大创项目推荐 深度学习YOLO抽烟行为检测 - python opencv
1 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 基于深度学习YOLO抽烟行为检测
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
1 课题背景
公共场合抽烟的危害很大,国家也相应地出台了在公共场合禁烟的政策。以前实行相关的政策都是靠工作人员巡逻发现并出言禁止,这样做效率很低下。计算机视觉领域发展迅速,而抽烟检测也属于一种计算机视觉目标检测的行为,可以采用目标检测的方法来实现。目前,目标检测在很多领域都取得显著成就,但是在抽烟检测领域方面进行研究却几乎没有。该研究可以有效节省成本,对公共场合禁烟政策的实行有很大的推动作用。
2 实现效果

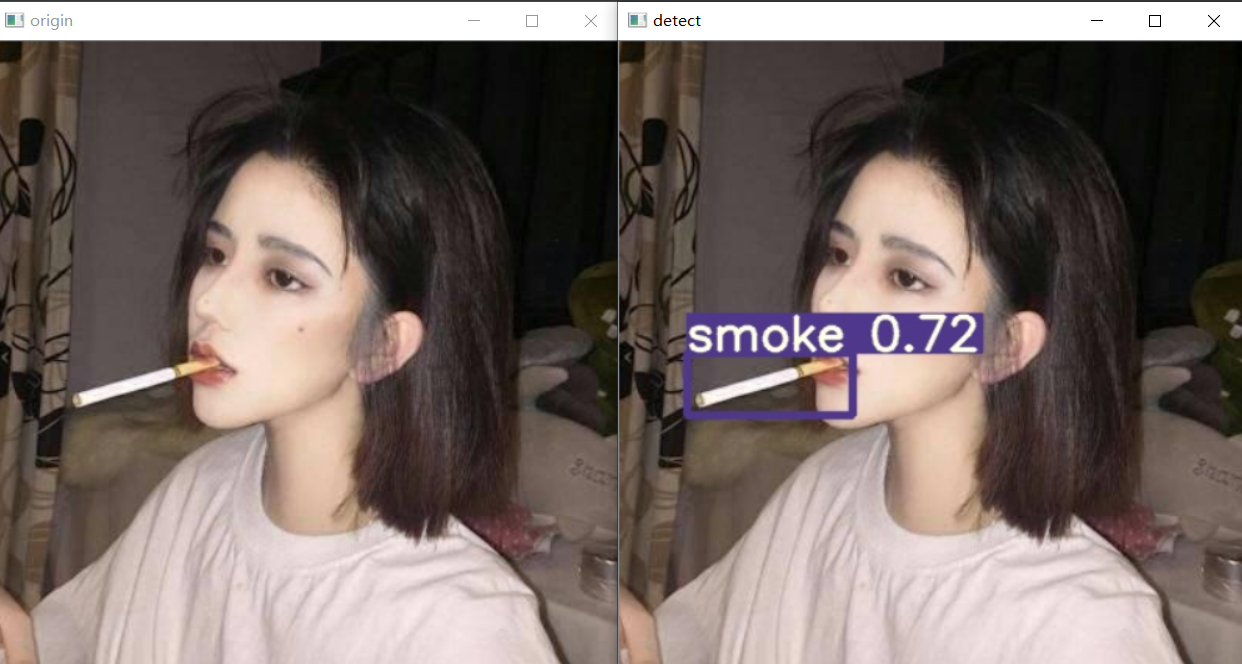

左图为原图,右图为推理后的图片,以图片方式展示,视频流和实时流也能达到这个效果,由于视频转GIF大小原因,这里暂不演示。
3 Yolov5算法
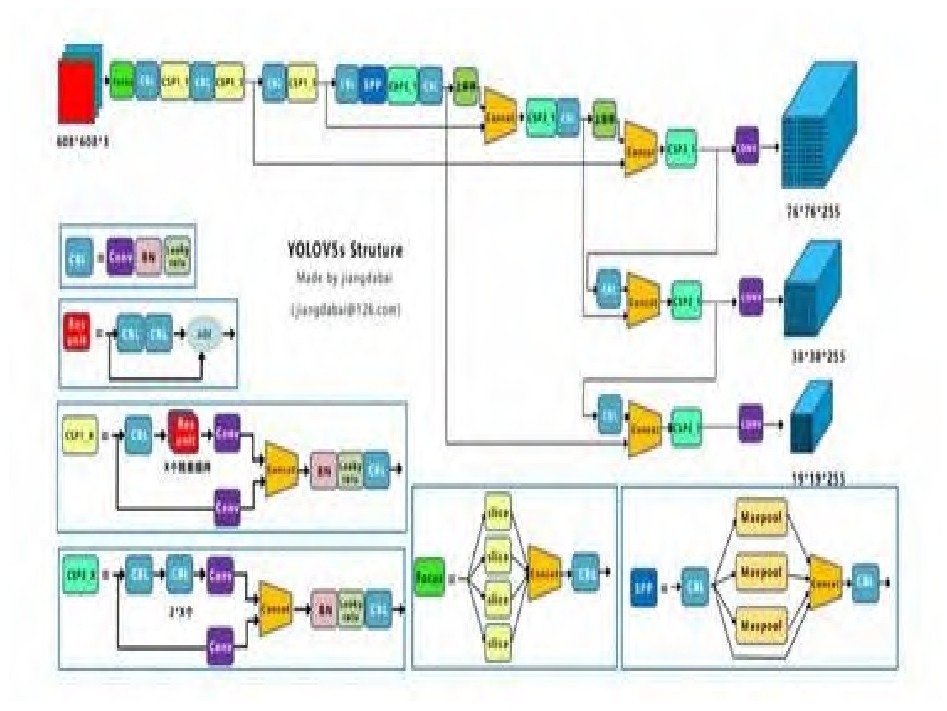
3.1 简介
YOLO系列是基于深度学习的回归方法。该系列陆续诞生出YOLOv1、YOLOv2、YOLOv3、YOLOv4、YOLOv5。YOLOv5算法,它是一种单阶段目标检测的算法,该算法可以根据落地要求灵活地通过chaneel和layer的控制因子来配置和调节模型,所以在比赛和落地中应用比较多。同时它有YOLOv5x、YOLOv5l、YOLOv5m、YOLOv5s四种模型。
具有以下优点:
- 在pytorch环境下编写;
- 可以很容易编译成ON?NX和Core ML;
- 运行速度很快,每秒可以达到140FPS的速度;
- 模型精度高;
- 集成了YOLOv3和YOLOv4的部分优秀特性,进行了推陈出新的改进。
3.2 相关技术
Mosaic数据增强
Mosaic数据增强技术采用了四张图片的随机缩放、随机剪裁、随机排布的方式对数据进行拼接,相比CutMix数据增强多用了两张图片。在目标识别过程中,要识别的目标有大目标、中等目标、小目标,并且三种目标的占比例不均衡,其中,小目标的数量是最多的,但是出现的频率很低,这种情况就会导致在bp时对小目标的优化不足,模型正确识别小目标的难度比识别中、大目标的难度要大很多,于是对于小目标来说很容易出现误检和漏检的情况。Mosaic数据增强技术做出改进后,上述的问题得到有效的解决。
该技术的优点是:
- 丰富了数据集,采用“三个随机”的方式对数据进行拼接丰富了检测的数据集,尤其是随机缩放增加了很多小目标,克服了小目标的不足,让网络的鲁棒性得到提高;
- 减少GPU的使用,在Mosaic增强训练时,四张图片拼接在一起,GPU可以直接计算四张图片的数据,让Mini-batch的大小减少了很多,这使得一个GPU就可以达到比较可观的效果。
自适应anchor
自适应anchor是check_anchors函数通过遗传算法与Kmeans迭代算出的最大可能召回率的anchor组合。在网络模型的训练过程中,网络在初始化的锚框的基础上输出预测框,然后与真实框groundtruth进行对比,计算两个框之间的差值,再根据差值进行反向更新,迭代网络参数,最后求出最佳的锚框值。自适应的anchor能够更好地配合网络训练,提高模型的精度,减少对anchor的设计难度,具有很好的实用性。
自适应图片缩放
为了提高模型的推理速度,YOLOv5提出自适应图片缩放,根据长宽比对图像进行缩放,并添加最少的黑边,减少计算量。该方法是用缩放后的长边减去短边再对32进行取余运算,求出padding。在训练时并没有采用缩减黑边的方法,该方法只是在测试模型推理的时候才使用,这样提高了目标检测的准确率和速度。
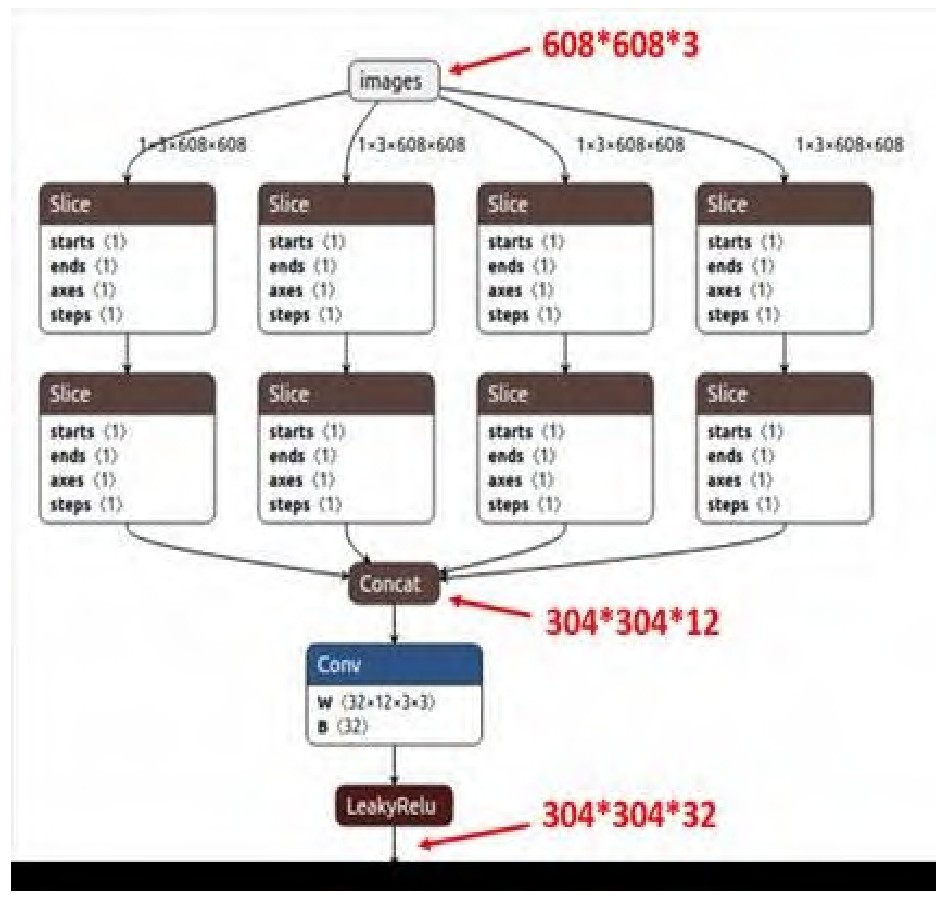
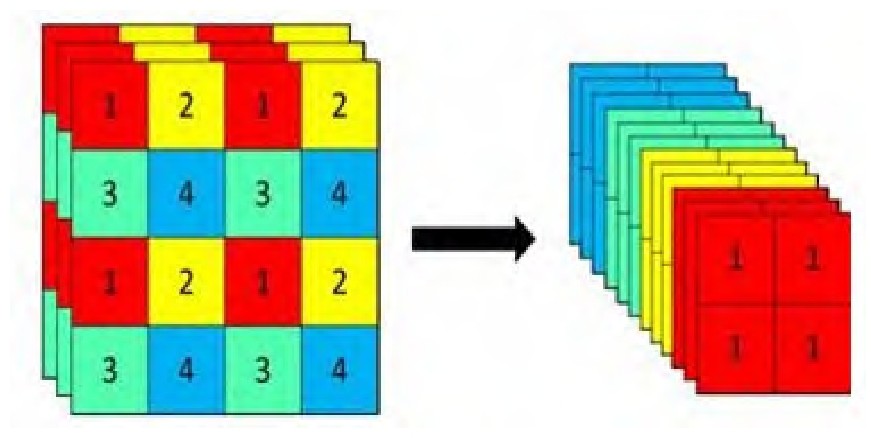
Focus结构
该结构采用切片操作,将特征切片成四份,每一份将当成下采样的特征,然后在channel维度进行concat。例如:原始608 608
3的数据图片,经过切片操作先变成304 304 12的特征图,再经过一次32个卷积核的卷积操作,变成304 304 32的特征图。
CSP结构
YOLOv5中的CSP[5]结构应用于两处,一处是CSP1_X结构应用于Backbone的主干网络中,另一处的CSP2_X结构应用于Neck中,用于加强网络的特征融合的能力。CSPNet主要从网络结构设计的角度解决推理中从计算量很大的问题。该结构的优点有:1)增强CNN的学习能力,使得模型在轻量化的同时保持较高的准确性;2)减低计算的瓶颈问题;3)减低内存的分险。
PFN+PAN结构
这个结构是FPN和PAN的联合。FPN是自顶向下的,将高层的特征信息通过上采样的方式进行传递融合,得到进行预测的特征图,而PAN正好与FPN的方向是相反的方向,它是自底向上地采取特征信息。两个结构各自从不同的主干层对不同的检测层进行参数聚合。两个结构的强强联合让得到的特征图的特征更加明显和清楚。
Bounding box的损失函数
Bounding
box损失函数[6]增加了相交尺度的衡量方式,有效缓解了当两个框不相交和两个框大小完全相同的两种特殊情况。因为当预测框和目标框不相交时,IOU=0,无法反应两个框距离的远近的时候,此时的损失函数不可导;两个框大小完全相同,两个IOU也相同,IOU_LOSS无法区分以上两种特殊情况。
nms非极大值抑制
在目标检测过程的后续处理中,对于大量的目标框的筛选问题,通常会进行nms操作,以此来达到一个不错的效果。YO?LOv5算法同样采用了加权的nms操作。
4 数据集处理及实验
数据集准备
由于目前针对吸烟图片并没有现成的数据集,我们使用Python爬虫利用关键字在互联网上获得的图片数据,编写程序爬了1w张,筛选下来有近1000张可用,以及其他途径获取到的,暂时可用数据集有5k张,
深度学习图像标注软件众多,按照不同分类标准有多中类型,本文使用LabelImg单机标注软件进行标注。LabelImg是基于角点的标注方式产生边界框,对图片进行标注得到xml格式的标注文件,由于边界框对检测精度的影响较大因此采用手动标注,并没有使用自动标注软件。
考虑到有的朋友时间不足,博主提供了标注好的数据集和训练好的模型,需要请联系。
数据标注简介
通过pip指令即可安装
?
pip install labelimg
在命令行中输入labelimg即可打开

5 部分核心代码
?
# data/smoke.yaml
# COCO 2017 dataset http://cocodataset.org
# Download command: bash yolov5/data/get_coco2017.sh
# Train command: python train.py --data ./data/coco.yaml
# Dataset should be placed next to yolov5 folder:
# /parent_folder
# /coco
# /yolov5
# train and val datasets (image directory or *.txt file with image paths)
train: data\train.txt # 上面我们生成的train,根据自己的路径进行更改
val: data\test.txt # 上面我们生成的test
#test: ../coco/test-dev2017.txt # 20k images for submission to https://competitions.codalab.org/competitions/20794
# number of classes
nc: 1 #训练的类别
# class names
names: ['smoke']
# Print classes
# with open('data/coco.yaml') as f:
# d = yaml.load(f, Loader=yaml.FullLoader) # dict
# for i, x in enumerate(d['names']):
# print(i, x)
# model/yolov5s.yaml
# parameters
nc: 1 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
# anchors
anchors:
- [116,90, 156,198, 373,326] # P5/32
- [30,61, 62,45, 59,119] # P4/16
- [10,13, 16,30, 33,23] # P3/8
# YOLOv5 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, BottleneckCSP, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 9, BottleneckCSP, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, BottleneckCSP, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
]
# YOLOv5 head
head:
[[-1, 3, BottleneckCSP, [1024, False]], # 9
[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, BottleneckCSP, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, BottleneckCSP, [256, False]],
[-1, 1, nn.Conv2d, [na * (nc + 5), 1, 1]], # 18 (P3/8-small)
[-2, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, BottleneckCSP, [512, False]],
[-1, 1, nn.Conv2d, [na * (nc + 5), 1, 1]], # 22 (P4/16-medium)
[-2, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, BottleneckCSP, [1024, False]],
[-1, 1, nn.Conv2d, [na * (nc + 5), 1, 1]], # 26 (P5/32-large)
[[], 1, Detect, [nc, anchors]], # Detect(P5, P4, P3)
]
# 训练部分主函数
if __name__ == '__main__':
check_git_status()
parser = argparse.ArgumentParser()
parser.add_argument('--epochs', type=int, default=300)
parser.add_argument('--batch-size', type=int, default=16)
parser.add_argument('--cfg', type=str, default='models/yolov5s.yaml', help='*.cfg path')
parser.add_argument('--data', type=str, default='data/smoke.yaml', help='*.data path')
parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='train,test sizes')
parser.add_argument('--rect', action='store_true', help='rectangular training')
parser.add_argument('--resume', action='store_true', help='resume training from last.pt')
parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
parser.add_argument('--notest', action='store_true', help='only test final epoch')
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
parser.add_argument('--weights', type=str, default='', help='initial weights path')
parser.add_argument('--name', default='', help='renames results.txt to results_name.txt if supplied')
parser.add_argument('--device', default='0', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--adam', action='store_true', help='use adam optimizer')
parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%')
parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
opt = parser.parse_args()
opt.weights = last if opt.resume else opt.weights
opt.cfg = check_file(opt.cfg) # check file
opt.data = check_file(opt.data) # check file
print(opt)
opt.img_size.extend([opt.img_size[-1]] * (2 - len(opt.img_size))) # extend to 2 sizes (train, test)
device = torch_utils.select_device(opt.device, apex=mixed_precision, batch_size=opt.batch_size)
if device.type == 'cpu':
mixed_precision = False
# Train
if not opt.evolve:
tb_writer = SummaryWriter(comment=opt.name)
print('Start Tensorboard with "tensorboard --logdir=runs", view at http://localhost:6006/')
train(hyp)
# Evolve hyperparameters (optional)
else:
tb_writer = None
opt.notest, opt.nosave = True, True # only test/save final epoch
if opt.bucket:
os.system('gsutil cp gs://%s/evolve.txt .' % opt.bucket) # download evolve.txt if exists
for _ in range(10): # generations to evolve
if os.path.exists('evolve.txt'): # if evolve.txt exists: select best hyps and mutate
# Select parent(s)
parent = 'single' # parent selection method: 'single' or 'weighted'
x = np.loadtxt('evolve.txt', ndmin=2)
n = min(5, len(x)) # number of previous results to consider
x = x[np.argsort(-fitness(x))][:n] # top n mutations
w = fitness(x) - fitness(x).min() # weights
if parent == 'single' or len(x) == 1:
# x = x[random.randint(0, n - 1)] # random selection
x = x[random.choices(range(n), weights=w)[0]] # weighted selection
elif parent == 'weighted':
x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
# Mutate
mp, s = 0.9, 0.2 # mutation probability, sigma
npr = np.random
npr.seed(int(time.time()))
g = np.array([1, 1, 1, 1, 1, 1, 1, 0, .1, 1, 0, 1, 1, 1, 1, 1, 1, 1]) # gains
ng = len(g)
v = np.ones(ng)
while all(v == 1): # mutate until a change occurs (prevent duplicates)
v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
hyp[k] = x[i + 7] * v[i] # mutate
# Clip to limits
keys = ['lr0', 'iou_t', 'momentum', 'weight_decay', 'hsv_s', 'hsv_v', 'translate', 'scale', 'fl_gamma']
limits = [(1e-5, 1e-2), (0.00, 0.70), (0.60, 0.98), (0, 0.001), (0, .9), (0, .9), (0, .9), (0, .9), (0, 3)]
for k, v in zip(keys, limits):
hyp[k] = np.clip(hyp[k], v[0], v[1])
# Train mutation
results = train(hyp.copy())
# Write mutation results
print_mutation(hyp, results, opt.bucket)
# Plot results
# plot_evolution_results(hyp)
?
6 最后
🧿 更多资料, 项目分享:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!