3 X 3 ( s ) = 1 s ? λ 1 U ( s ) ? x ˙ 3 = λ 1 x 3 + u X 4 ( s ) = 1 s ? λ 2 U ( s ) ? x ˙ 4 = λ 2 x 4 + u ? X n ( s ) = 1 s ? λ n ? 2 U ( s ) ? x ˙ n = λ n ? 2 x n + u \left\{\begin{array}{c} X_{1}(s)=\frac{1}{s-\lambda_{1}} X_{2}(s) \Rightarrow \dot{x}_{1}=\lambda_{1} x_{1}+x_{2} \\\\ X_{2}(s)=\frac{1}{s-\lambda_{1}} X_{3}(s) \Rightarrow \dot{x}_{2}=\lambda_{1} x_{2}+x_{3} \\\\ X_{3}(s)=\frac{1}{s-\lambda_{1}} U(s) \Rightarrow \dot{x}_{3}=\lambda_{1} x_{3}+u \\\\ X_{4}(s)=\frac{1}{s-\lambda_{2}} U(s) \Rightarrow \dot{x}_{4}=\lambda_{2} x_{4}+u \\ \vdots \\ X_{n}(s)=\frac{1}{s-\lambda_{n-2}} U(s) \Rightarrow \dot{x}_{n}=\lambda_{n-2} x_{n}+u \end{array}\right. ? ? ??X1?(s)=s?λ1?1?X2?(s)?x˙1?=λ1?x1?+x2?X2?(s)=s?λ1?1?X3?(s)?x˙2?=λ1?x2?+x3?X3?(s)=s?λ1?1?U(s)?x˙3?=λ1?x3?+uX4?(s)=s?λ2?1?U(s)?x˙4?=λ2?x4?+u?Xn?(s)=s?λn?2?1?U(s)?x˙n?=λn?2?xn?+u?
- 能控选取方式
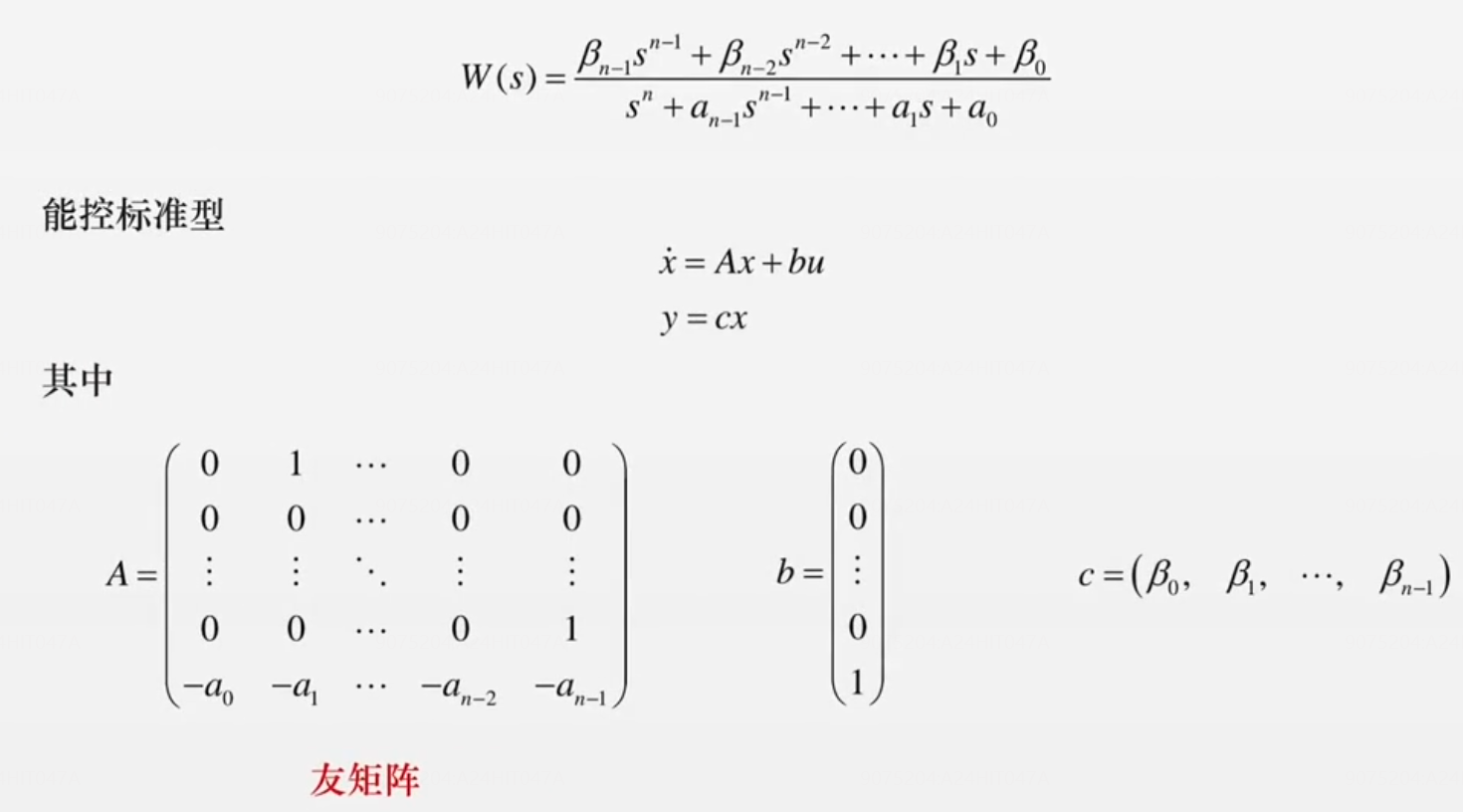
可控型表达式🌟🌟
可观型表达式🌟🌟

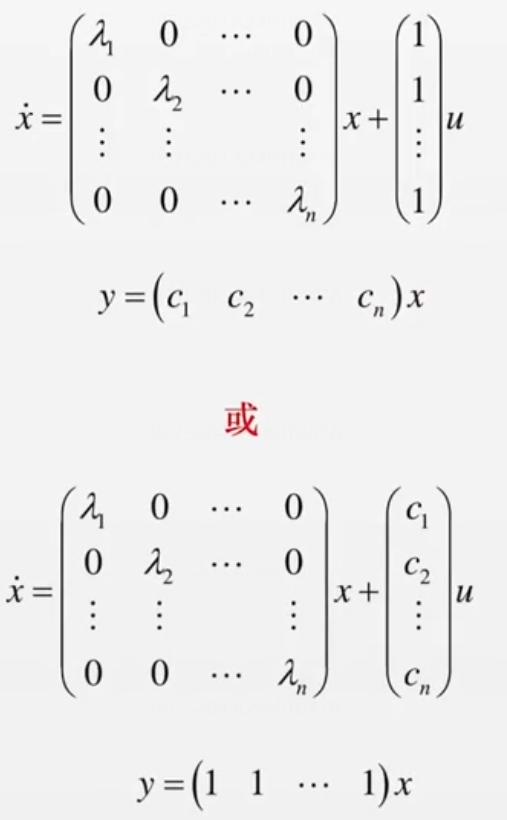
约旦/对角阵
普通对角
传递函数
矩阵类型
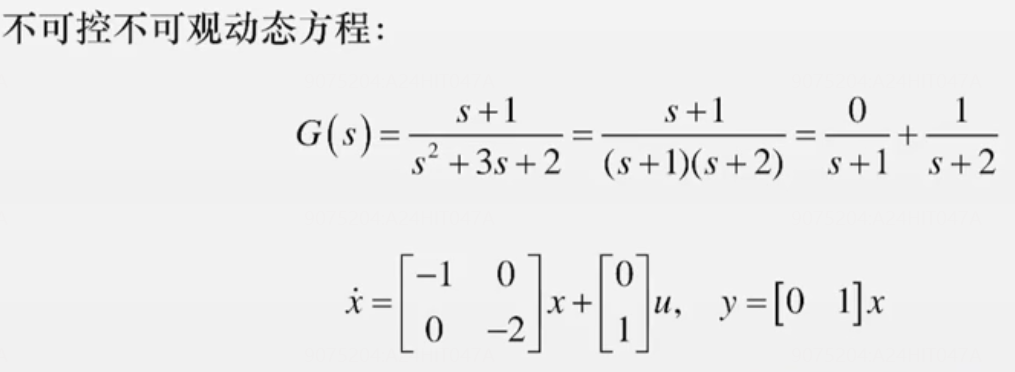
补充:如果发生零极点对消,且要求列写不能控不能观??
分析:如果产生零极点对消,相当于对应的状态变量“消失了”。因此之前的“全1行/列”中,该状态变量对应的1可以改为0
举例:传递函数如图

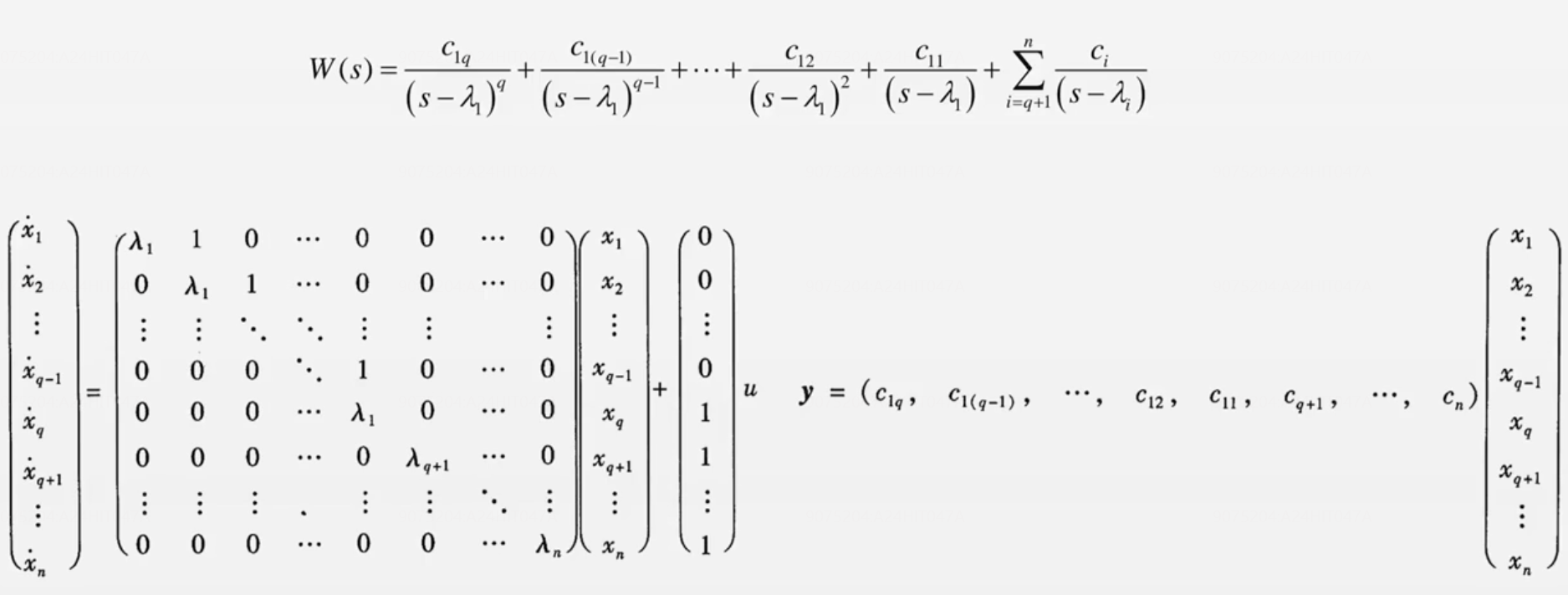
约旦对角【有重根】🌟🌟
传递函数

矩阵类型
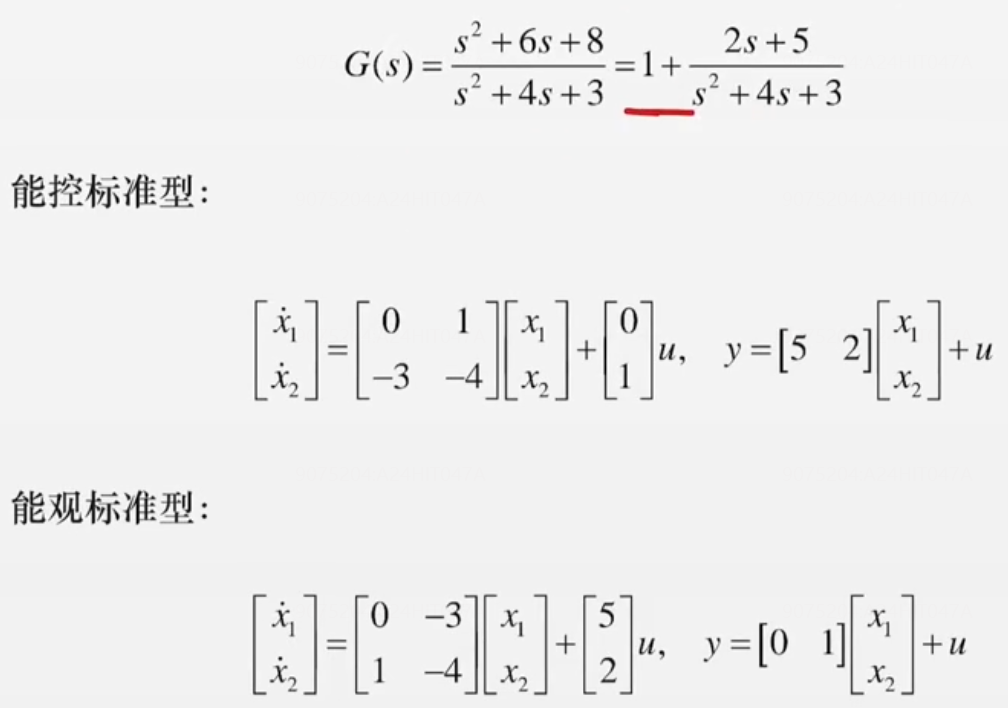
举例1 传递函数上下齐次
此时应该先提取常数项,变成分母阶次比分子高,再进行操作
注意此时的输出,需要加u的常数项倍
离散状态空间及定常方程*极大概率不考

结构图
注意把积分环节改成延迟环节

连续系统离散化
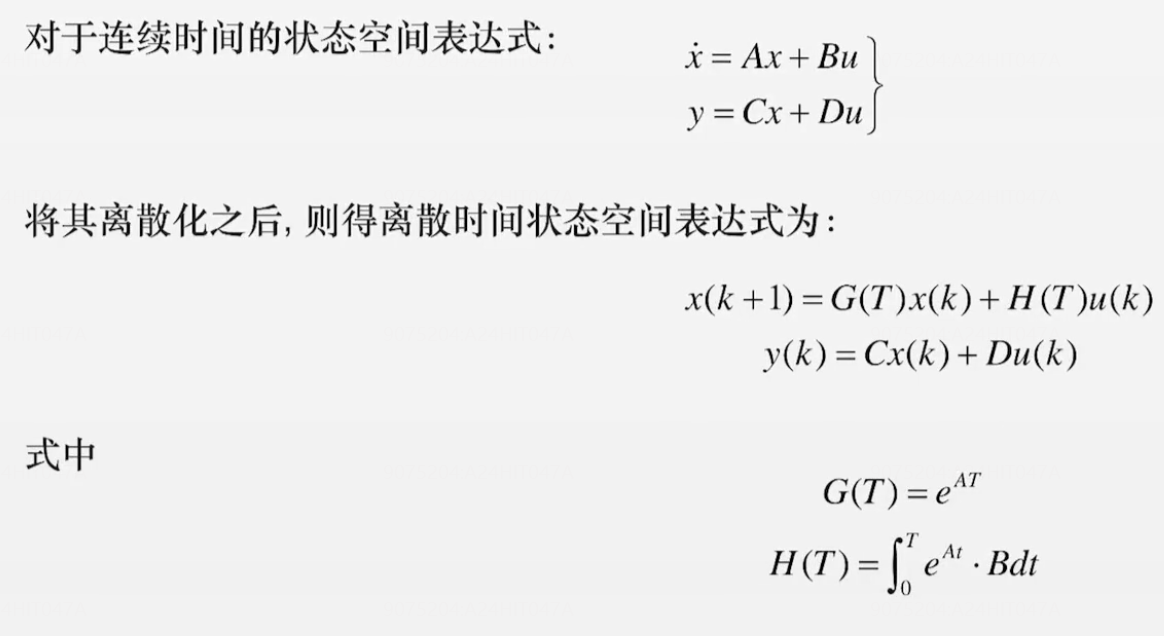
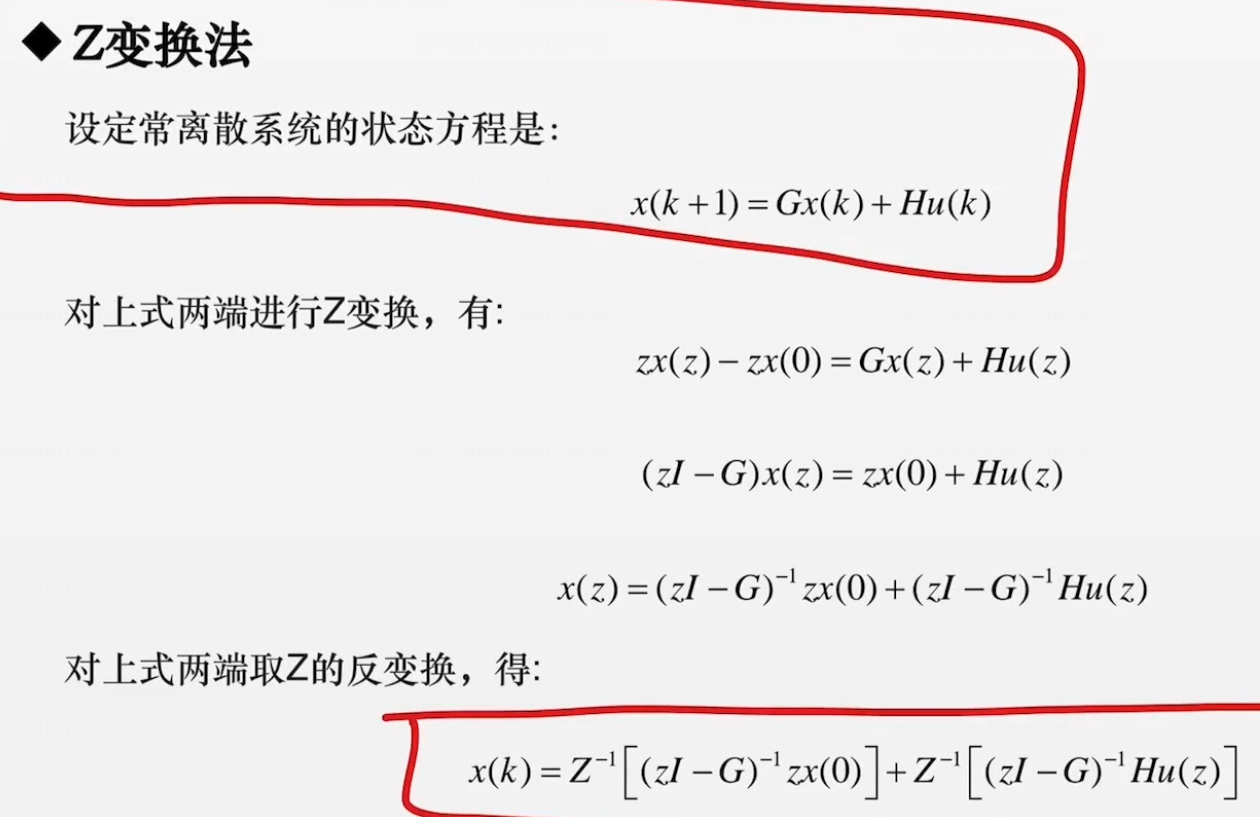
离散系统状态转移方程
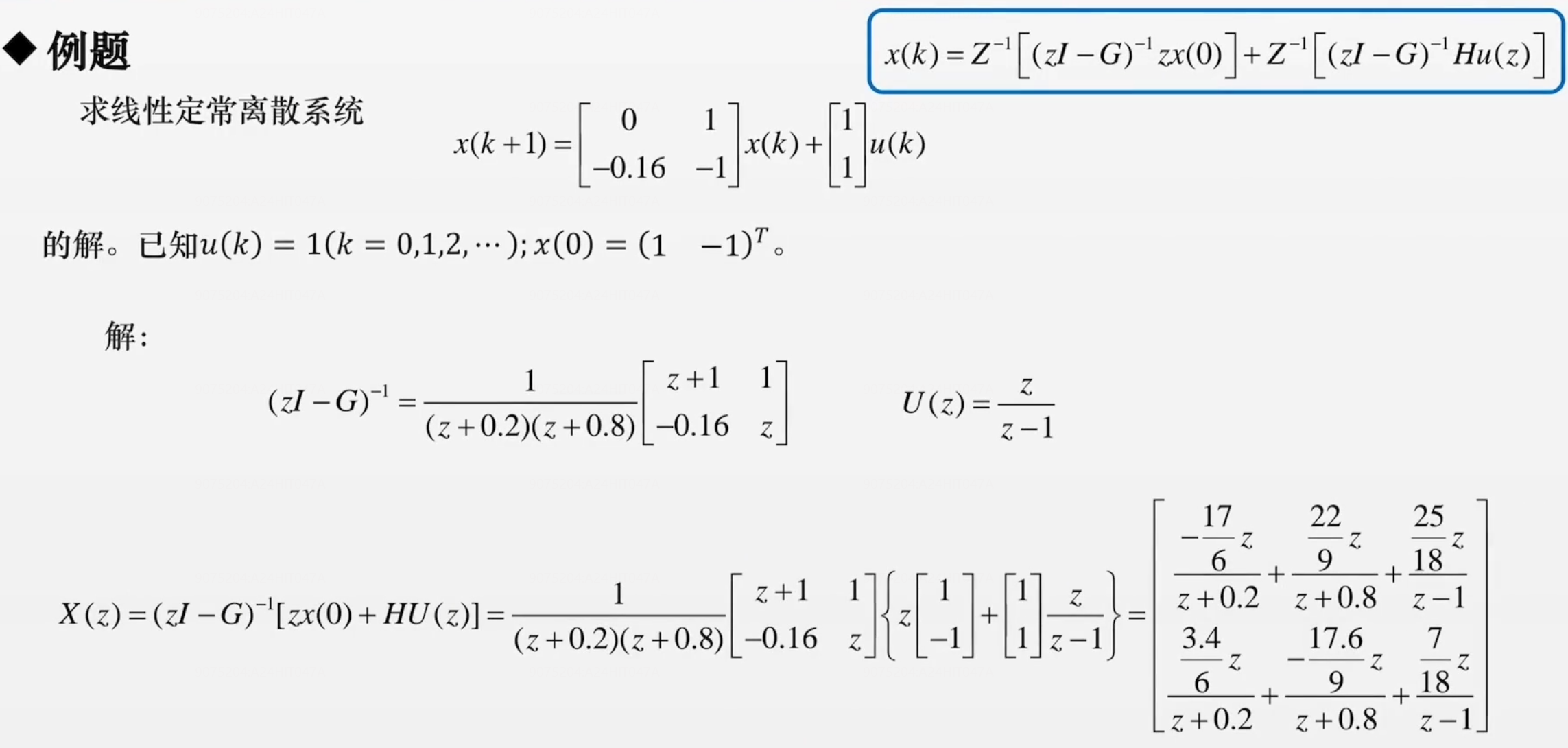
举例-x(0)已知时
Q:哈工大真题的2003-九已知x(t)求x(0)怎么做?
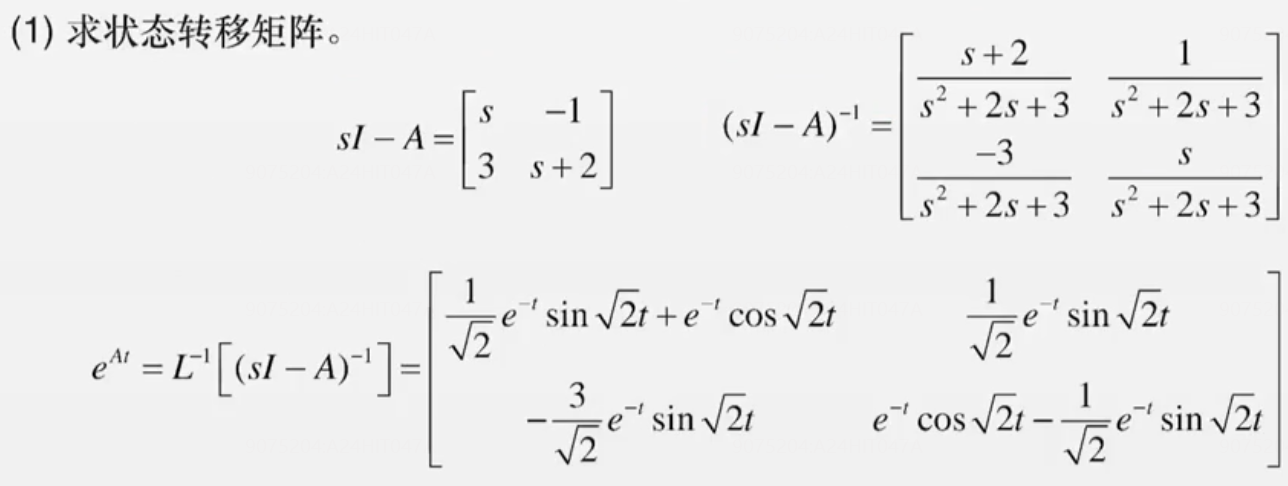
状态转移矩阵
求解状态转移矩阵的方法
拉式变换法🌟
e A t = Φ ( t ) = L ? 1 [ ( s I ? A ) ? 1 ] e^{A t}=\Phi(t)=L^{-1}\left[(s I-A)^{-1}\right] eAt=Φ(t)=L?1[(sI?A)?1]
对角矩阵
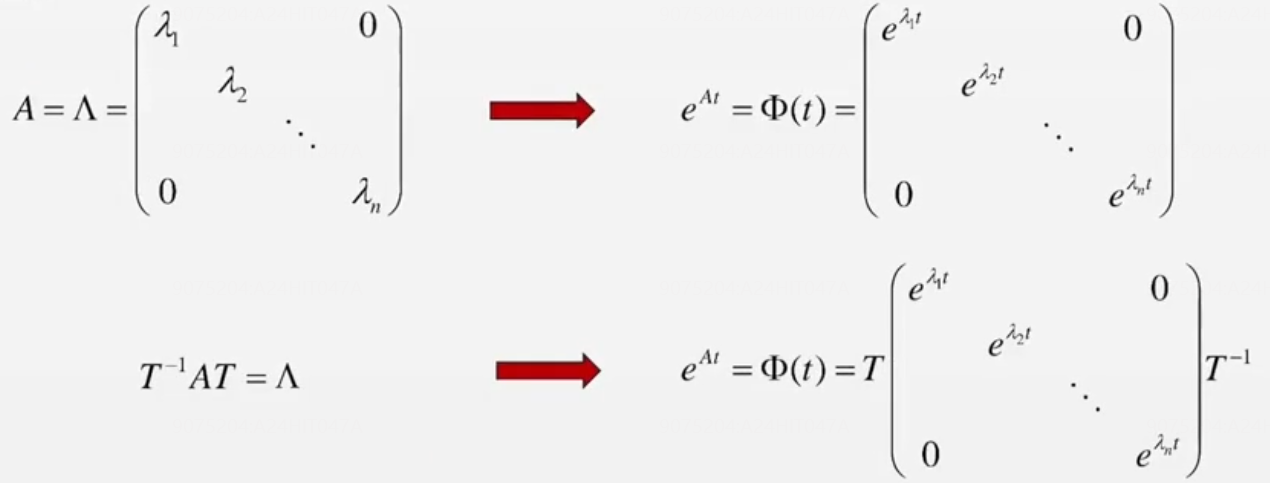
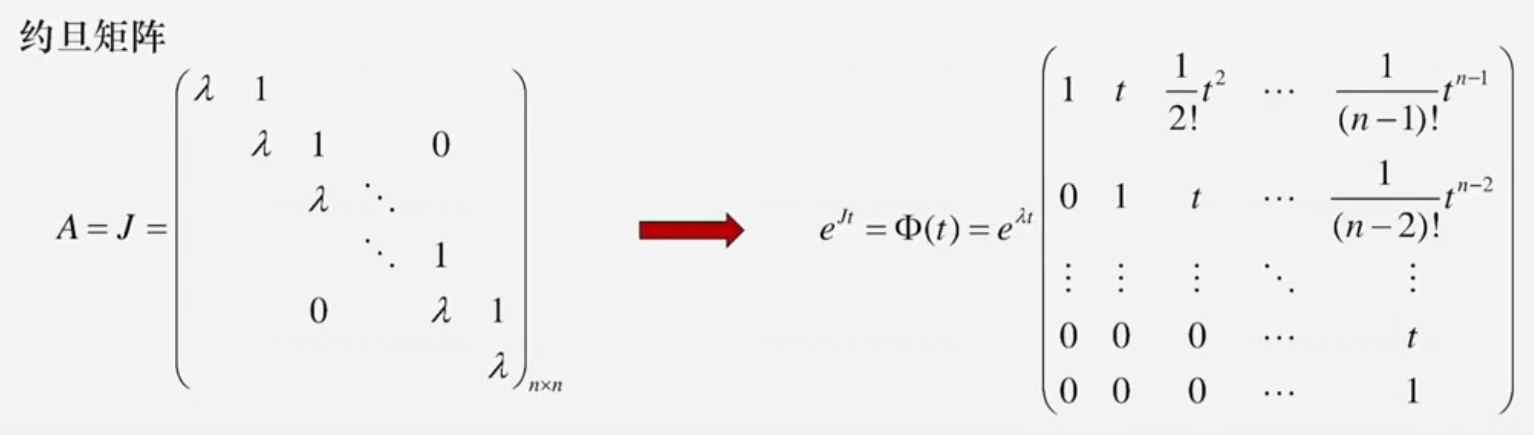
约旦阵
状态转移矩阵常用性质

Φ
(
t
1
)
?
Φ
(
t
2
)
=
Φ
(
t
1
+
t
2
)
\Phi(t_1)\cdot\Phi(t_2) = \Phi(t_1+t_2)
Φ(t1?)?Φ(t2?)=Φ(t1?+t2?)

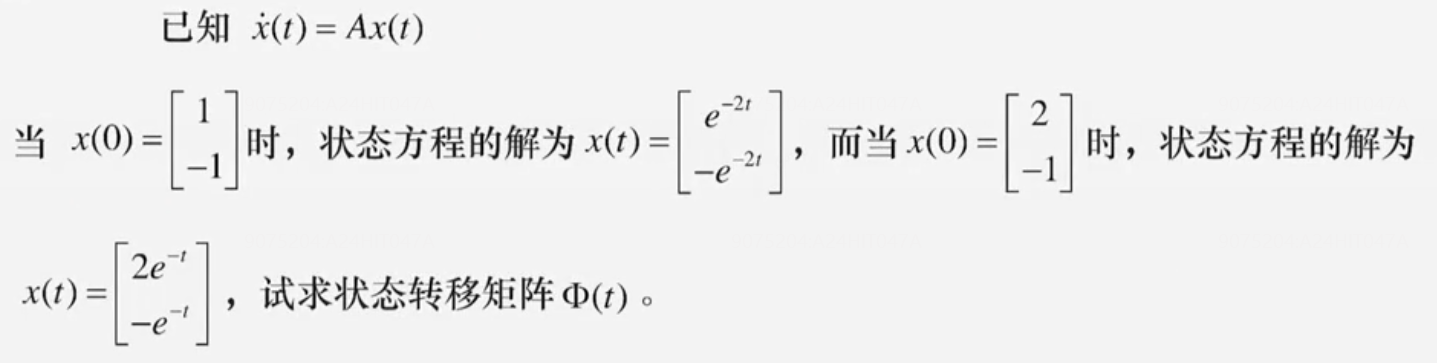
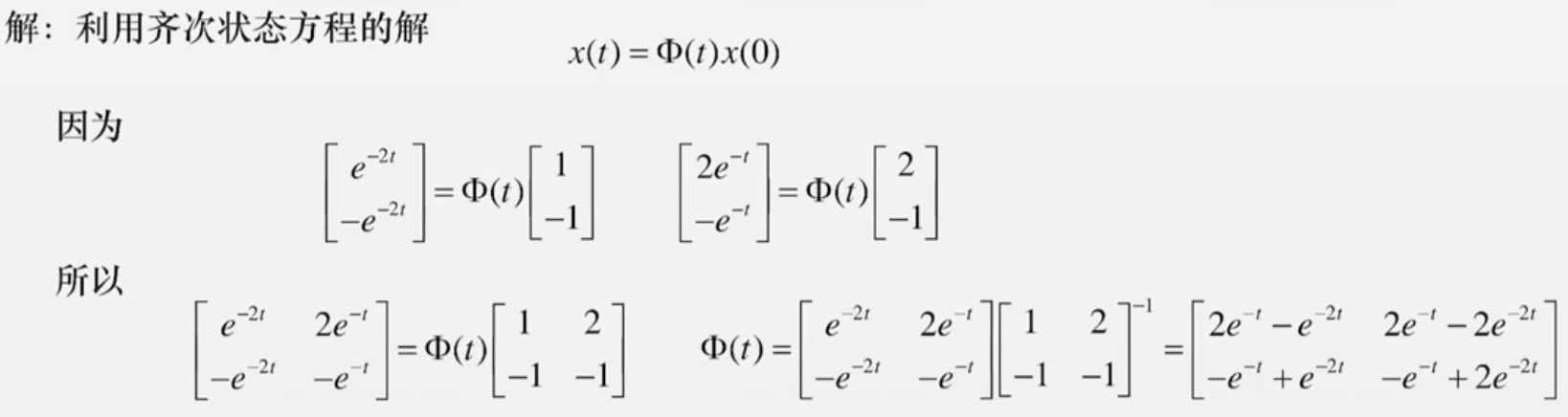
齐次方程的解🌟🌟
x
(
t
)
=
Φ
(
t
)
x
0
=
e
A
t
x
0
,
t
>
=
0
x(t)=\Phi(t)x_0=e^{At}x_0, t>=0
x(t)=Φ(t)x0?=eAtx0?,t>=0

结合拉式变换法,用反拉式变换轻松求得答案。
e A t = Φ ( t ) = L ? 1 [ ( s I ? A ) ? 1 ] e^{A t}=\Phi(t)=L^{-1}\left[(s I-A)^{-1}\right] eAt=Φ(t)=L?1[(sI?A)?1]【拉氏变换】
举例1 利用状态转移矩阵的一些性质
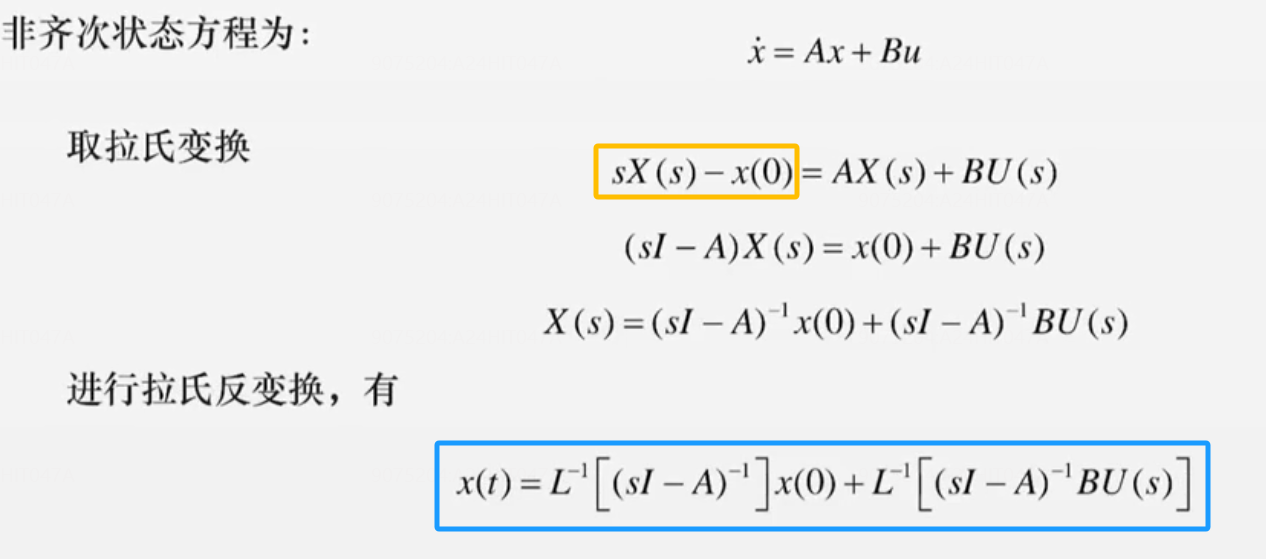
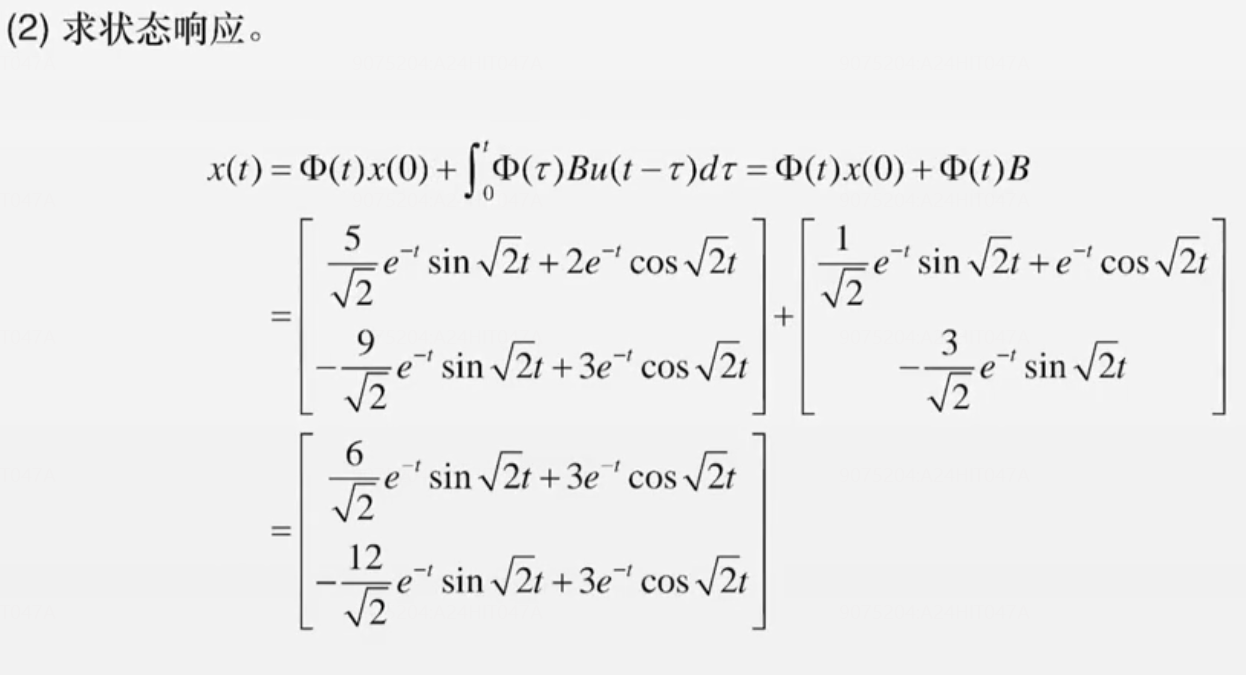
非齐次方程的解
拉式变换法【现推、不常用】
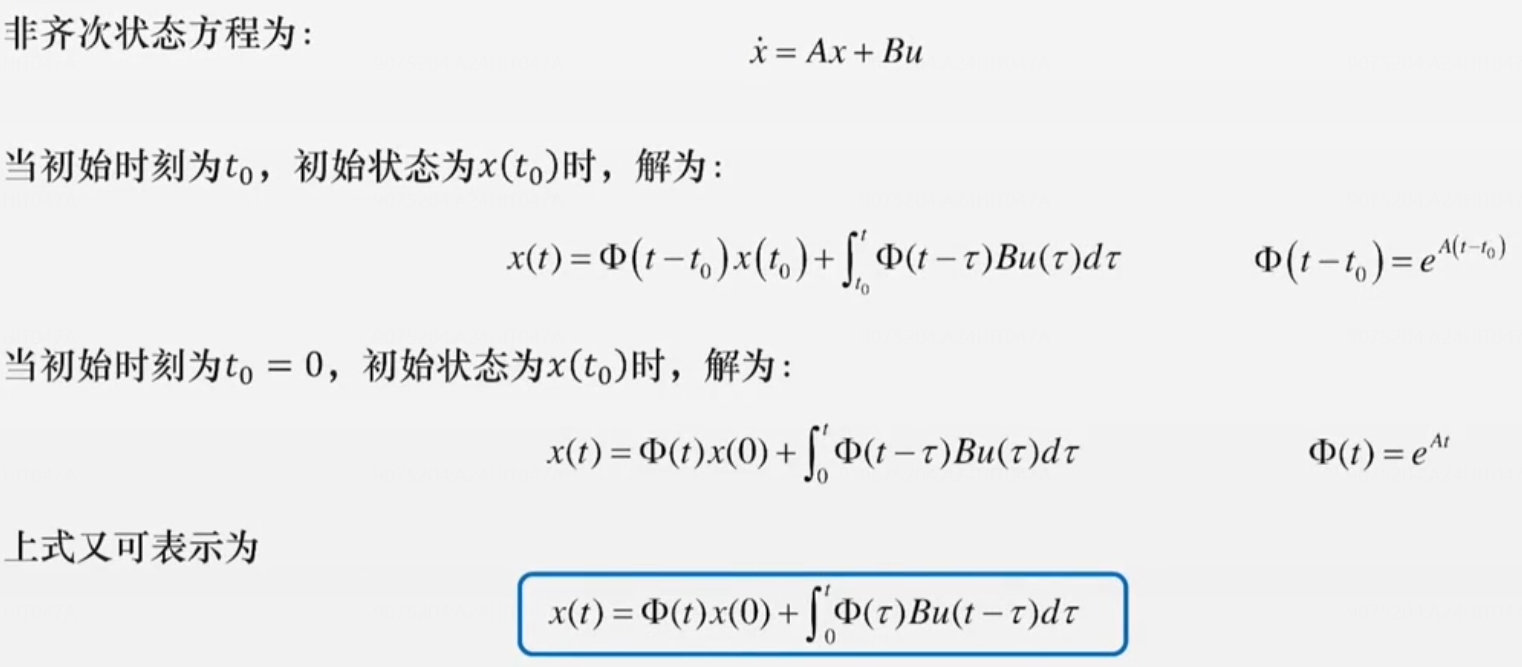
积分法【推荐掌握】🌟🌟
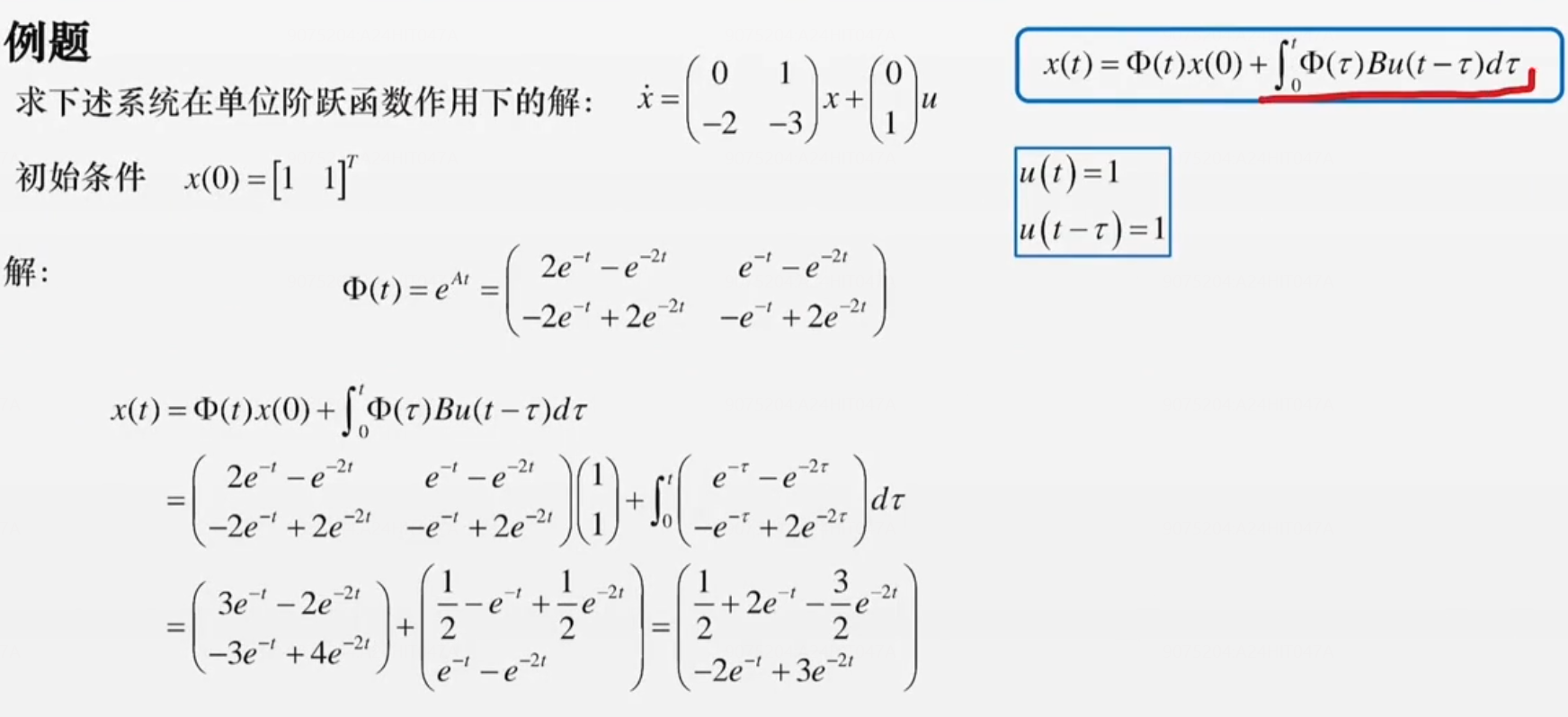
举例1 带输入矩阵解的时域表达式
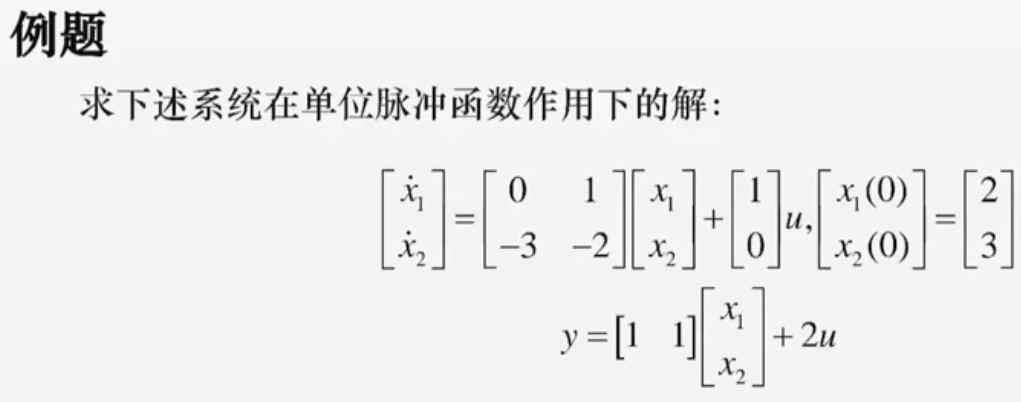
举例2 带脉冲输入的时域表达式
第一步:求状态转移矩阵,注意拉氏反变换相关知识
第二步:状态响应,【阶跃】结合【积分】极大优化运算
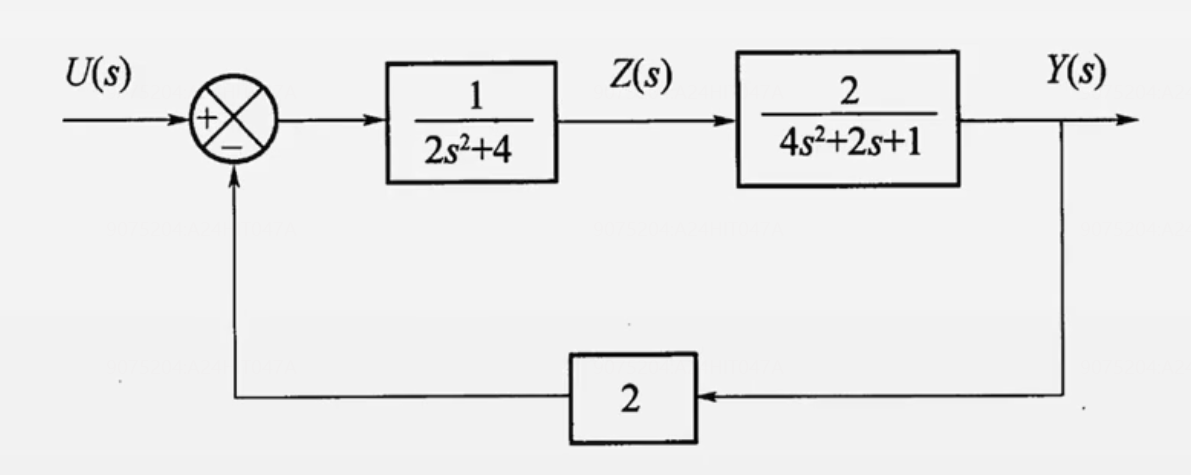
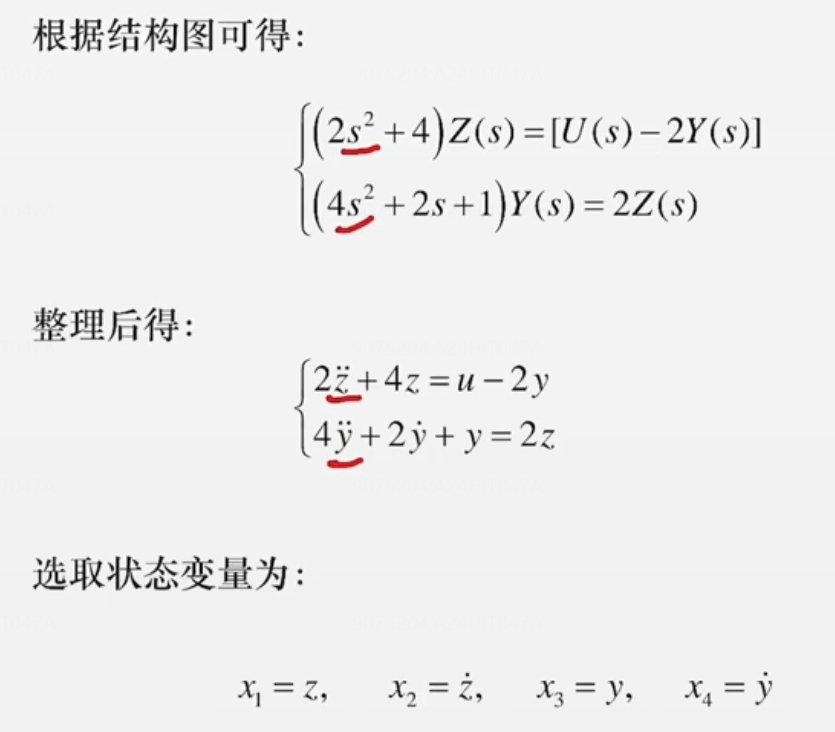
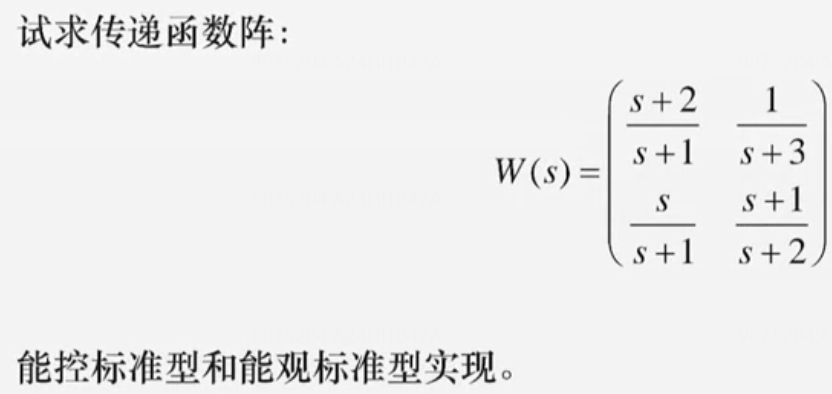
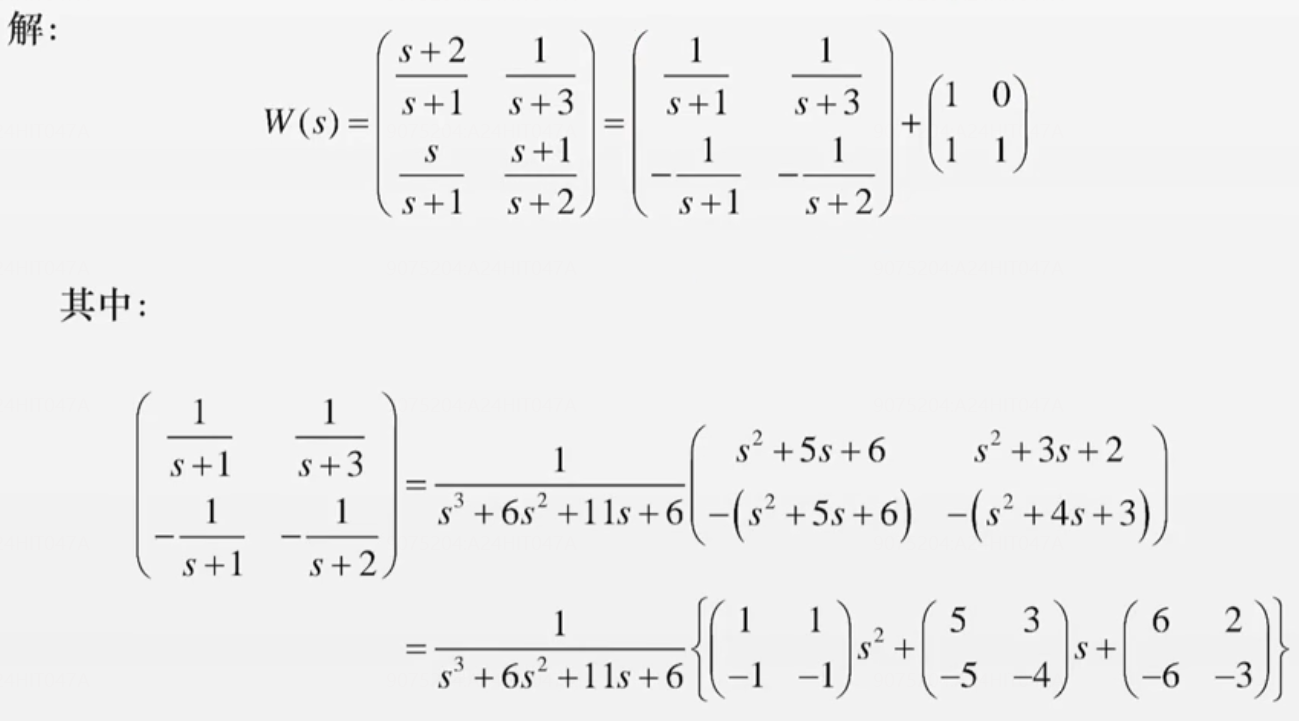
传递函数阵的实现问题
题型如下图所示:
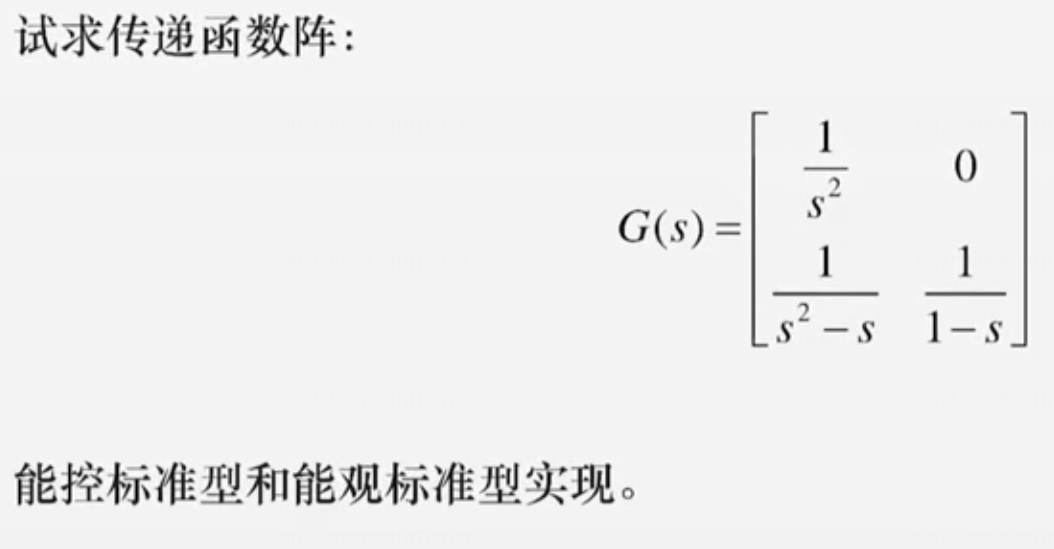
要点:判断输入输出的矩阵行列数【Tops】🌟
G m × r G_{m\times r} Gm×r?
- G阵的列数r对应u输入的列数r,G阵的行数m对应y输出的行数m,绝对不变🌟
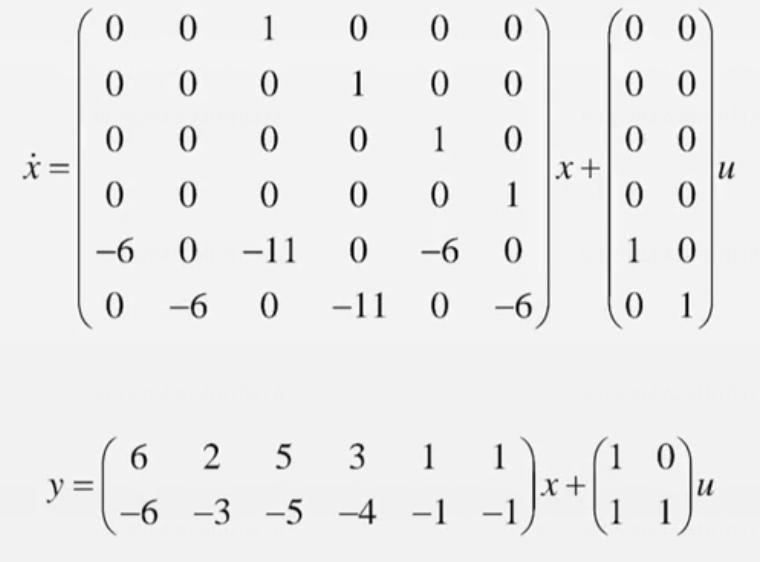
- 能控阵和能观阵实现可能有所不同:🌟
对于A阵方阵,方阵的行数=列数=- 能控-n[分母阶次]*r[传函列数];
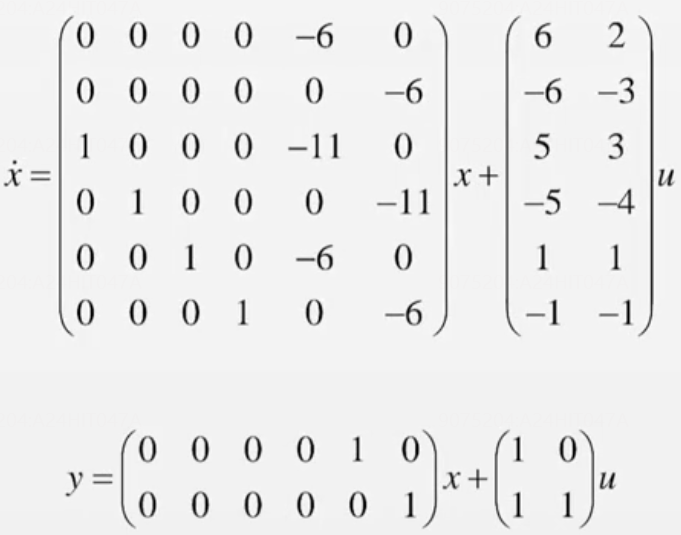
- 能观-n[分母阶次]*m[传函行数]
- 原理还是标准型实现的原理,如果维数不够,乘对应的单位矩阵
- 注意转置时,内部的每个小矩阵不转置
- 总而言之,传递函数列少时,能控更好写;行少时,能观更好写
通解
- 提取常数使传函全都是真分式【之后常数部分作为传递函数中的矩阵 D D D】
- 提取公分母,还是按照常数、 s 1 s^1 s1、 s 2 s^2 s2升阶顺序排列
举例1 提取常数化成真分式后做题
拆分
可控
可观
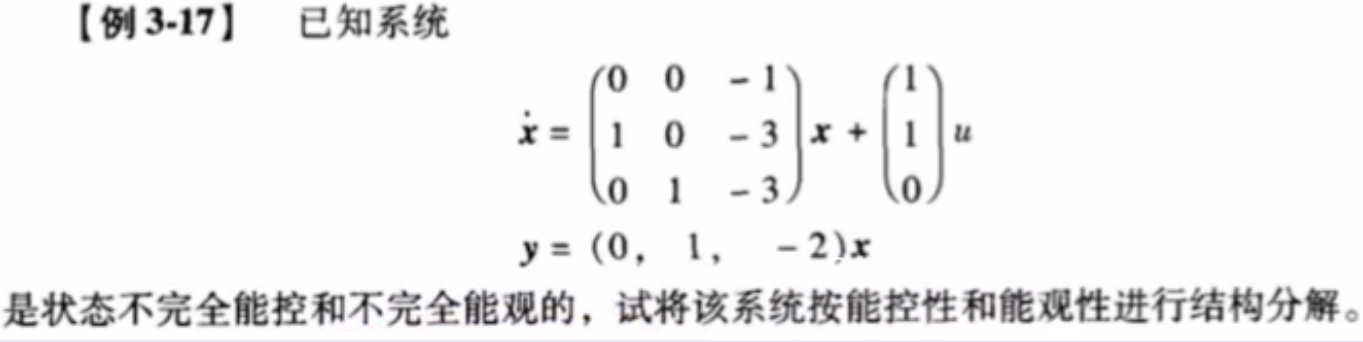
能控性与能观性
能控能观判据一览🌟🌟
Way1 单输入单输出下 零极点对消必然不是“可控可观”
Way2 能控能观性判据
可控性判断:
M
=
(
B
,
A
B
,
A
2
B
,
.
.
.
,
A
n
?
1
B
)
M=(B, AB, A^2B, ..., A^{n-1}B)
M=(B,AB,A2B,...,An?1B)
可观性判断:
N
=
(
C
,
C
A
,
C
A
2
,
.
.
.
,
C
A
n
?
1
)
T
N=(C, CA, CA^2, ..., CA^{n-1})^T
N=(C,CA,CA2,...,CAn?1)T
Way3 对角阵/约旦阵
可控,同约旦块看最后一行B,可观看第一列C
相同特征值的不同约旦块之间需要线性无关才能保证可控/可观
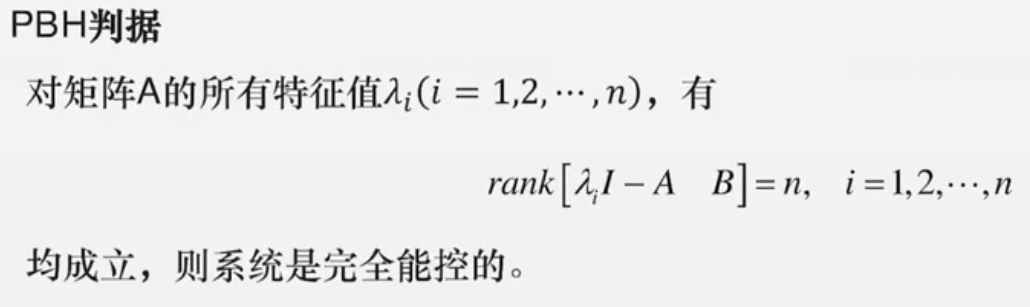
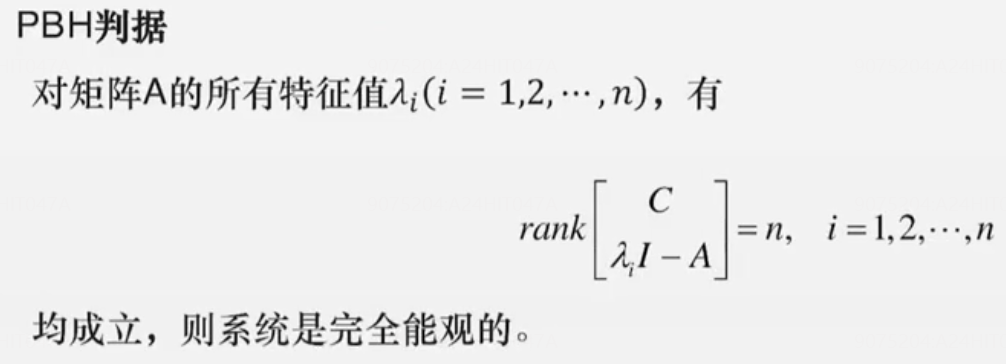
Way4 PBH判据
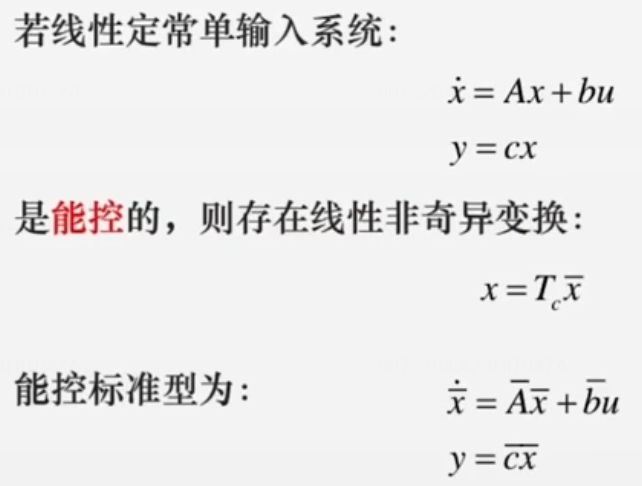
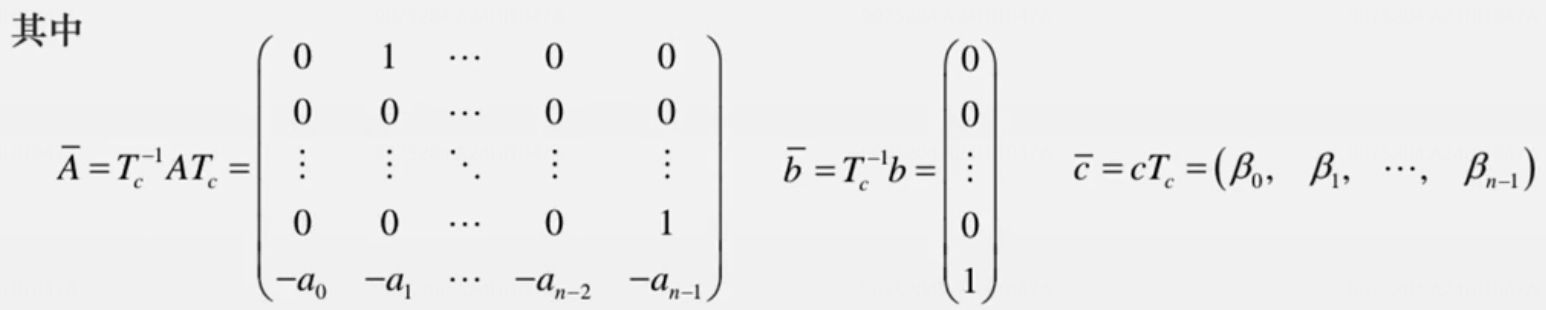
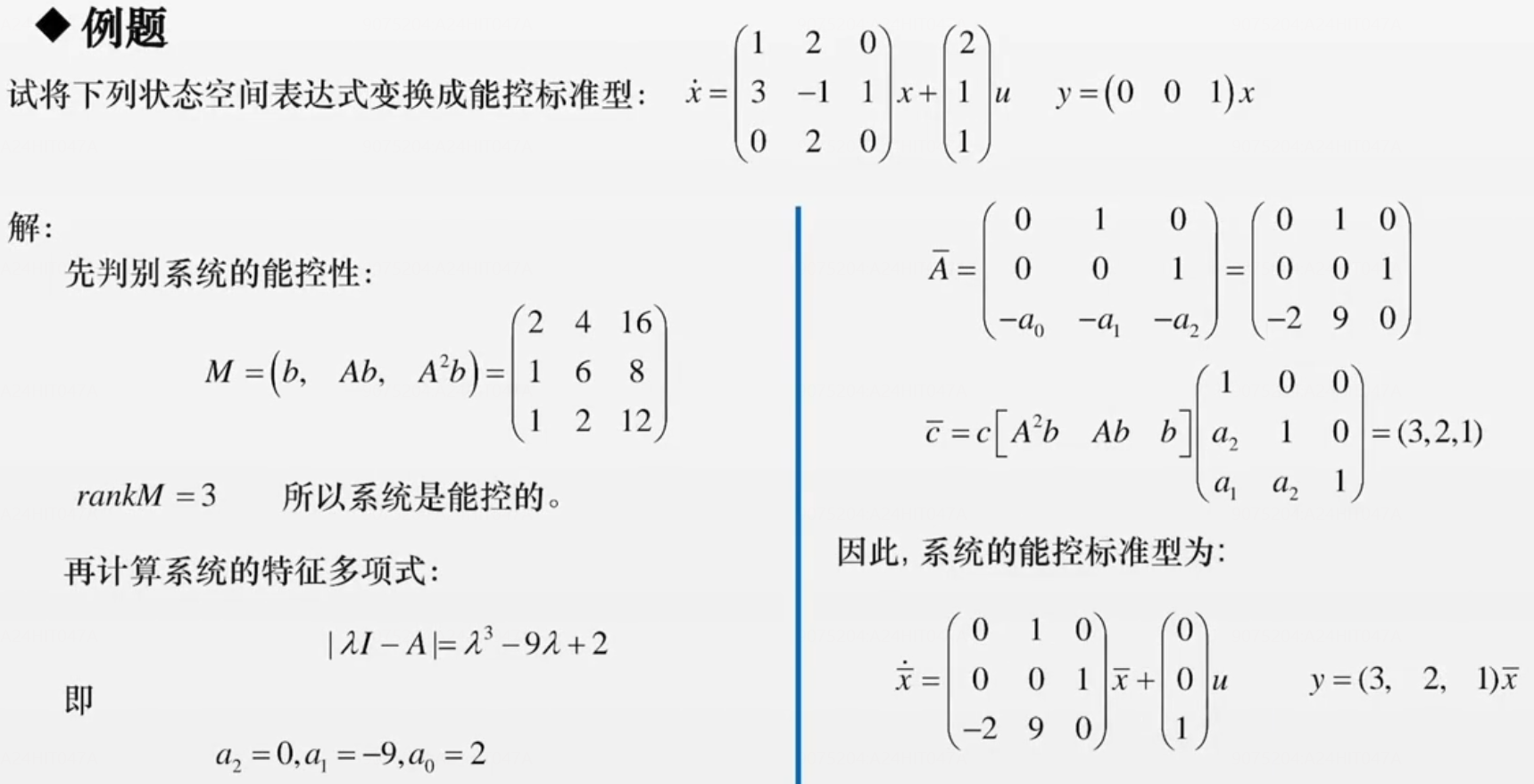
变可控标准型🌟🌟
前提条件:系统能控
做题经验:求出特征值后,A可以由特征方程的系数得到而不用求
T
c
T_c
Tc?;但是求C要费点劲(结合变换矩阵T)
 【没有
a
0
a_0
a0?项】
【没有
a
0
a_0
a0?项】
举例 求一般矩阵(可控)的能控标准型
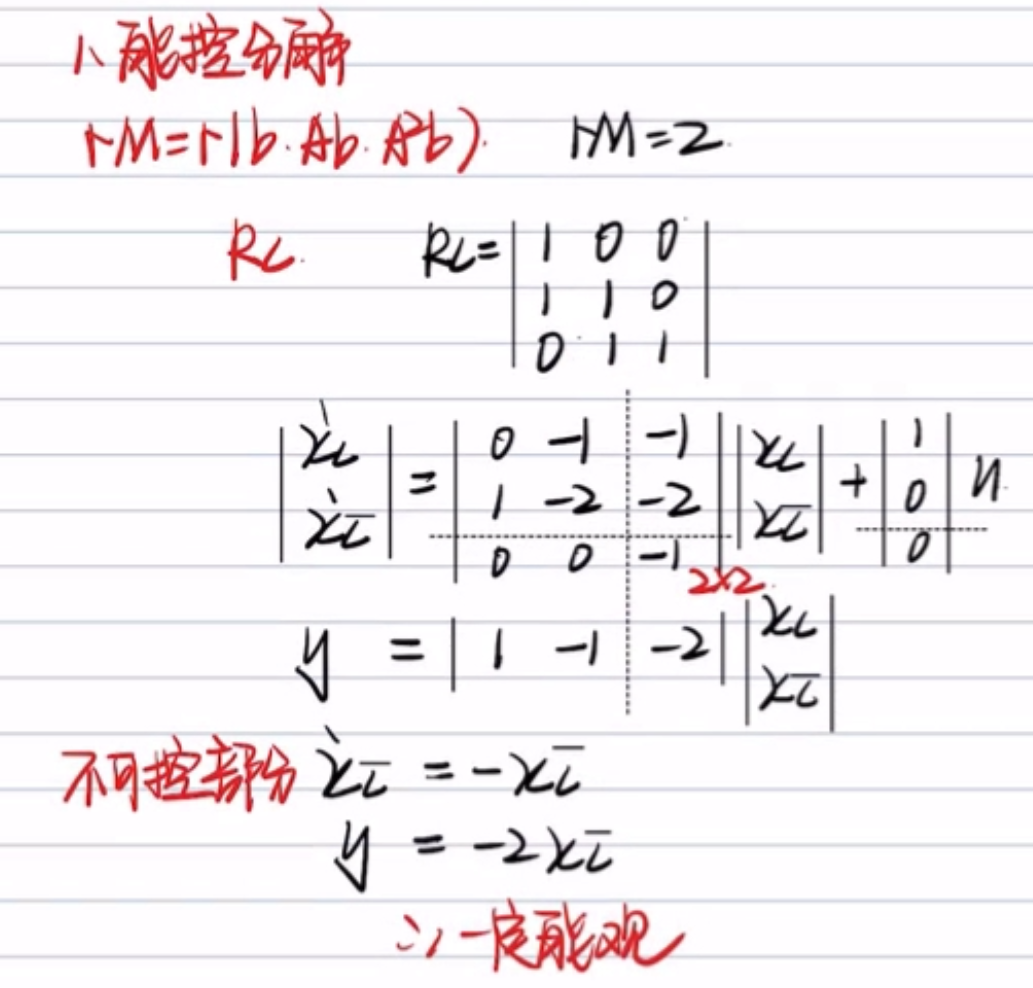
能控分解🌟🌟

其中,
R
c
R_c
Rc?的前
n
1
n_1
n1?列,是判别矩阵M中的任意线性无关的
n
1
n_1
n1?列,剩下的列任取,保证
R
c
R_c
Rc?可逆即可

这里的可控针对的是变换后的状态变量,和原来的
变可观标准型🌟🌟
前提条件:系统能观
做题经验:求出特征值后,A可以由特征方程的系数得到而不用求T;但是求B要费点劲(结合变换矩阵
T
0
?
1
T_0^{-1}
T0?1?)

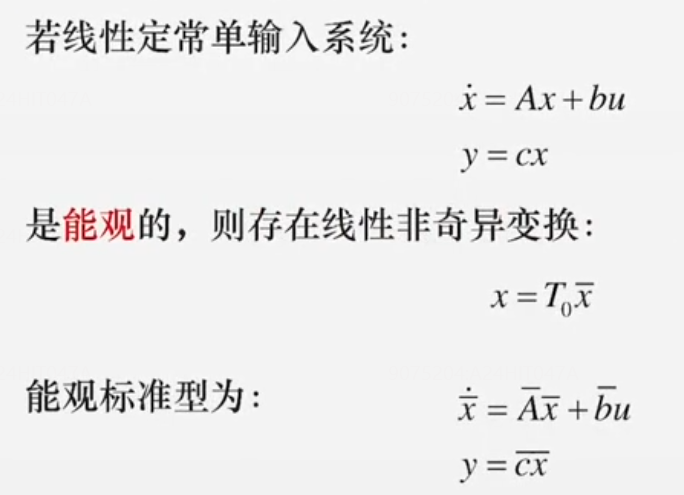
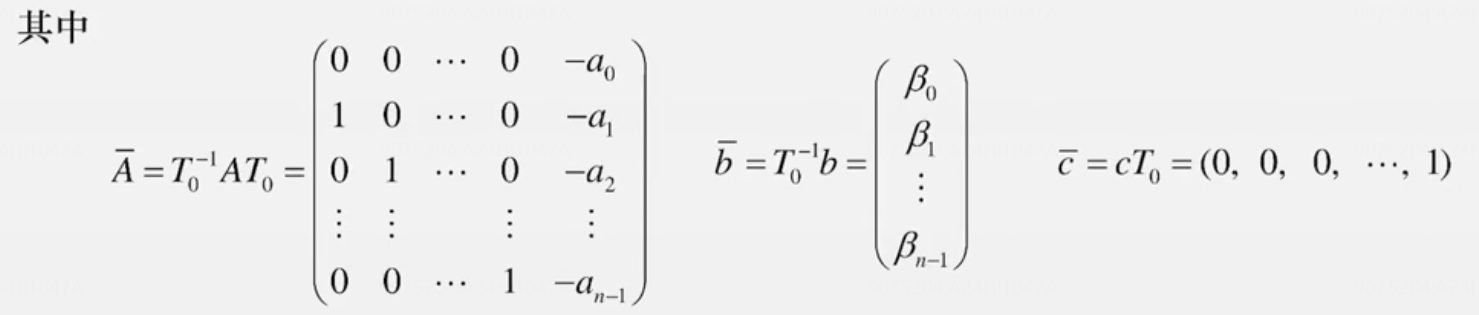
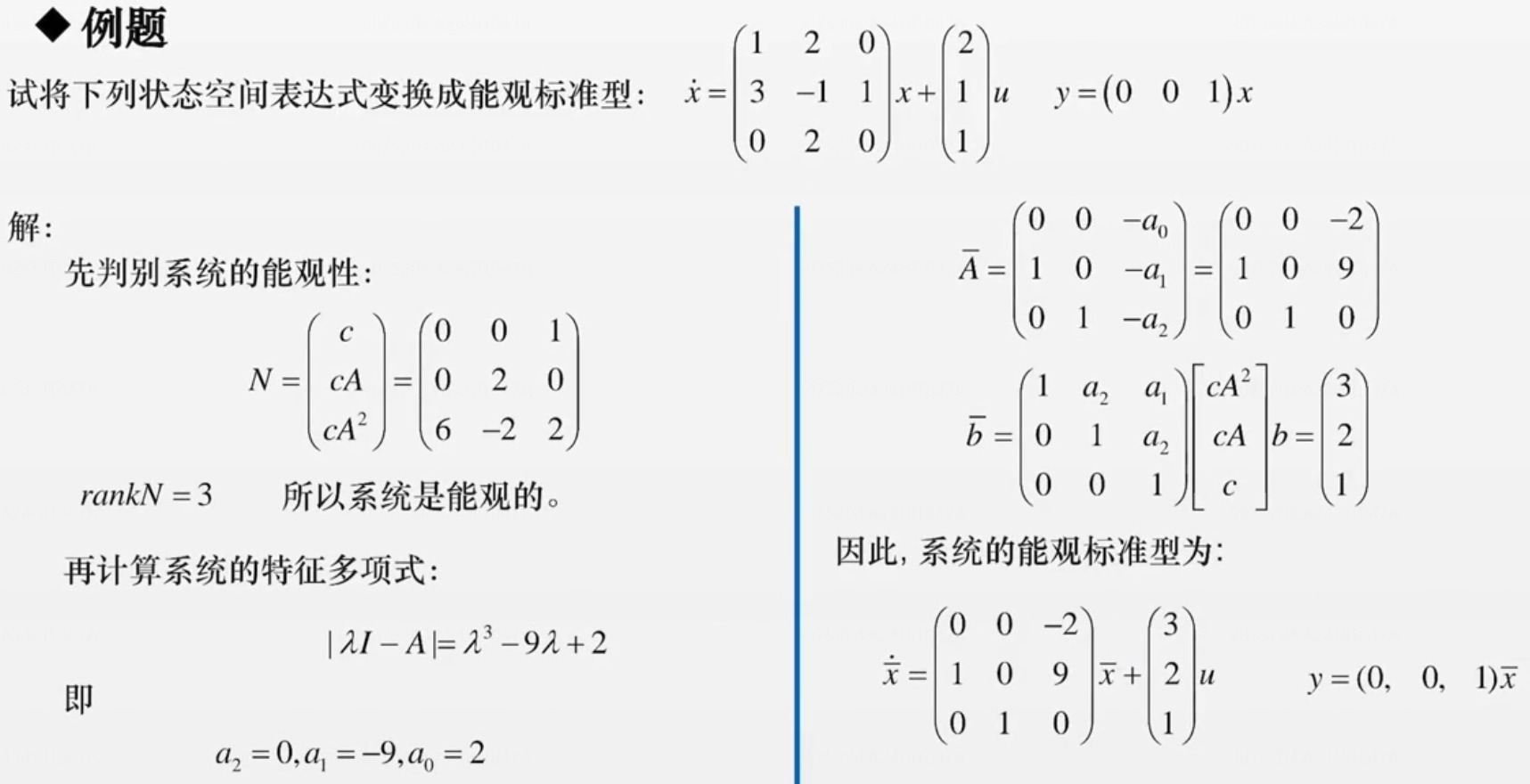
举例 求一般矩阵(可观)的能观标准型
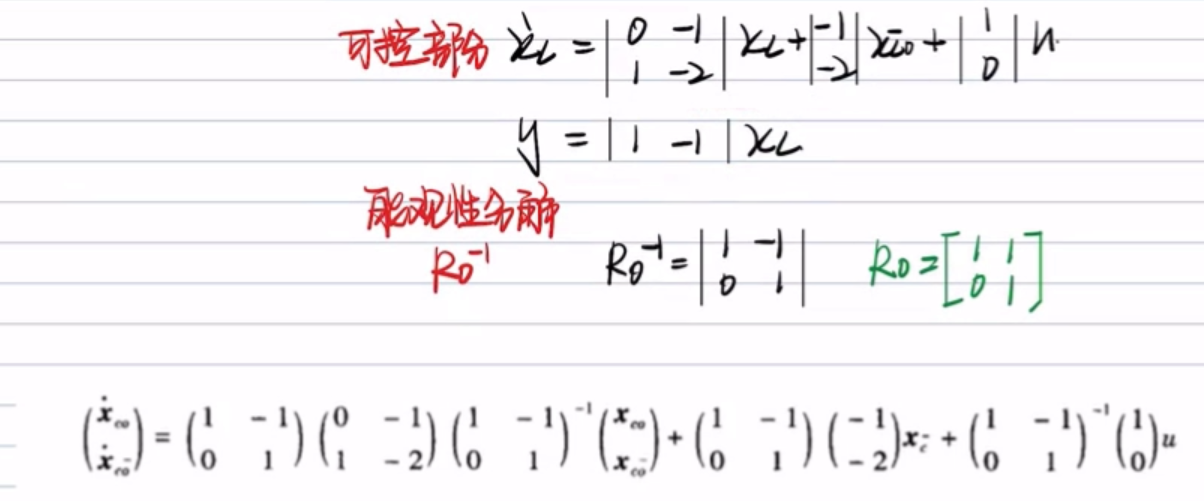
能观分解🌟🌟

其中,
R
o
?
1
R_o^{-1}
Ro?1?的前
n
1
n_1
n1?行,是判别矩阵M中的任意线性无关的
n
1
n_1
n1?行,剩下的行任取,保证
R
o
R_o
Ro?可逆即可

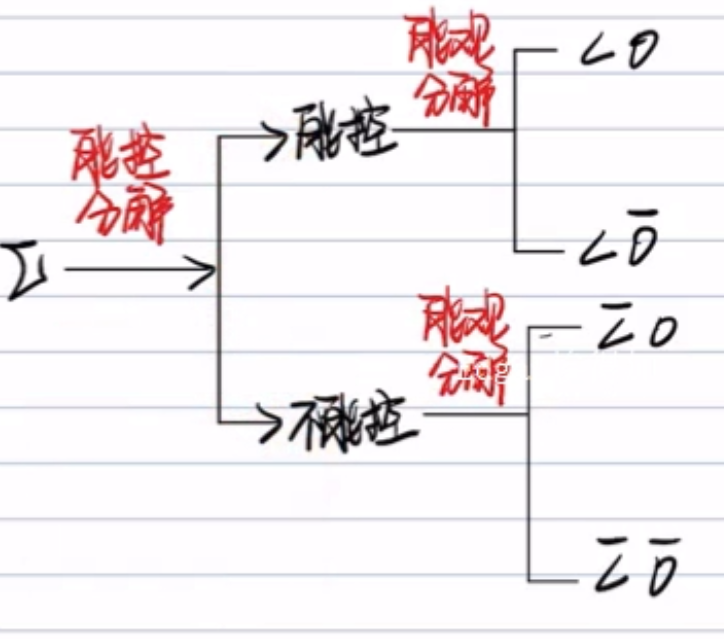
举例1 进行能控+能观分解,即最小实现问题【较难,注意第二步线性变换的方式】
- 思路
相当于对系统进行能控性(能观性)分解后,再分别对两个部分进行能观性(能控性)分解
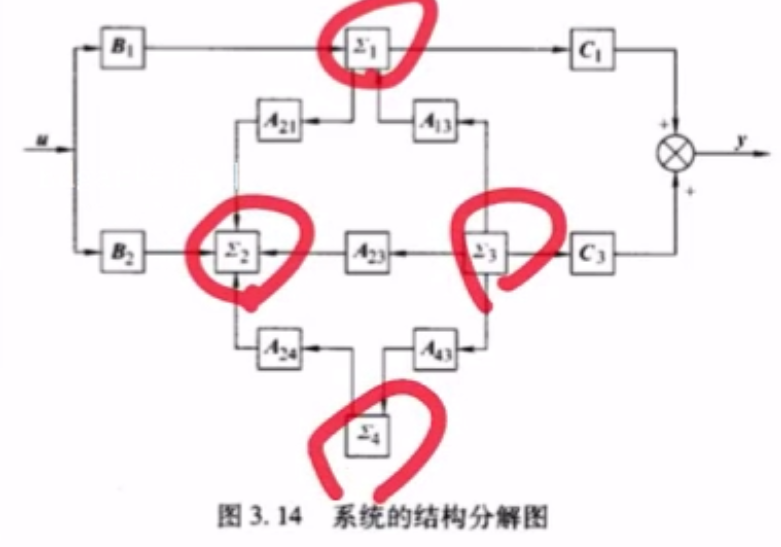
例题
- 能控性分解
- 对能控部分进行能观性分解
补充说明:如果能观性分解后,能控不能观的部分是一维的,即一个数【如本题】,那就看做“输入u”,直接左乘变换矩阵 R ? 1 R^{-1} R?1,不需要右乘R
【上面截图最后一行出错了】
Q 如果传递函数有零极点对消,那么一定不是最小实现
线性变换
基础知识🌟
线性变换的公式
要求:变换矩阵T非奇异
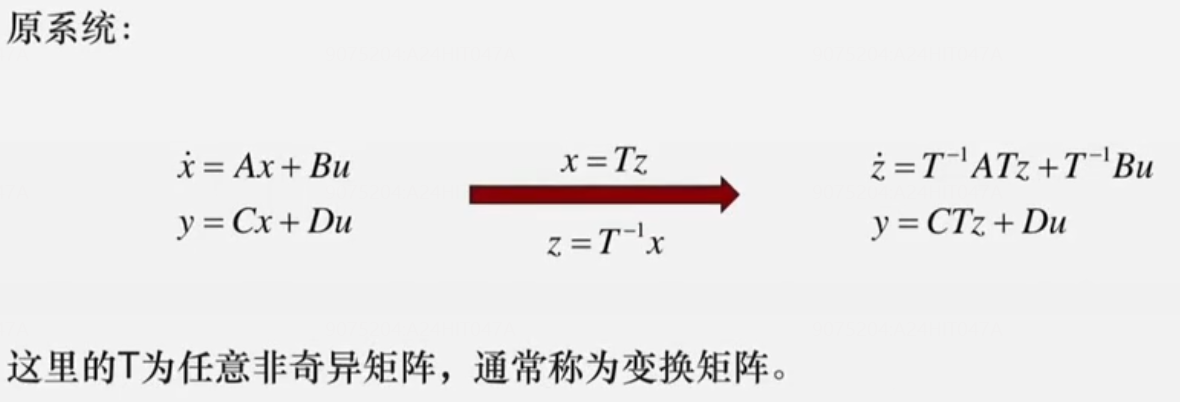
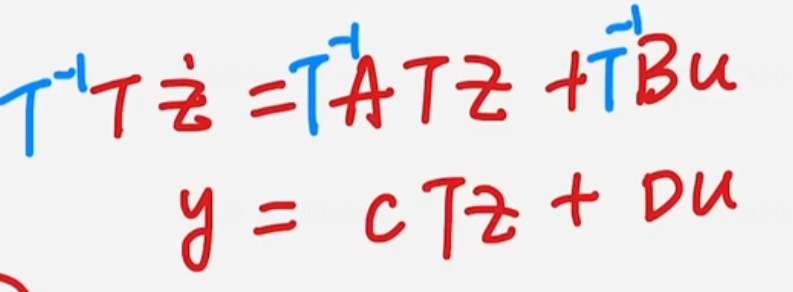
推导过程
线性变换性质
传递函数不变、特征值不变、系统【注意,是系统不是矩阵A】的可控可观性不变
变为对角阵(A可进行相似对角化)
对应:特征值无重根的情况
方法:找特征向量进行相似对角化
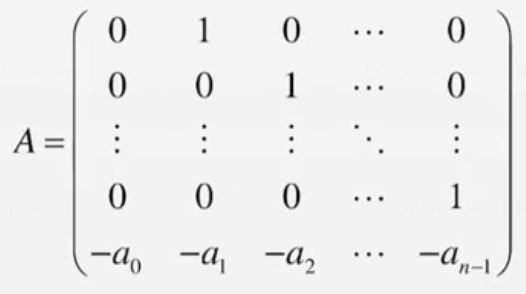
相似对角化中一个特例:A阵为友矩阵(仍要满足特征值无重根)
矩阵
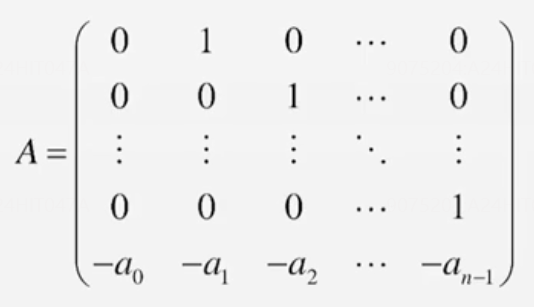
对应变换公式
变为约旦阵(特征值有重根且A不可进行相似对角化)🌟
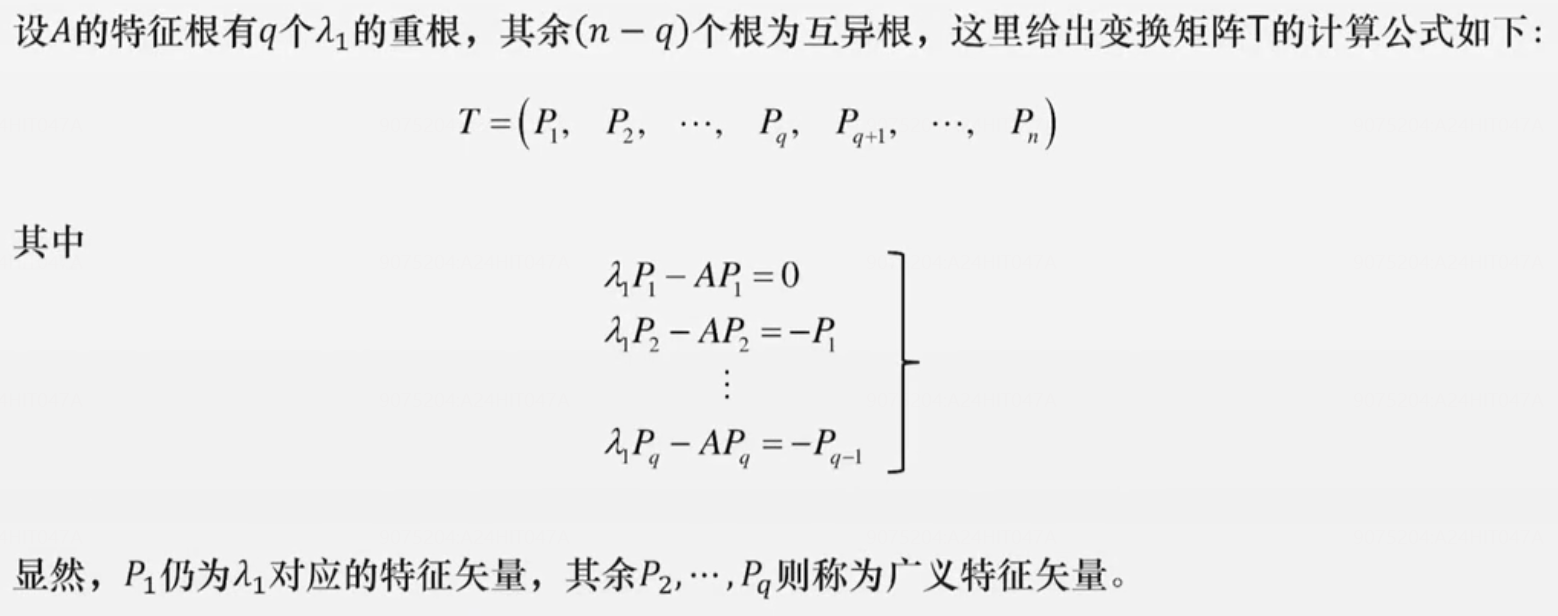
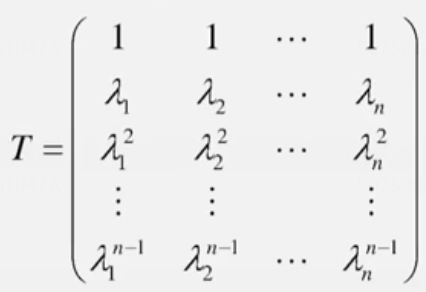
同样的特例:友矩阵

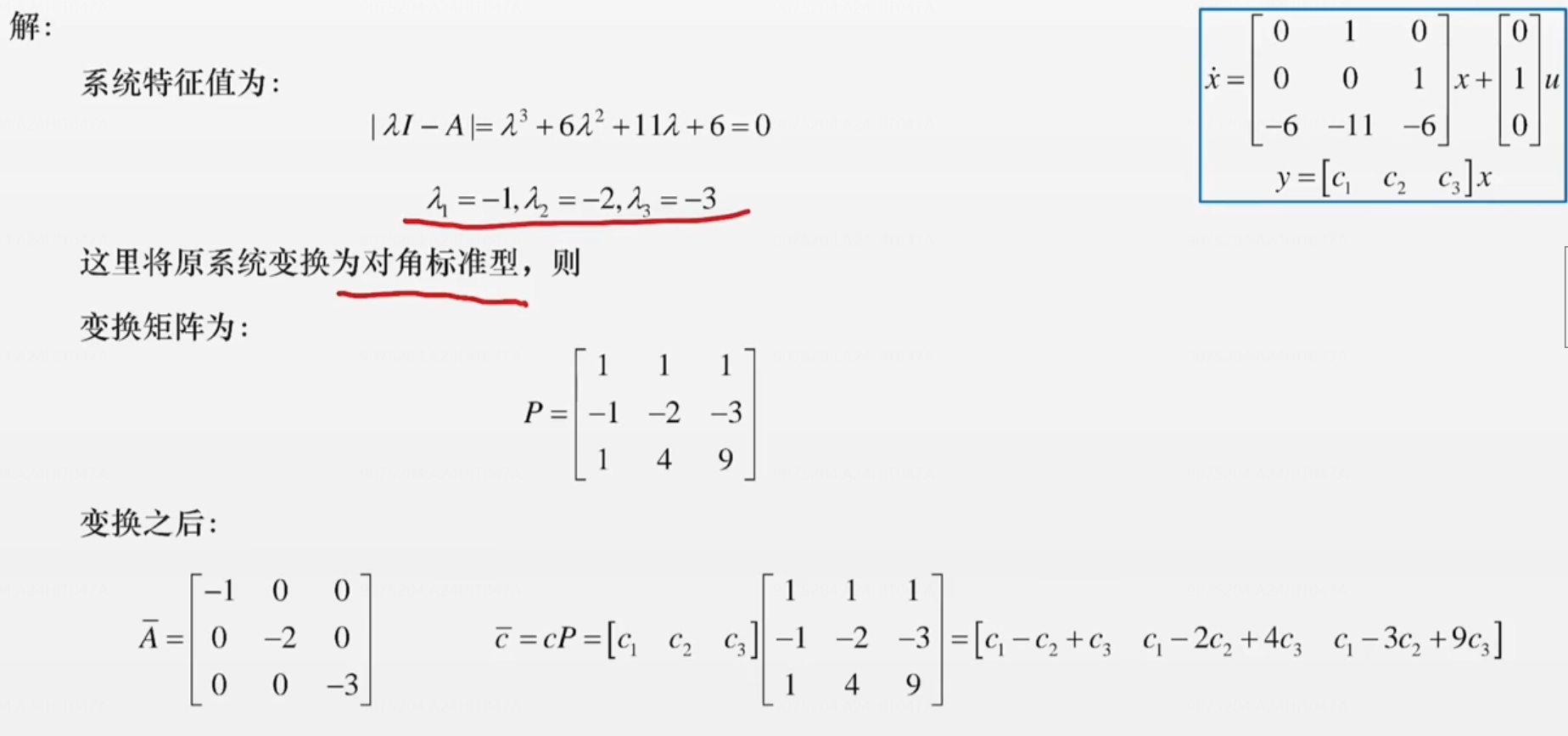
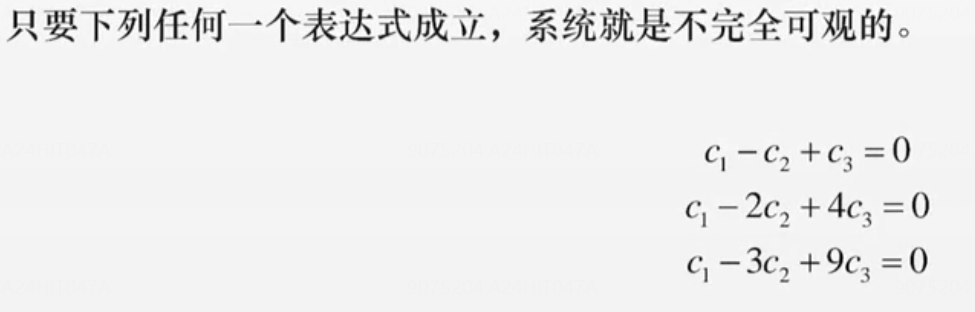
举例1 线性变换后求可观性?

经判断,A是友矩阵,线性变换为范德蒙德行列式
线性定常系统反馈问题
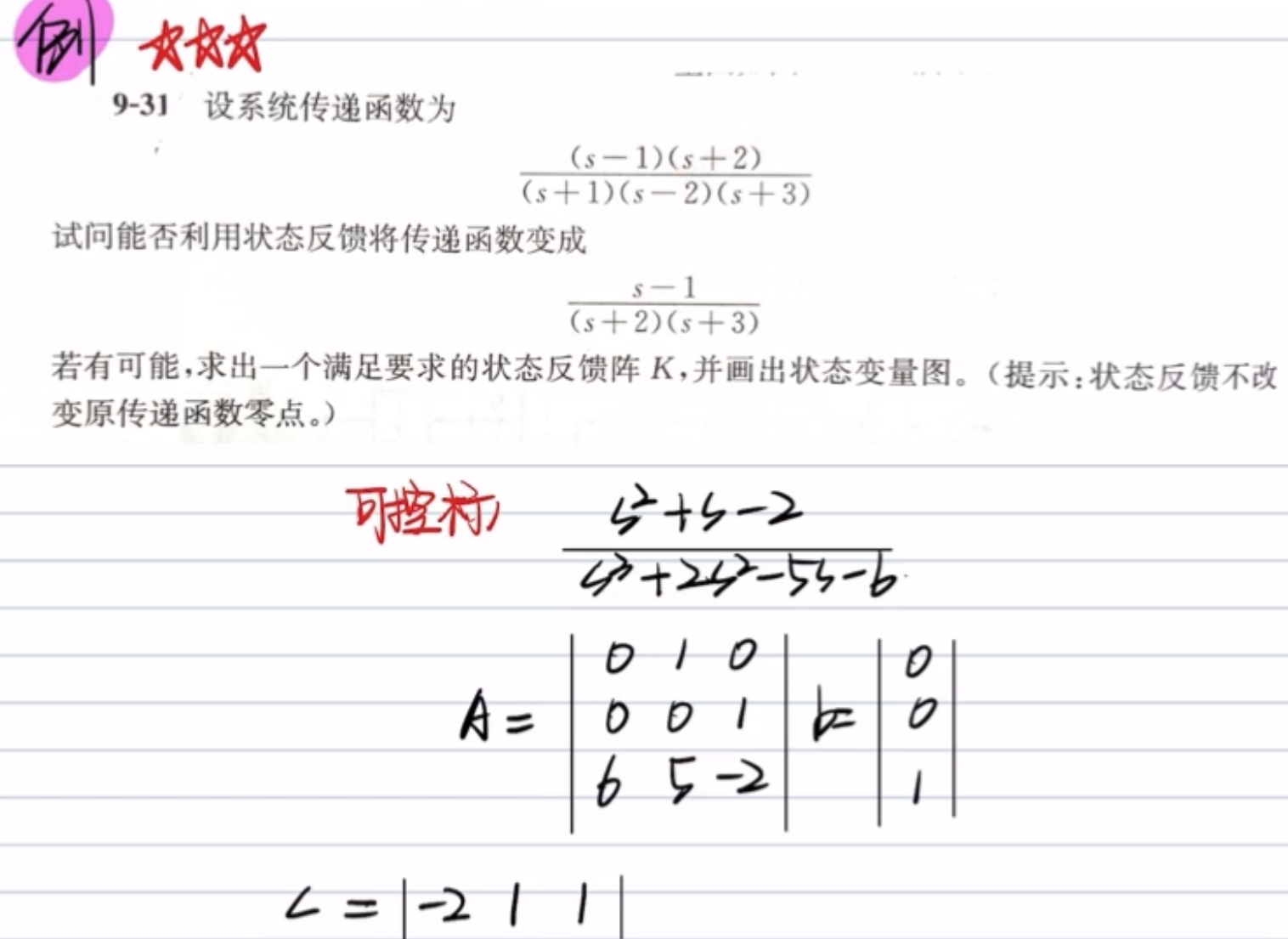
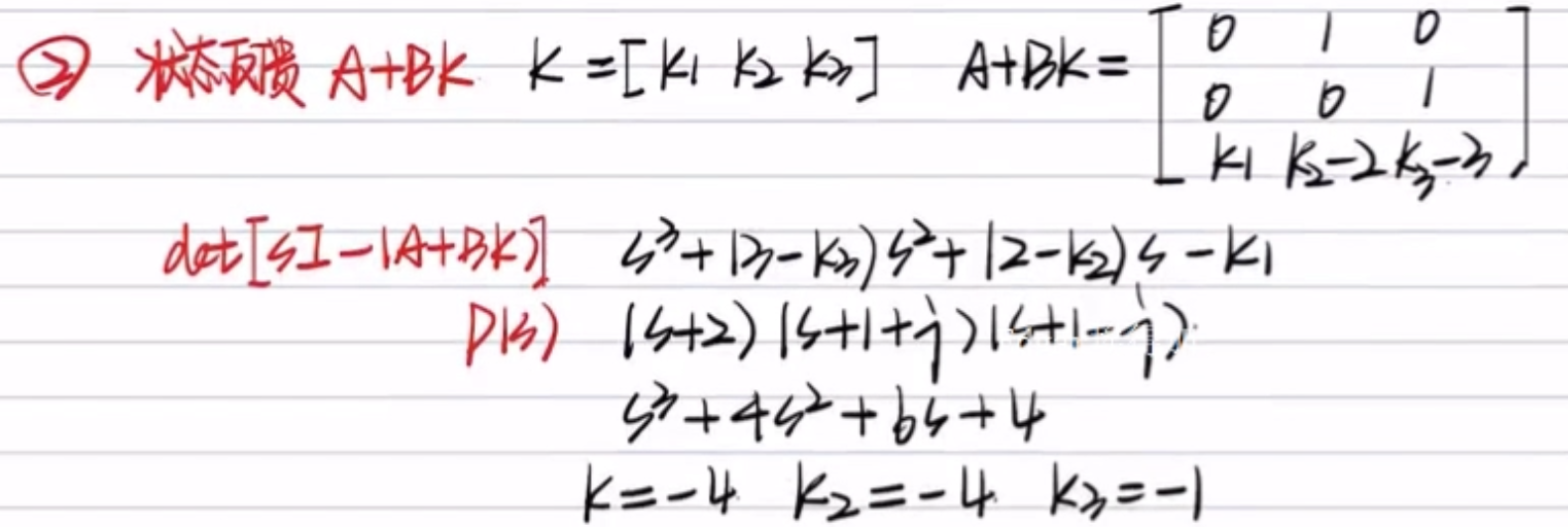
状态反馈【题目多,灵活】
结构图【反馈到输入后,B前】
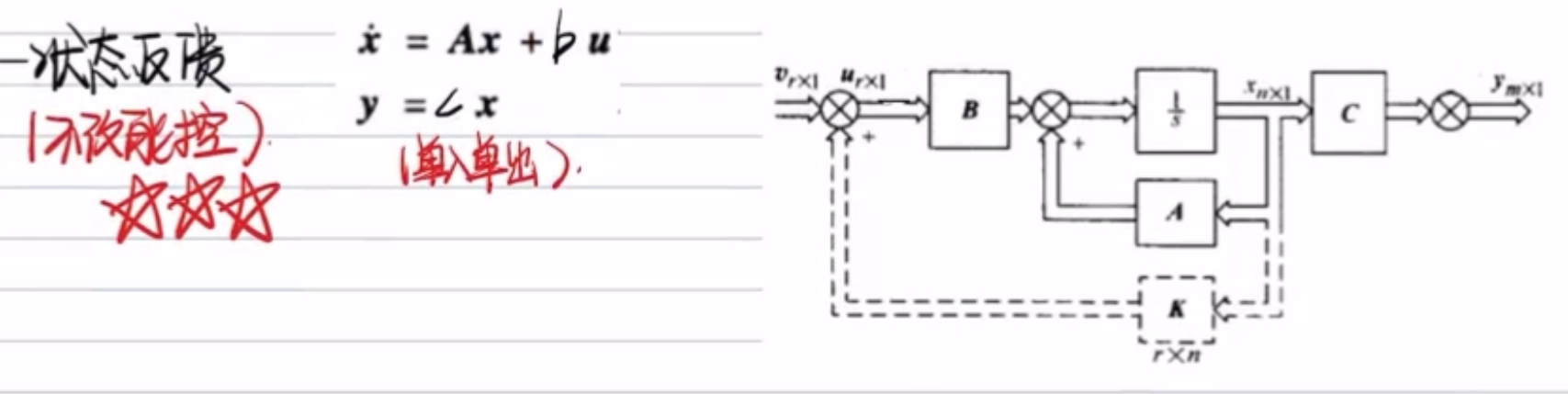
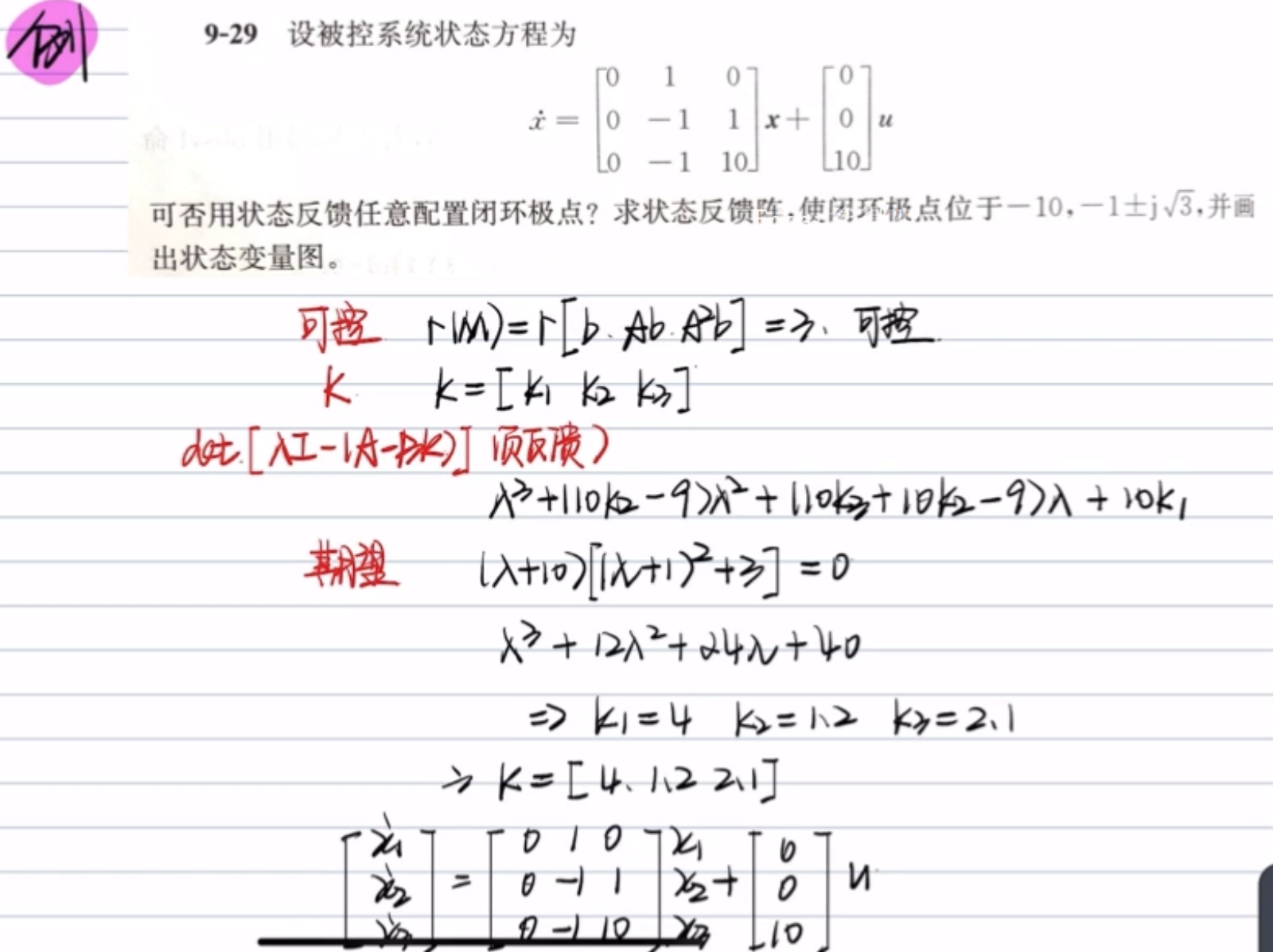
求解方法【官方,规范,必须遵守】?
- 判断系统是否满足能控性
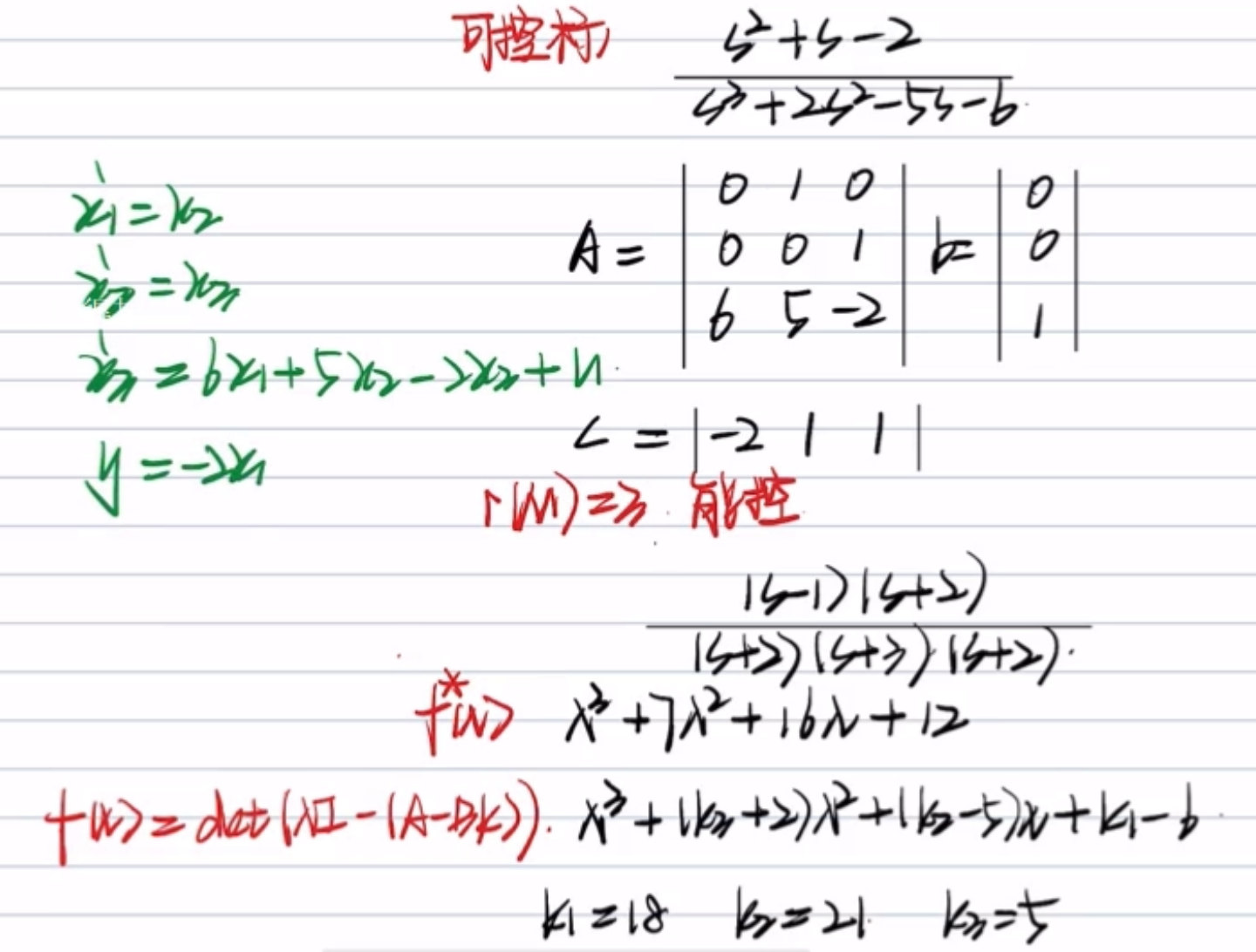
- 列写反馈后的系统多项式【A+bK:正反馈 或者 A-bK:负反馈】其中K是1xm维未知向量
- 比较期望特征多项式和带参数的特征多项式的各项系数
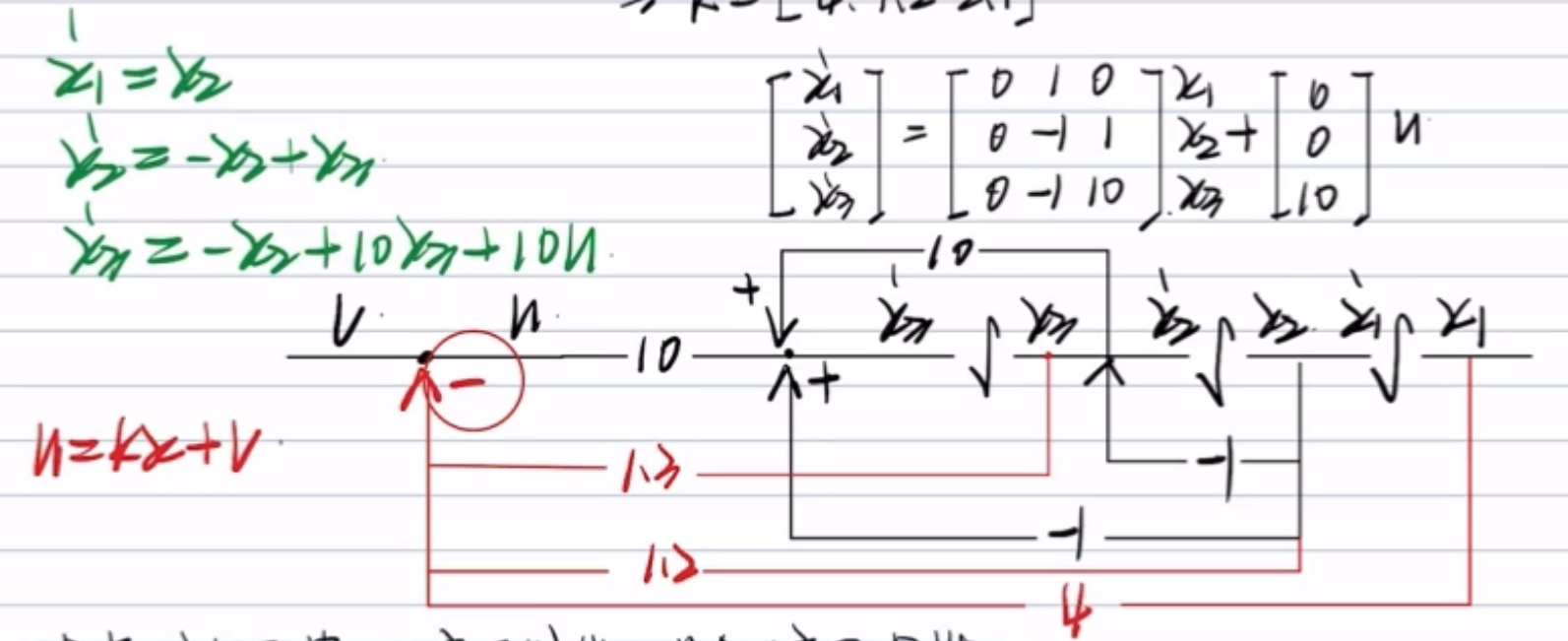
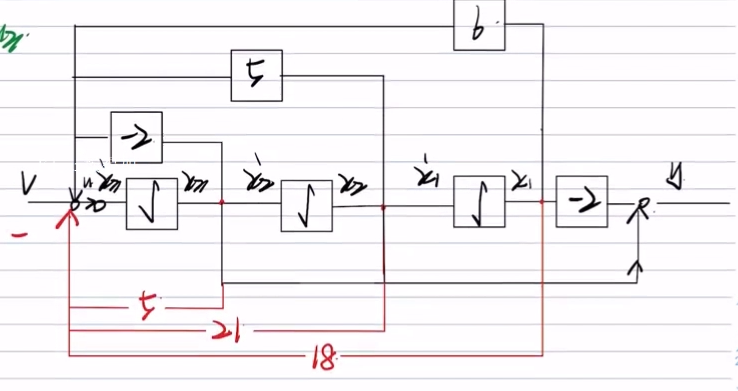
绘图示例

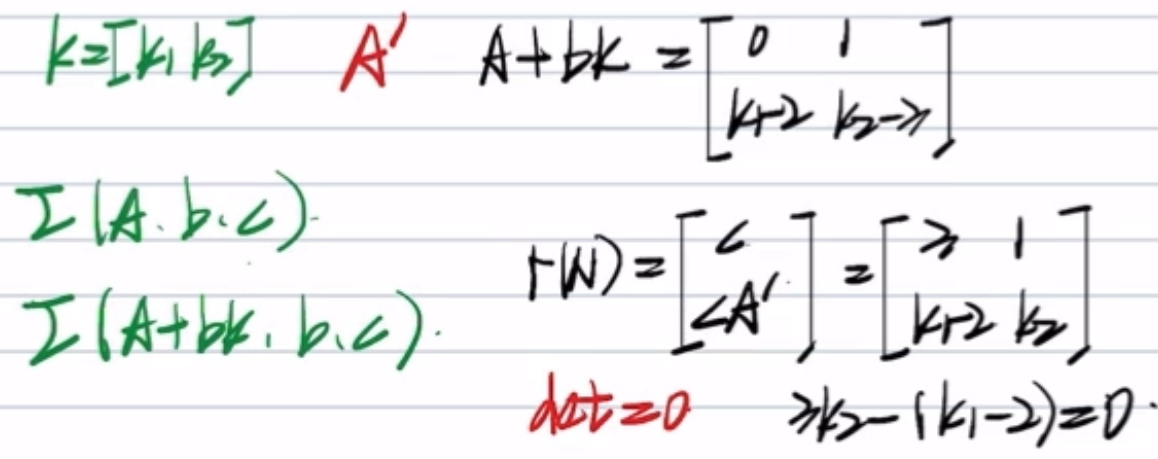
技巧方法🌟【??本方法只适用于A为能控标准型情况】【状态观测器中该技巧对偶存在】
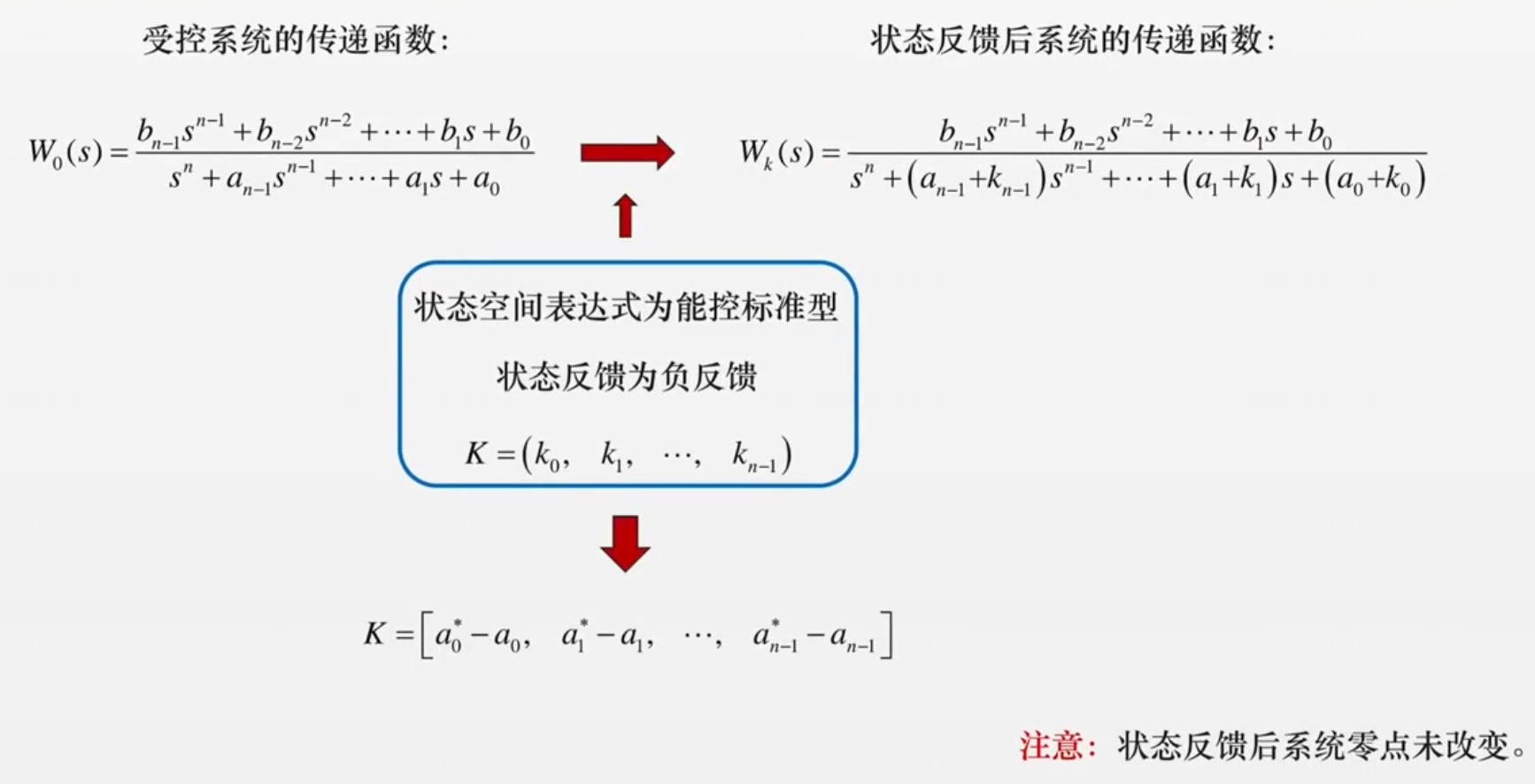
注意,k的下标和s前的系数是一致的,状态反馈后系统零点未改变

在此方法下…
在此方法下,分母就是特征多项式,分子不变,因为状态反馈不改变系统零点
举例1 状态反馈+结构图
举例2 状态反馈+反馈后可观性

举例3 状态反馈+结构图&零极点对消
输出反馈*【考察的不多】
结构图【往往用下面的,反馈到状态变量导数前,B后】

求解方法【官方,规范,必须遵守】?
- 判断系统是否满足能观性
- 列写反馈后的系统多项式【A+Gc:正反馈 或者 A-Gc:负反馈】其中G是rx1维未知向量
- 比较期望特征多项式和带参数的特征多项式的各项系数
系统镇定【套路固定】
求解方法
进行能控分解后,系统镇定的充要条件是不可控部分特征值为负,因此基本套路如下:
- 能控分解,判断不能控部分特征方程是否均具有负实部
- 能控部分进行极点配置【随便配置,能控部分满足条件即可,不能控部分系数任意】
- ??将能控部分的状态反馈系数K‘转为原系统的状态反馈系数K(右乘
T
c
?
1
T_c^{-1}
Tc?1?)
转换方法如下

类似地,输出反馈的话是左乘 ( T o ? 1 ) ? 1 (T_o^{-1})^{-1} (To?1?)?1【都是对:能直接得到的矩阵 求逆,一个是左乘,一个是右乘】
求解方法② 利用PBH判据*非主流
参考上面的可控性判断,主流方法是判断不可控的部分是否稳定,这个是判断不稳定的部分是否可控
举例1 系统镇定+能控分解后的状态反馈向原状态反馈的转变🌟🌟?

-
能控分解

-
状态反馈配置可控部分

-
将能控分解矩阵对应的反馈系数 K K K转为线性变换前反馈系数 K 0 K_0 K0?
解耦*【从未考察】
求解方法
纯粹就是套模板
- 判断每一个输入对应的di
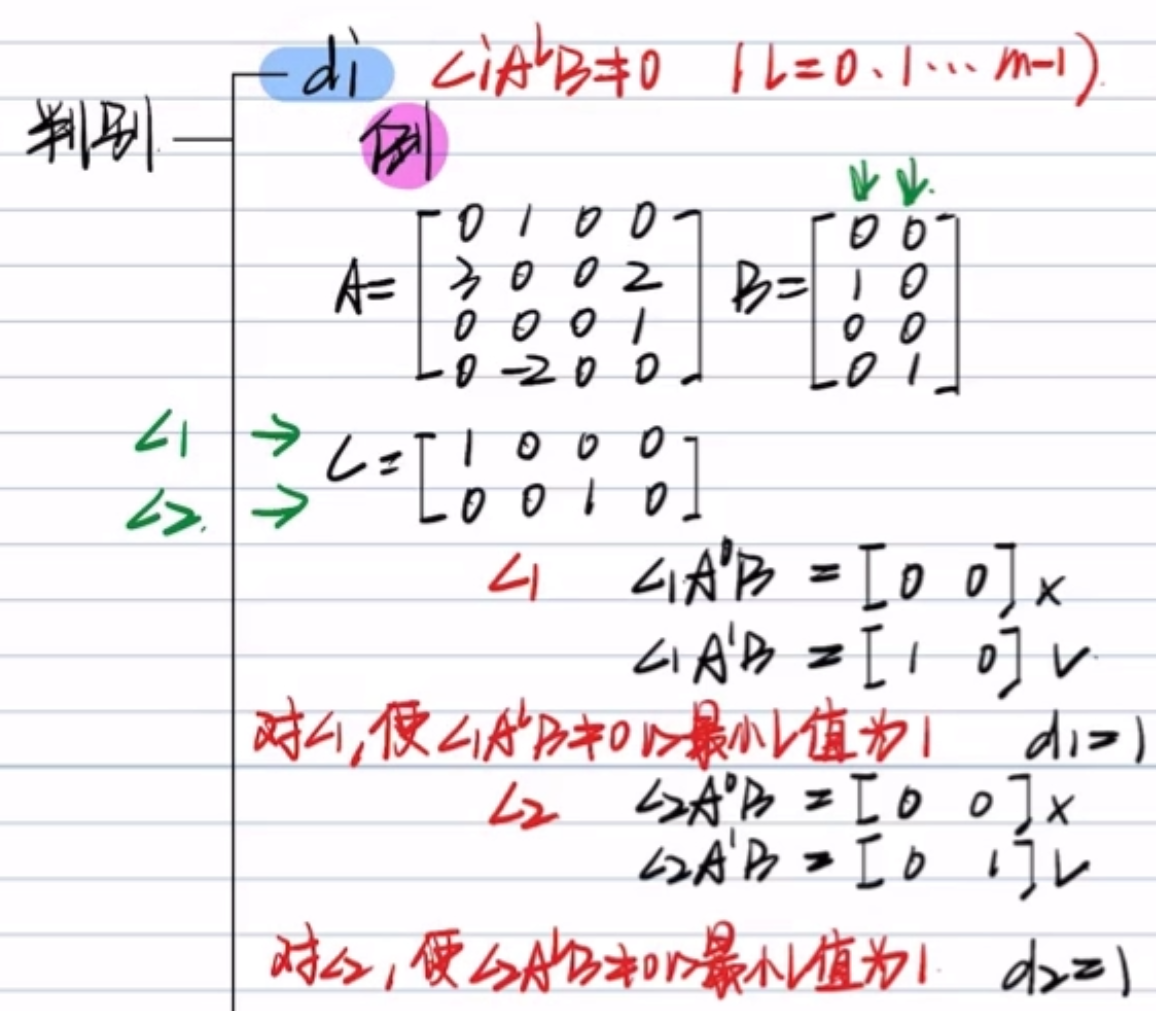
- 代公式
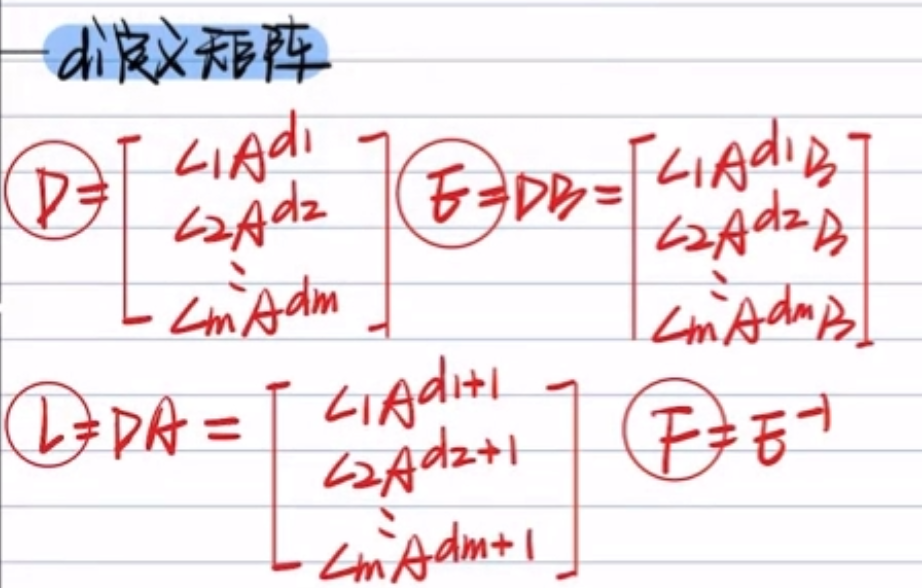
- 判别

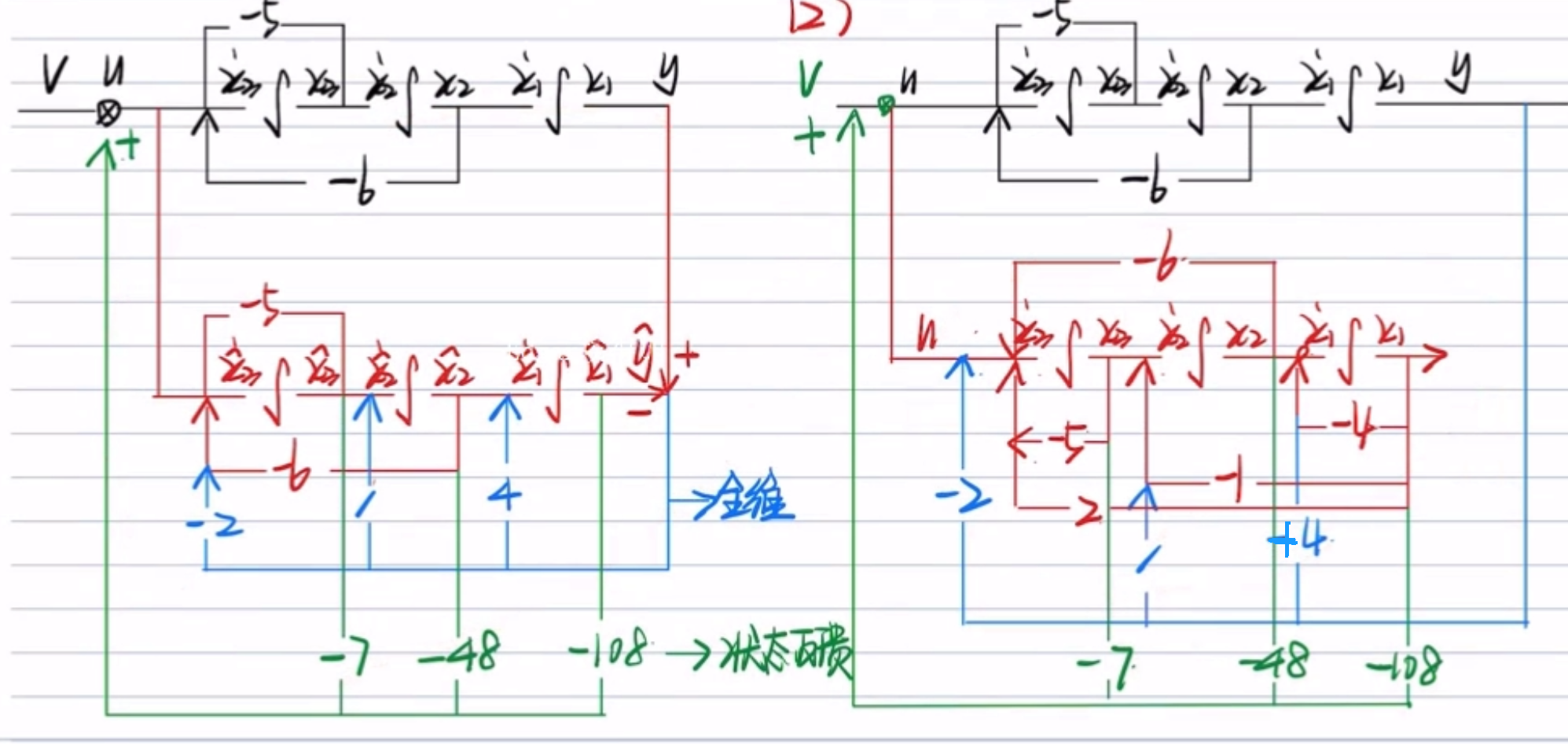
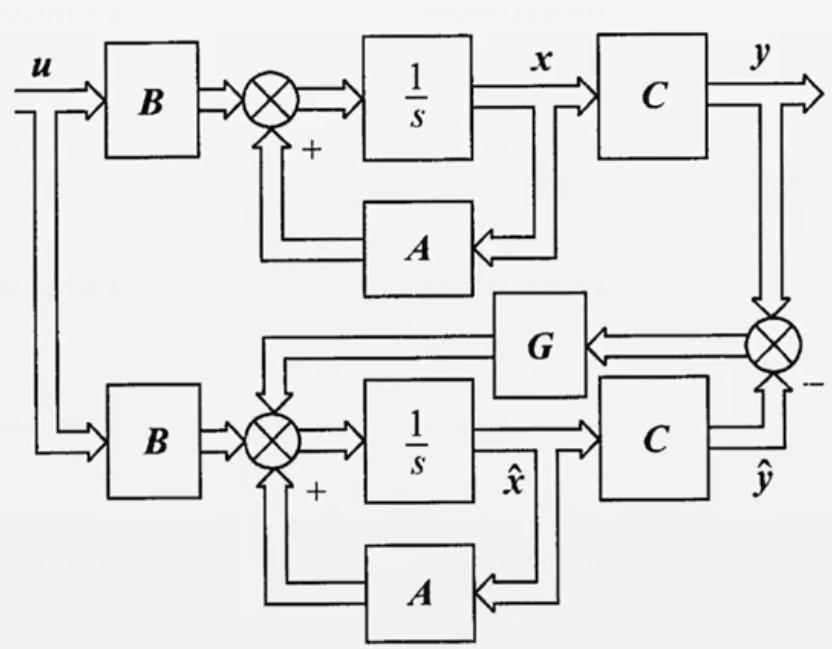
状态观测问题
全维状态观测
结构图示意
本质上是状态反馈

??另一种表述

举例1 全维观测器+列写观测器方程


举例2 状态观测器(输出反馈)+状态反馈
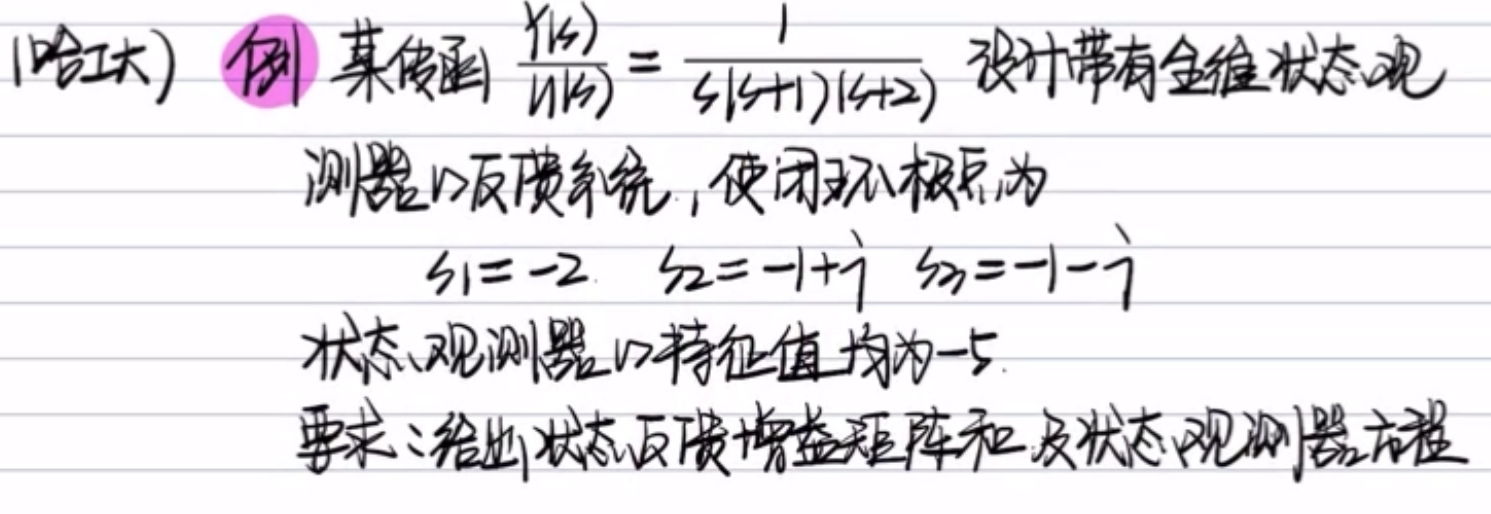
设计观测器和进行状态反馈实际上是完全分开的
- 设计观测器
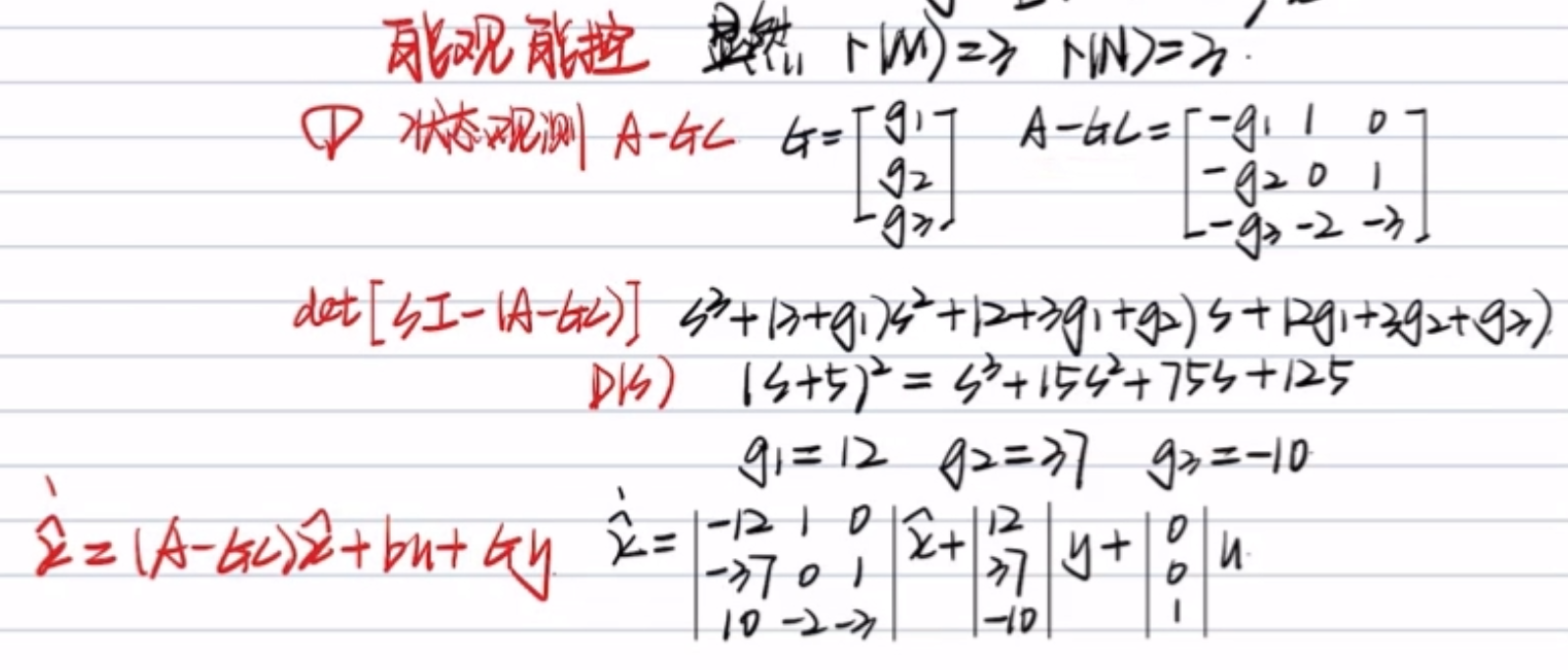
- 设计状态反馈【可以考虑使用技巧方法】
- 模型类似于下图:
动态方程:

两种模型
全维状态观测器的误差求解
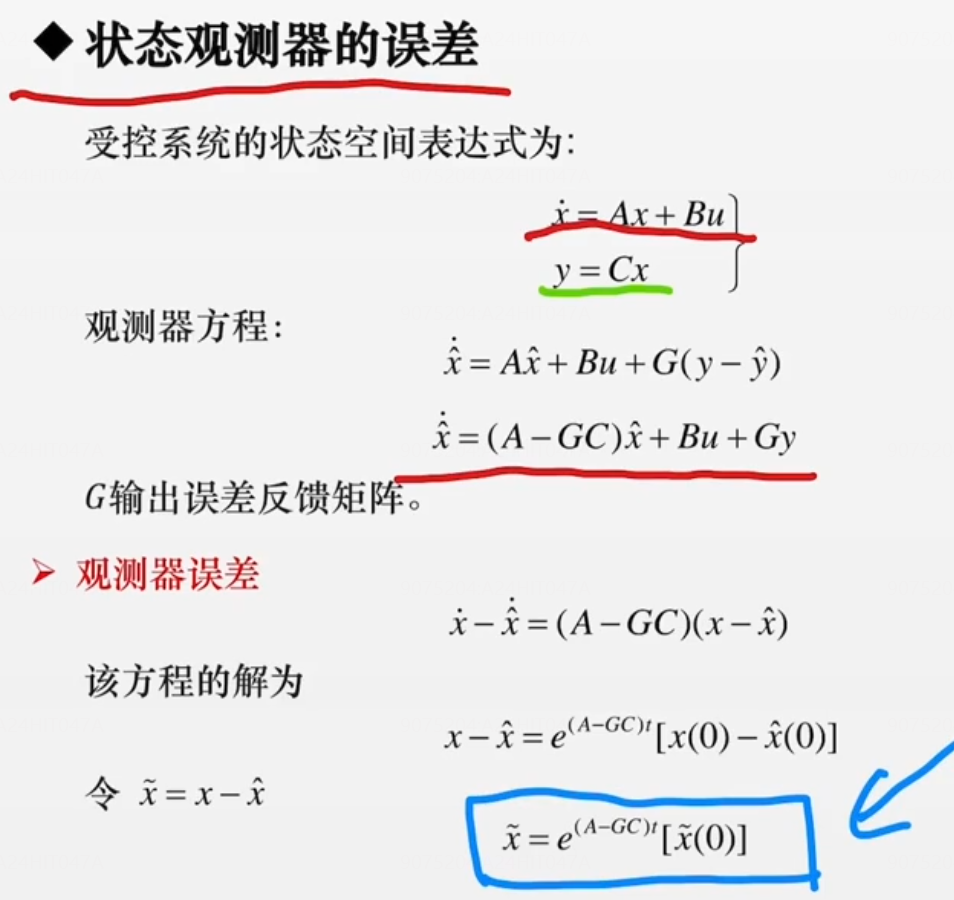
举例【实质上是齐次方程求解问题】

注意最后一步取了一个模长
一个结论:极点距离虚轴越远,趋于稳定的速度越快,调节时间也就越快。
降维观测器
原理是利用通过调整输出对应的输出矩阵,可以获得一部分状态变量的观测值,从而减小传感器的数量等等。
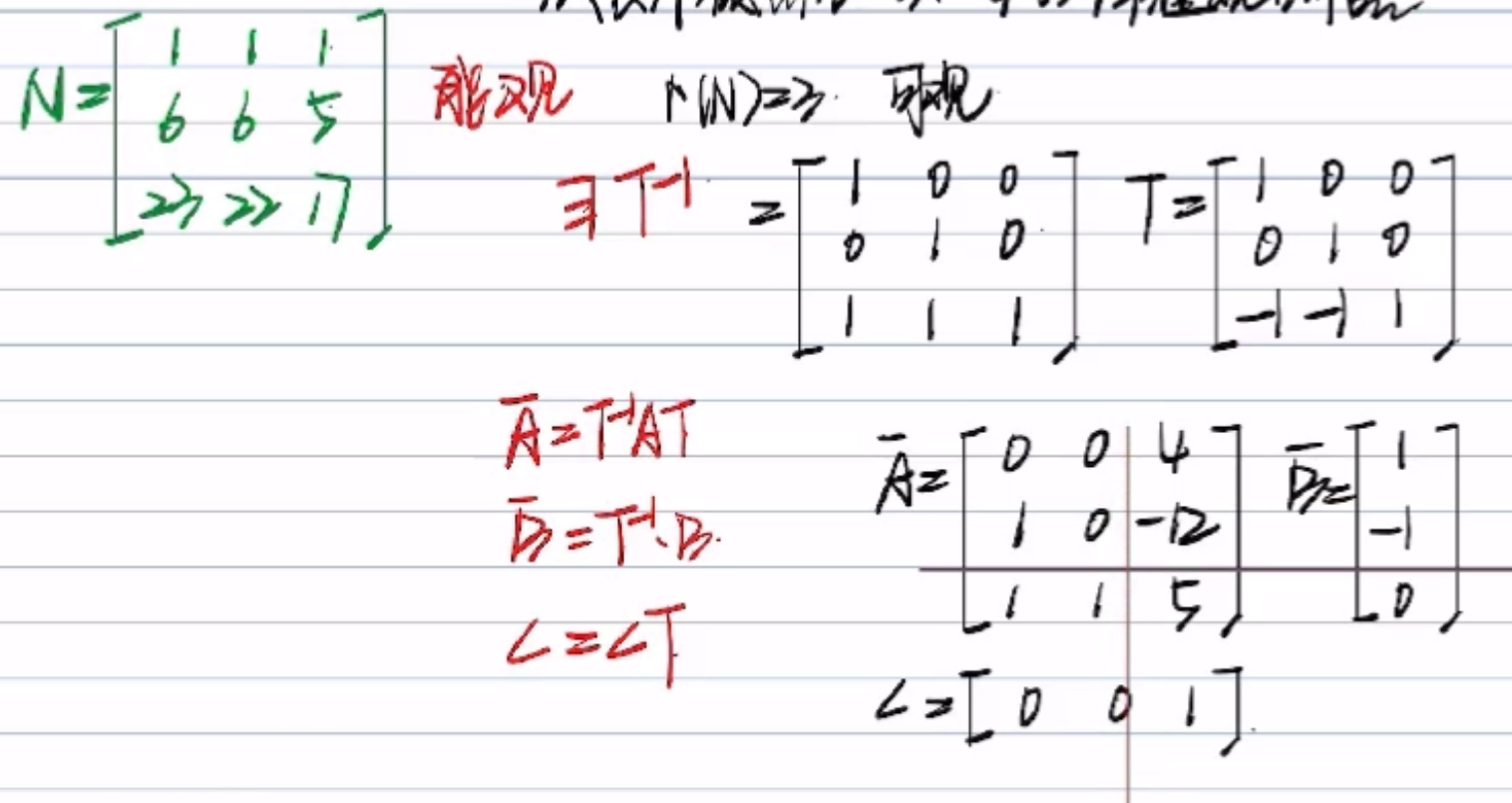
Step01 设计 T ? 1 T^{-1} T?1,线性变换将输出矩阵调整成(0,0,I)形式
类似能观分解,能观分解中的矩阵选择,都是“一部分取原来的,一部分保证非奇异”
区别在于,可观分解是判据阵 前m-1行,这个是输出阵 后m行

T
?
1
T^{-1}
T?1满足以下要求:最后m行为原输出矩阵C,上面的其他行任取,保证非奇异即可
然后以T为非奇异线性变换矩阵,进行线性变换
通常情况下,对输出y相关变量进行矩阵操作时,往往直接得到的是逆
完成线性变换后,可将A矩阵视为 A 11  ̄ , A 12  ̄ , A 21  ̄ , A 22  ̄ \overline{A_{11}},\overline{A_{12}},\overline{A_{21}},\overline{A_{22}} A11??,A12??,A21??,A22??【加横线代表和之前不一样】
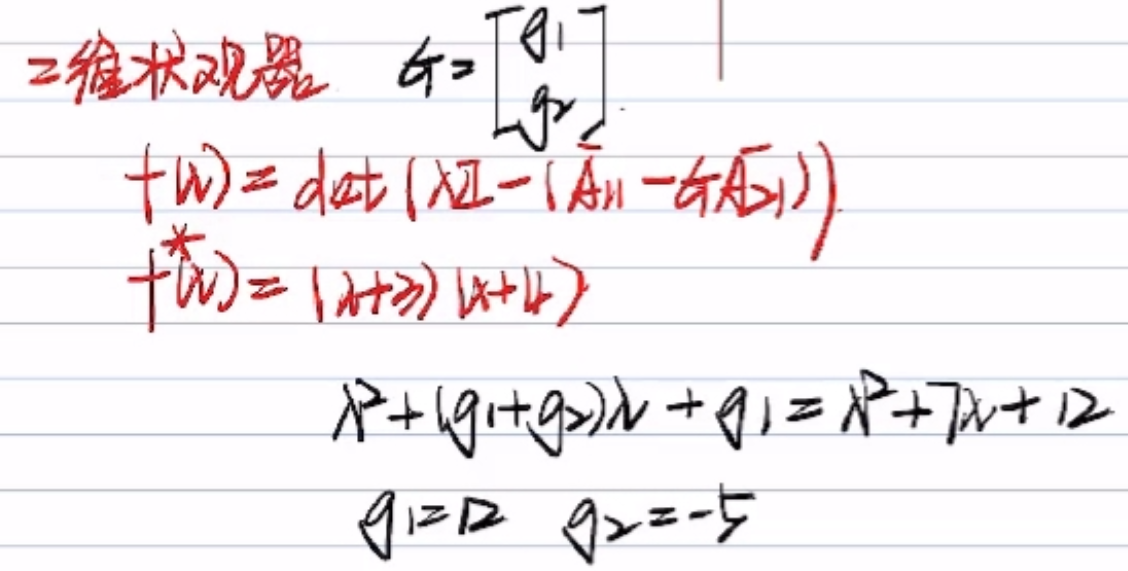
Step02 设计降维状态观测器
按照
A
11
,
A
21
A_{11},A_{21}
A11?,A21?进行极点配置
f
(
λ
)
=
det
?
(
λ
I
?
(
A
11
 ̄
?
G
A
21
 ̄
)
)
f
?
(
λ
)
=
(
λ
?
s
1
)
(
λ
?
s
2
)
.
.
.
(
λ
?
s
n
)
\begin{array}{l} f(\lambda)=\operatorname{det}\left(\lambda I-\left(\overline{A_{11}} -G\overline{A_{21}}\right)\right) \\ f^{*}(\lambda)=(\lambda-s_1)(\lambda-s_2)...(\lambda-s_n) \end{array}
f(λ)=det(λI?(A11???GA21??))f?(λ)=(λ?s1?)(λ?s2?)...(λ?sn?)?
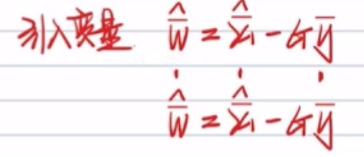
Step03 套公式🌟🌟
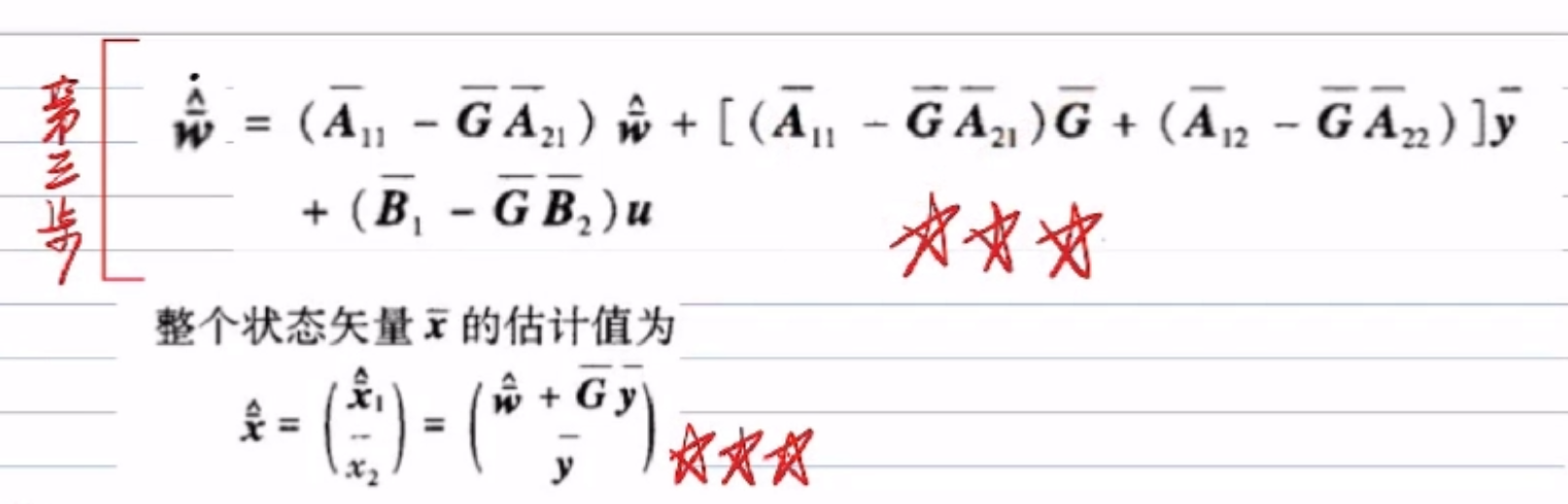
这么做的原因是,原来的表达式里存在 y ˙ \dot y y˙?,不好求解
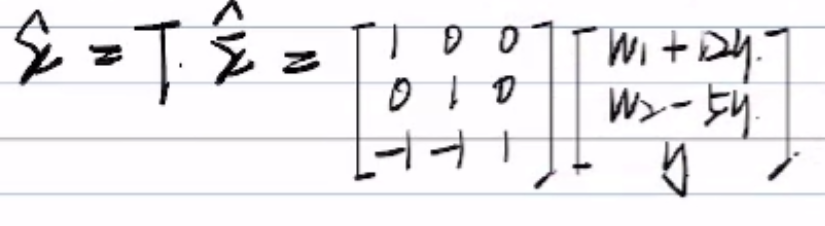
Step04 变回原有系统
上一步结果左乘
T
T
T
x
^
=
T
x
 ̄
^
\hat {x} = T \hat{ \overline{ x}}
x^=Tx^
举例1 降维观测器经典例题
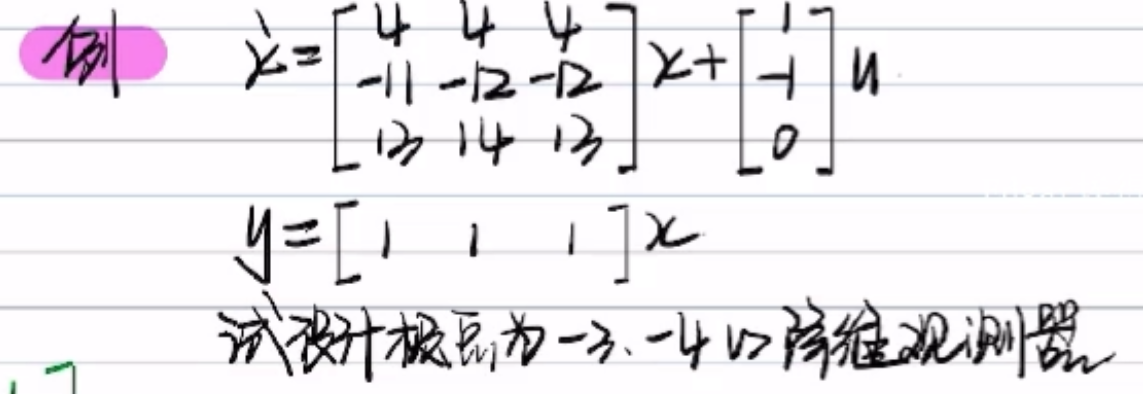
Step01 能观性判断+变换矩阵设计
Step02 设计降维观测器
Step03 代入两个公式

Step04 线性变换变回去
不熟练公式记录
状态方程非齐次求解【积分形式】
状态方程齐次求解和
e
A
t
e^{At}
eAt表达式书写
一般矩阵化能控标准型
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- PTA期末错题集1
- SpringCloud:Eureka服务注册中心
- 24年最新总结的Android学习路线以及全套学习资料,免费分享!
- NXP S32K358 davinci cfg can驱动配置
- Tomcat解压打包文件和并部署
- 通过myBatis将sql语句返回的值自动包装成一个java对象(1)以及SqlSessionFactory
- 学生如何正确使用台灯?精选最合适学生使用的台灯
- Oauth2.0授权篇
- STM32 USB OTG主机模式的实现方法
- 我的年度总结(大一程序员的自述)