YOLOv7姿态估计pose estimation(姿态估计-目标检测-跟踪)

YOLOv7姿态估计(pose estimation)是一种基于YOLOv7算法的姿态估计方法。该算法使用深度学习技术,通过分析图像中的人体关键点位置,实现对人体姿态的准确估计。
姿态估计是计算机视觉领域的重要任务,它可以识别人体的关节位置和姿势,从而为人体行为分析、动作识别、运动捕捉等应用提供基础支持。YOLOv7姿态估计算法通过端到端的训练和推理过程,能够快速、准确地检测和估计人体的姿态信息。
YOLOv7姿态估计算法的核心思想是将姿态估计问题转化为目标检测问题。它使用YOLOv7网络结构进行图像的目标检测,并在检测到的人体目标上进行关键点定位。通过预测人体关键点的位置,可以进一步计算出人体的姿态信息。
与传统的姿态估计方法相比,YOLOv7姿态估计算法具有以下优势:首先,它采用了YOLOv7的快速检测器,能够在保持高准确率的同时实现实时的姿态估计。其次,它使用了端到端的训练和推理过程,减少了传统方法中的多个阶段和复杂的流程,简化了算法的实现和应用。
YOLOv7姿态估计算法在人体姿态估计领域取得了显著的成果,并在一些人体行为分析、动作识别等应用中得到了广泛应用。它为计算机视觉领域的研究者和开发者提供了一种高效、准确的姿态估计解决方案。
总之,YOLOv7姿态估计是一种基于YOLOv7算法的快速、准确的姿态估计方法。它通过图像中的目标检测和关键点定位,实现对人体姿态的精确估计。该方法在计算机视觉领域有着广泛的应用前景,并为相关领域的研究和开发提供了重要的技术支持。
概述
YOLOv7姿态估计:一种快速准确的人体姿态估计模型
人体姿态估计是计算机视觉中的一项重要任务,具有各种应用,例如动作识别、人机交互和监控。近年来,基于深度学习的方法在人体姿态估计方面取得了显著的性能。其中最流行的深度学习方法之一是YOLOv7姿态估计模型。
算法
YOLOv7姿态估计模型是YOLOv7目标检测模型的扩展,使用单个神经网络同时预测图像中多个物体的边界框和类别概率。在YOLOv7姿态估计模型中,网络预测每个人的关键点位置,从而可以用于估计人的姿态。

网络
YOLOv7姿态估计模型基于深度卷积神经网络架构,由多个卷积层、最大池化和全连接层组成。网络接受输入图像并产生特征图,然后用于预测每个人的关键点位置。
?
数据集
YOLOv7姿态估计模型使用大型数据集进行训练,例如COCO(通用对象上下文)和MPII(马克斯·普朗克计算机科学研究所),这些数据集包含成千上万的人在各种姿势和环境中的注释图像。该模型使用监督学习和数据增强技术进行训练,例如随机缩放、旋转和平移输入图像。
?
优势
YOLOv7姿态估计模型的一个关键优势是其速度和准确性。该模型能够实时估计多个人的姿态,使其适用于人机交互和监控等应用。此外,该模型在COCO和MPII等基准数据集上实现了最先进的性能,展示了其准确性和鲁棒性。

结论
总之,YOLOv7姿态估计模型是一种快速准确的基于深度学习的人体姿态估计模型。其能够实时估计多个人的姿态,使其适用于各种应用,而其在基准数据集上的最先进性能证明了其有效性。随着深度学习的不断发展,我们可以预期在人体姿态估计方面会有进一步的改进,而YOLOv7姿态估计模型很可能在这些发展中发挥重要作用。

代码?
#全部代码可私信或者qq1309399183
def run(poseweights="yolov7-w6-pose.pt",source="football1.mp4",device='cpu',view_img=False,
save_conf=False,line_thickness = 3,hide_labels=False, hide_conf=True):
frame_count = 0 #count no of frames
total_fps = 0 #count total fps
time_list = [] #list to store time
fps_list = [] #list to store fps
device = select_device(opt.device) #select device
half = device.type != 'cpu'
model = attempt_load(poseweights, map_location=device) #Load model
_ = model.eval()
names = model.module.names if hasattr(model, 'module') else model.names # get class names
if source.isnumeric() :
cap = cv2.VideoCapture(int(source)) #pass video to videocapture object
else :
cap = cv2.VideoCapture(source) #pass video to videocapture object
if (cap.isOpened() == False): #check if videocapture not opened
print('Error while trying to read video. Please check path again')
raise SystemExit()
else:
frame_width = int(cap.get(3)) #get video frame width
frame_height = int(cap.get(4)) #get video frame height
vid_write_image = letterbox(cap.read()[1], (frame_width), stride=64, auto=True)[0] #init videowriter
resize_height, resize_width = vid_write_image.shape[:2]
out_video_name = f"{source.split('/')[-1].split('.')[0]}"
out = cv2.VideoWriter(f"{source}_keypoint.mp4",
cv2.VideoWriter_fourcc(*'mp4v'), 30,
(resize_width, resize_height))
while(cap.isOpened): #loop until cap opened or video not complete
print("Frame {} Processing".format(frame_count+1))
ret, frame = cap.read() #get frame and success from video capture
if ret: #if success is true, means frame exist
orig_image = frame #store frame
image = cv2.cvtColor(orig_image, cv2.COLOR_BGR2RGB) #convert frame to RGB
image = letterbox(image, (frame_width), stride=64, auto=True)[0]
image_ = image.copy()
image = transforms.ToTensor()(image)
image = torch.tensor(np.array([image.numpy()]))
image = image.to(device) #convert image data to device
image = image.float() #convert image to float precision (cpu)
start_time = time.time() #start time for fps calculation
with torch.no_grad(): #get predictions
output_data, _ = model(image)
output_data = non_max_suppression_kpt(output_data, #Apply non max suppression
0.25, # Conf. Threshold.
0.65, # IoU Threshold.
nc=model.yaml['nc'], # Number of classes.
nkpt=model.yaml['nkpt'], # Number of keypoints.
kpt_label=True)
output = output_to_keypoint(output_data)
im0 = image[0].permute(1, 2, 0) * 255 # Change format [b, c, h, w] to [h, w, c] for displaying the image.
im0 = im0.cpu().numpy().astype(np.uint8)
im0 = cv2.cvtColor(im0, cv2.COLOR_RGB2BGR) #reshape image format to (BGR)
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
for i, pose in enumerate(output_data): # detections per image
if len(output_data): #check if no pose
for c in pose[:, 5].unique(): # Print results
n = (pose[:, 5] == c).sum() # detections per class
print("No of Objects in Current Frame : {}".format(n))
for det_index, (*xyxy, conf, cls) in enumerate(reversed(pose[:,:6])): #loop over poses for drawing on frame
c = int(cls) # integer class
kpts = pose[det_index, 6:]
label = None if opt.hide_labels else (names[c] if opt.hide_conf else f'{names[c]} {conf:.2f}')
plot_one_box_kpt(xyxy, im0, label=label, color=colors(c, True),
line_thickness=opt.line_thickness,kpt_label=True, kpts=kpts, steps=3,
orig_shape=im0.shape[:2])
环境安装教程
#1.克隆项目并进入
#联系我:然后git clone my_projcet
?2.linux创建虚拟环境
python3 -m venv psestenv
source psestenv/bin/activate
3.如果windows用户请用这个:
python3 -m venv psestenv cd psestenv
cd Scripts activate
cd ..
cd ..
pip install --upgrade pip
4.
- pip install
pip install -r requirements.txt
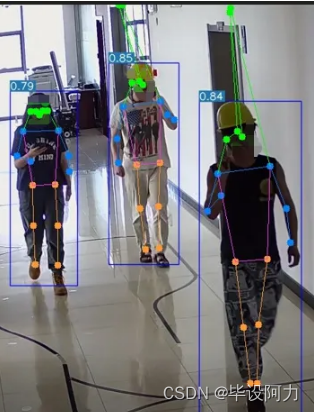
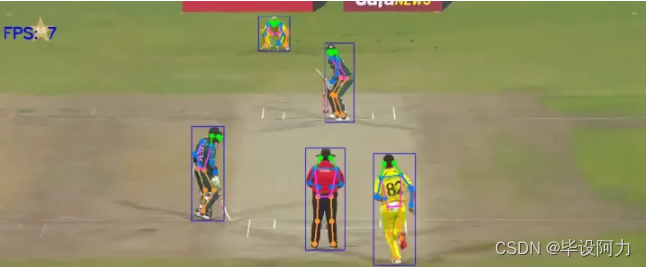
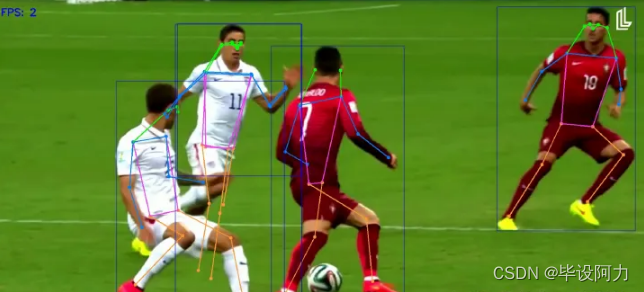
结果展示
更多视觉相关项目见专栏!。如果对你有用,欢迎私聊点赞交流
?
?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Redis分布式锁存在的问题及解决方案(值得珍藏)
- 使用LangChain框架加载与解析txt,markdown,pdf,jpg格式文档
- C语言多线程编程-线程终止
- 算法训练第四十六天|139. 单词拆分
- Conda环境基础使用方法
- 解决URI is not hierarchical错误,解决java打包成jar包访问文件的路径报错问题
- 算法每日一题:从列表中移除节点 | 链表与栈
- 一次应急响应记录
- 算法-二分专题
- 计算矩阵边缘元素之和(c++)