为什么使用 atan2(sin(z), cos(z)) 进行角度归一化?
发布时间:2024年01月16日
atan2 方法返回 -π 到 π 之间的值,代表点 (x, y) 相对于正X轴的偏移角度。这个角度是逆时针测量的,以弧度为单位。关于 atan2 函数为什么能够用于角度归一化,并且为什么 atan2(sin(z), cos(z)) 返回的角度等同于原始角度 z 的归一化值,让我们详细探讨一下:
为什么使用 atan2(sin(z), cos(z)) 进行归一化?
- 周期性:
sin(z)和cos(z)函数都是周期性的,它们的值对于z和z + 2πk(其中k是任意整数)是相同的。这意味着无论z的初始值如何,sin(z)和cos(z)总是将其映射回一个周期内。
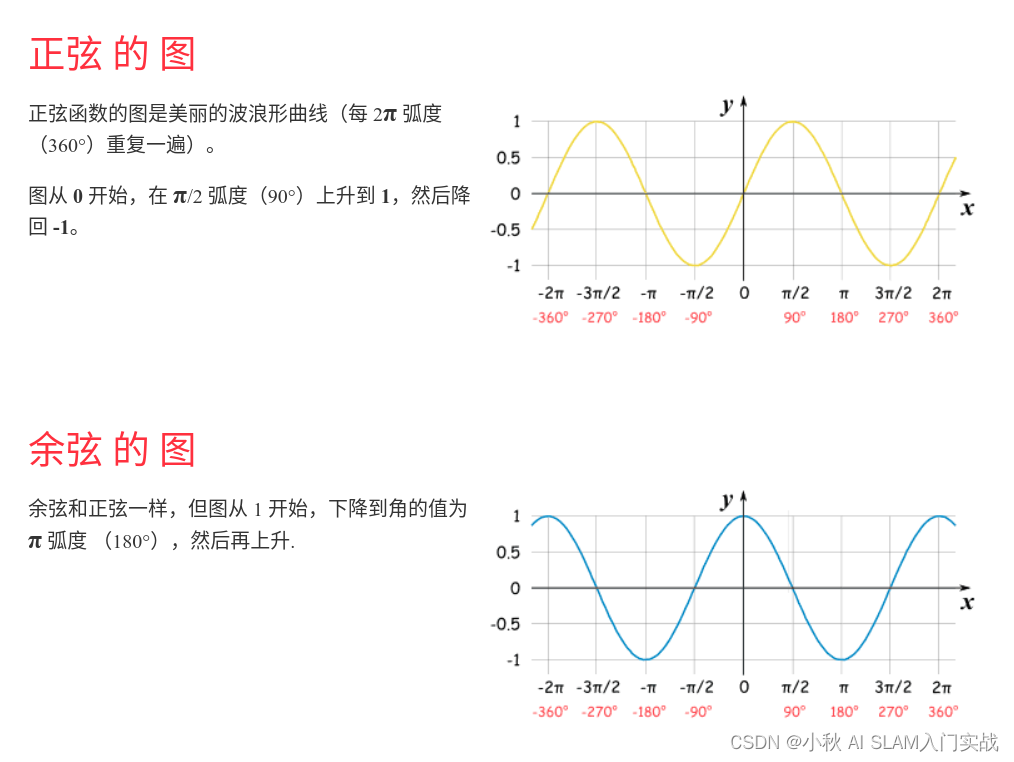
- 单位圆的表示:
- 点
(cos(z), sin(z))表示在单位圆上的一个点,其中z是从正X轴到这个点的逆时针角度。 - 因此,无论
z的原始值是多少,点(cos(z), sin(z))都是z对应的单位圆上的相同点。
- 点
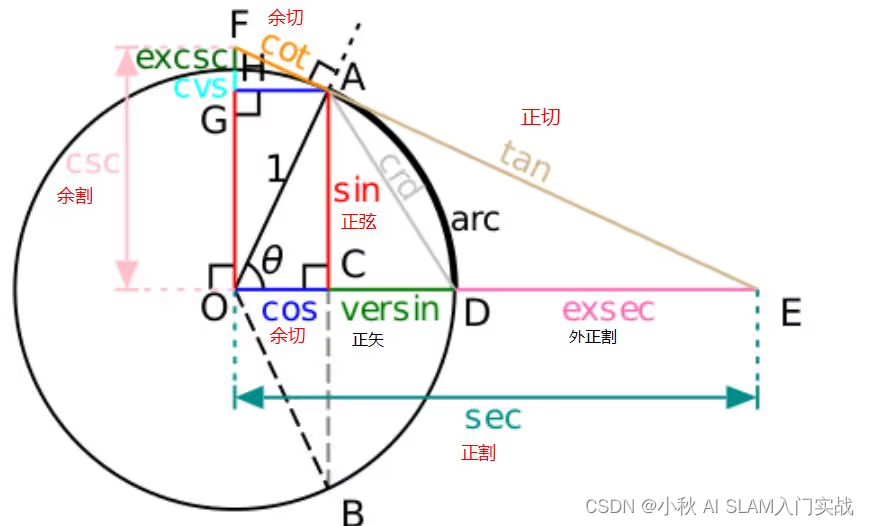
atan2的作用:atan2函数计算从正X轴到点(x, y)的逆时针角度。当使用(cos(z), sin(z))作为输入时,它实际上是在计算从正X轴到单位圆上z角度对应的点的角度。- 因此,
atan2(sin(z), cos(z))返回的就是z对应的角度,但被归一化到了-π到π的范围内。
为什么归一化后的角度等于原始角度?
- 假设
z已经在-π到π的范围内,则atan2(sin(z), cos(z))直接返回z。 - 如果
z不在这个范围内,比如z = π + δ(其中δ是一个小于π的正数),那么sin(z)和cos(z)的值将与sin(π + δ)和cos(π + δ)相同,即sin(δ)和-cos(δ)。在这种情况下,atan2将计算出-π + δ,这是π + δ的归一化值。
总结来说,atan2(sin(z), cos(z)) 之所以能够正确归一化角度,是因为它结合了三角函数的周期性和 atan2 函数计算点在单位圆上角度的能力,从而能够将任意角度 z 映射到 -π 到 π 的标准
范围内。这种方法不仅适用于将角度归一化到一个标准范围,而且确保了原始角度的方向和大小在单位圆上得到正确的表示和计算。
文章来源:https://blog.csdn.net/qq_21950671/article/details/135620720
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Linux启动流程
- 阿里云对象存储(OSS)服务
- 基于 NFS 的文件共享实现
- django之drf框架(排序、过滤、分页、异常处理)
- Gartner2023数据库魔力象限发布 阿里云依旧领导者 腾讯退出 EDB/Yugabyte进入
- 15 责任链模式
- 掌握numpy.einsum与torch.einsum:提升科学计算与深度学习中的运算效率和代码可读性
- JS冒泡排序
- 代码随想录算法训练营Day12 | 102.二叉树的层序遍历、226.翻转二叉树、101.对称二叉树
- 代码随想录算法训练DAY25|回溯2