TMC4671---Dedicated Motion Controller for 2-/3-Phase PMSM
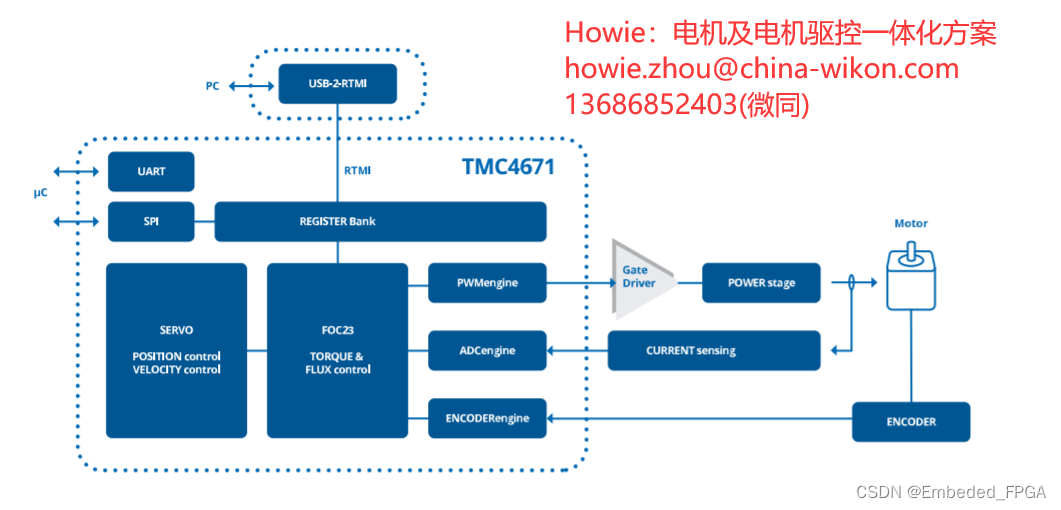
The TMC4671 is a fully integrated servo controller, providing Field Oriented Control for BLDC/PMSM and 2-phase Stepper Motors as well as DC motors and voice coils. All control functions are implemented in hardware. Integrated ADCs, position sensor interfaces, position interpolators, enablea fully functional servo controller for a wide range of servo applications.
Features
? Servo Controller
w/ Field Oriented Control (FOC)
? Torque Control (FOC),
Velocity Control, Position Control
? Integrated ADCs, ?Σ-ADC Frontend
? Encoder Engine: Hall analog/digital,
Encoder analog/digital
? Supports 3-Phase PMSM/BLDC,
2-Phase Stepper Motors,
and 1-Phase DC Motors
? Fast PWM Engine (25kHz … 100kHz)
? Application SPI + Debug (UART, SPI)
? Step-Direction Interface (S/D)
Applications
? Robotics
? Pick and Place Machines
? Factory Automation
? E-Mobility
? Pumps
? Laboratory Automation
? Blowers
Functional Summary
? Servo Controller with Field Oriented Control (FOC)
– Torque (and flux) control mode
– Velocity control mode
– Position control mode
? Control Functions/PI Controllers
– Programmable clipping of inputs and outputs of interim results
– Integrator windup protection for all controllers
– Status output with programmable mask for internal status signal selection
? Supported Motor Types
– FOC3 : 3-phase permanent magnet synchronous motors (PMSM) / brushless DC motor (BLDC)
– FOC2 : 2-phase stepper motors
– FOC1 : 1-phase brushed DC motors, or linear voice coil motors
? ADC Engine with Offset Correction and Scaling
– Integrated Delta Sigma ADCs for current sense voltage, supply voltage, analog encoder, AGPIs
– Interface for isolated external current sensing Delta Sigma modulators
? Position Feedback
– Open loop position generator (programmable [rpm], [rpm/s]) for initial setup
– Digital incremental encoder (ABN resp. ABZ, up to 2 MHz)
– Secondary digital incremental encoder
– Digital Hall sensor interface (H1, H2, H3 resp. H_U, H_V, H_W) with interim position interpolation
– Analog encoder/analog Hall sensor interface (SinCos (0°, 90°) or 0°, 120°, 240°)
– Position target, velocity and target torque filters (Biquad)
– multi-turn position counter (32-bit)
? PWM Engine Including SVPWM
– Programmable PWM frequency within the range of 25 kHz … 100 kHz
– PWM auto scaling for transparent change of PWM frequency during motion
– Programmable Brake-Before-Make (BBM) times (0 ns … 2.5 μs) for digital gate control signals
– Single bit SVPWM control (on/off) for Space Vector Modulation (switchable during operation)
? SPI Application Communication Interface
– 40 bit datagram length (1 ReadWrite bit + 7 address bits + 32 data bits)
– Immediate SPI read response (register read access by single datagram)
– SPI clock frequency fSCK up to 2 MHz (8 MHz write, 8 MHz read w/ 500 ns pause after address)
? TRINAMIC Real Time Monitoring Interface
– High frequency sampling of real-time data via TRINAMIC’s real-time monitoring system
– Only single 10 pin high density connector on PCB needed
– Enables frequency response identification and auto tuning options with TRINAMIC’s IDE
? UART Debug Interface
– Three pin (GND, RxD, TxD) 3.3 V UART interface (1N8; 9600 (default), 115200, 921600, 3M bps)
– Available as port for external position sensors (e.g. absolute encoder together with processor)
– Transparent register access parallel to embedded user application interface (SPI)
? Supply Voltages
– 5V and 3.3V; VCC_CORE is internally generated
? IO Voltage
– 3.3V for all digital IOs (choosable by VCCIO Supply)
– 5V common mode analog input voltage range (1.25V … 2.5V differential operating range)
? Clock Frequency
– 25 MHz (from external oscillator)
? Packages
– QFN76
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【Java集合篇】为什么HashMap的Cap是2^n,如何保证?
- 信号量机制理论详解专题
- @装备制造供应商,2024年的行业销冠已诞生!
- ChatGPT到底能做什么呢?
- 安卓.apk的文件app应用程序开发后如何安装运行到真机上测试?
- 北斗探空业务无线电频率获批,进一步为气象探空提供强大技术支持
- Flutter:跨平台移动应用开发的未来
- Pipeline 助您轻松驾驭海量数据!
- 软件测试之配置管理
- 晨控CK-FR03-EC与欧姆龙NX系列EtherCAT通讯连接说明手册