msckf_vio在ubuntu20.04中的编译
发布时间:2024年01月07日
1.新建catkin workspace文件夹,并在其中新建src文件夹,并将源码clone至src内。
源码地址:https://github.com/KumarRobotics/msckf_vio
目录层级示意如下,build和devel不必新建,后续指令会自动新建。
2. 在编译之前的准备
1)需要安装random_nuber的包,ubuntu20.04中安装的ros版本为neotic,因此指令为:
sudo apt install ros-noetic-random-numbers
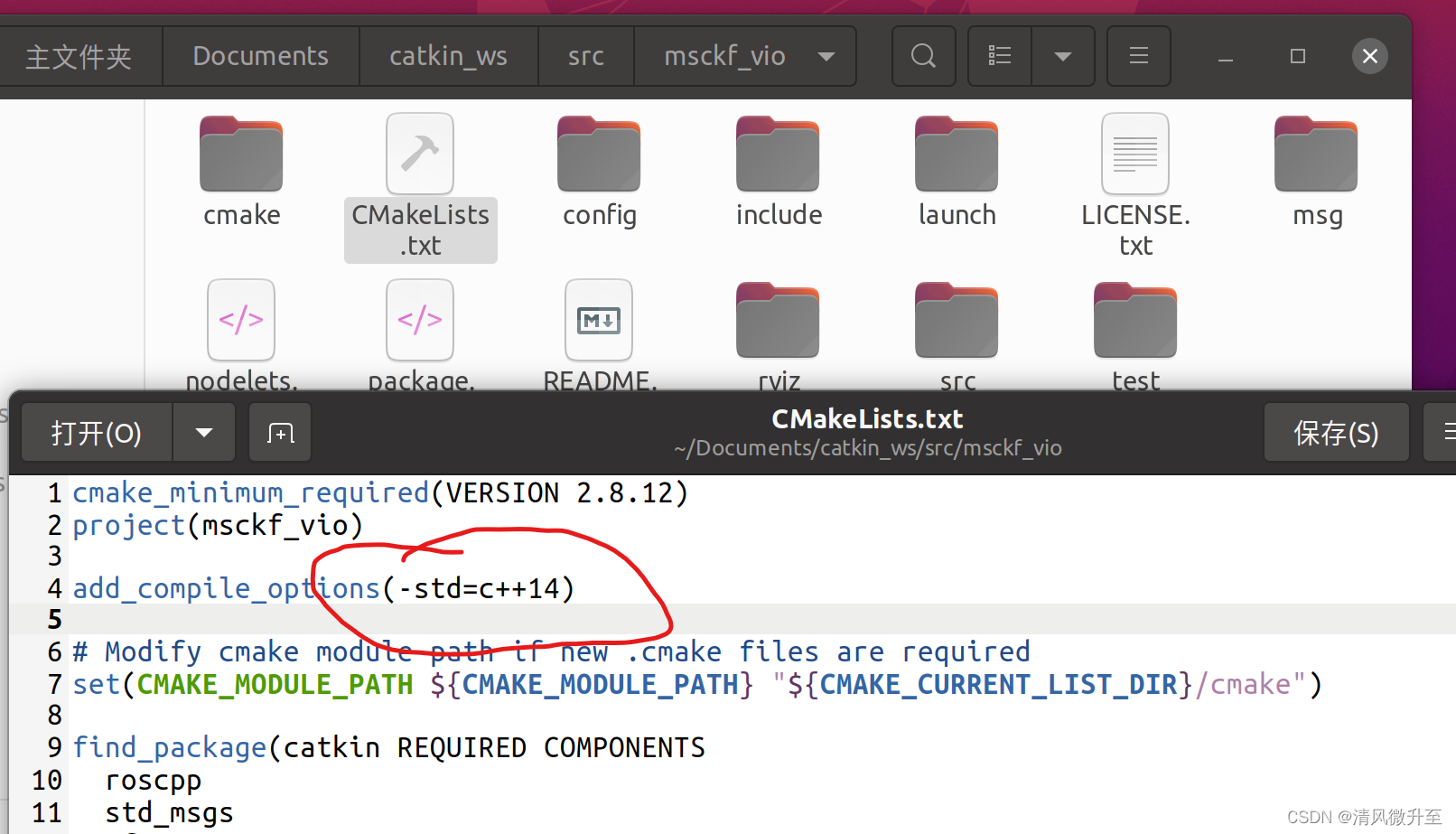
2)此外还可能会碰到pcl报错的问题,可将msckf_vio内的cmakelists的C++11改为C++14解决。
3)安装suitesparse包,指令按照github源码中的readme所给的:
sudo apt-get install libsuitesparse-dev
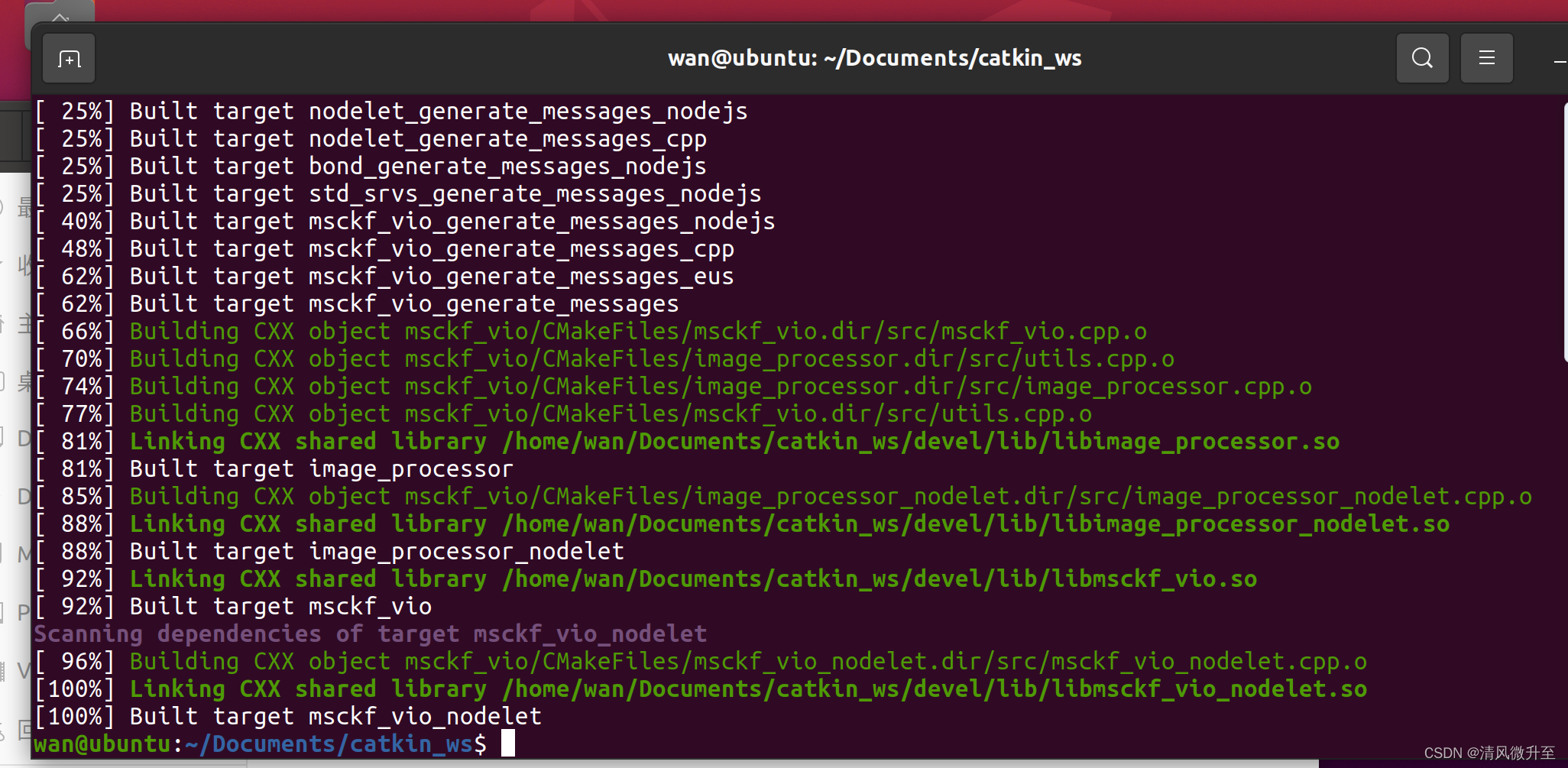
3 编译
在src那一层目录,执行
catkin_make --pkg msckf_vio --cmake-args -DCMAKE_BUILD_TYPE=Release
进行编译。
文章来源:https://blog.csdn.net/m0_38095099/article/details/135441549
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- AD采集卡设计方案:630-基于PCIe的高速模拟AD采集卡
- [BUG记录]Can没有按照预期的周期刷新
- YOLOv5改进 | 损失函数篇 | InnerIoU、InnerSIoU、InnerWIoU、FocusIoU等损失函数
- Statistics with Python: Week2 Nhanes Assignment
- 配置镜像yum源
- 数据库中如何修改和删除字段
- bxCAN-测试模式
- fopen函数
- 代码训练营Day.17 | 110. 平衡二叉树
- 书生·浦语大模型实战营 Lesson 2