PWM实现蜂鸣器
发布时间:2023年12月20日
tim4.h
#ifndef __TIM4_H__
#define __TIM4_H__
#include "stm32mp1xx_rcc.h"
#include "stm32mp1xx_gpio.h"
#include "stm32mp1xx_tim.h"
void timer4_init();
#endiftim4.c
#include "tim4.h"
void timer4_init()
{
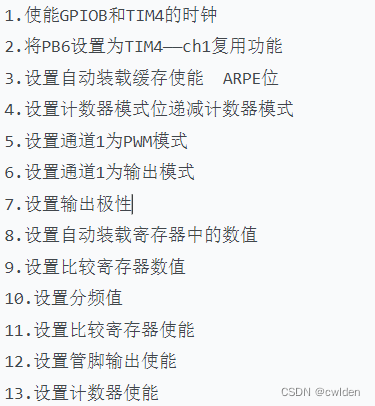
// 1. 设置GPIOB,TIM4的时钟使能 RCC_MP_AHB4ENSETR RCC_MP_APB1ENSETR
RCC->MP_AHB4ENSETR |= (0x1 << 1);
RCC->MP_APB1ENSETR |= (0x1 << 2);
// 2. 设置PB6引脚为复用功能 GPIOB_MODER
GPIOB->MODER &= (~(0x3 << 12));
GPIOB->MODER |= (0x2 << 12);
// 3. 设置PB6引脚为TIM4_CH1功能 GPIOB_AFRL
GPIOB->AFRL &= (~(0xF << 24));
GPIOB->AFRL |= (0x2 << 24);
// 4. 设置预分频寄存器,TIM4_PSC[15:0] CK_PSC = 209MHz
// 提供给TIM4的时钟源的频率是209MHz
TIM4->PSC = 20900-1;
// 5. 设置PWM方波的最终的周期 TIM4_ARR[15:0] 自动装载寄存器
// 得到一个1000-2000Hz的方波
TIM4->ARR =10000;
// 5. 设置PWM方波的占空比 TIM4_CCR1[15:0] 比较寄存器
TIM4->CCR1 = 7000;
// 6. 设置TIM4_CH1通道为PWM1模式
// TIM4_CCMR1[16] TIM4_CCMR1[6:4] pwm模式1 = 0b0110
TIM4->CCMR1 &= (~(0x1 << 16));
TIM4->CCMR1 &= (~(0x7 << 4));
TIM4->CCMR1 |= (0x6 << 4);
// 7. 设置TIM4_CH1通道使能TIMx_CCR1预加载使能寄存器 比较寄存器使能
// TIM4_CCMR1[3] = 0x1
TIM4->CCMR1 |= (0x1 << 3);
// 8. 设置TIM4_CH1通道输出PWM方波的极性,
// TIM_CCER[3] = 0b0 TIM4_CCER[1] = 0x1 or 0x0
TIM4->CCER &= (~(0x1 << 3));
TIM4->CCER |= (0x1 << 1);
//TIM4->CCER &= (~(0x1 << 1));
// 9. 设置TIM4_CH1通道的输出使能位,输出PWM方波
// TIM4_CCER[0] = 0x1
TIM4->CCER |= (0x1 << 0);
// 10. 设置TIM4_CH1通道的预装载寄存器的缓冲区的使能
// TIM4_CR1[7] = 0x1
TIM4->CR1 |= (0x1 << 7);
// 11. 设置定时器的计数方式,边沿对齐
// TIM4_CR1[6:5] = 0x0
TIM4->CR1 &= (~(0x3 << 5));
// 12 设置定时器计数的方向,采用递减计数/递增计数
// TIM4_CR1[4] = 0x1
TIM4->CR1 |= (0x1 << 4);
// 13. 使能TIM4_CH1计数器
// TIM4_CR1[0] = 0x1
TIM4->CR1 |= (0x1 << 0);
}main.c
#include "tim4.h"
void delay(int ms)
{
int i,j;
for(i=0;i<ms;i++)
{
for(j=0;j<2000;j++);
}
}
int num[10] = {0xFC,0x60,0xDA,0xF2,0x66,0xB6,0x3E,0xE0,0xFE,0xF6};
int main()
{
timer4_init();
while(1)
{
}//保证程序不结束
return 0;
}
文章来源:https://blog.csdn.net/m0_67896905/article/details/135021143
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Pytorch从零开始实战14
- OSPF的DR与BDR-新版(16)
- C++程序设计语言-郑莉 第四章实验报告
- 【AI应用】在VSCode中集成AI编程 ------CodeGeeX智能编程助手
- uni-app发版及分包要求
- Spring Cloud Gateway网关中各个过滤器的作用与介绍
- 用自制编程语言写自制操作系统(二)在空无一人的赛道里狂奔
- 【设计模式--行为型--策略模式】
- Vue与后端交互、生命周期
- 华为OD机试 - 最小矩阵宽度(Java & JS & Python & C)