【视觉SLAM十四讲学习笔记】第四讲——指数映射
专栏系列文章如下:
【视觉SLAM十四讲学习笔记】第一讲——SLAM介绍
【视觉SLAM十四讲学习笔记】第二讲——初识SLAM
【视觉SLAM十四讲学习笔记】第三讲——旋转矩阵
【视觉SLAM十四讲学习笔记】第三讲——旋转向量和欧拉角
【视觉SLAM十四讲学习笔记】第三讲——四元数
【视觉SLAM十四讲学习笔记】第三讲——Eigen库
【视觉SLAM十四讲学习笔记】第四讲——李群与李代数基础
现在来到第二个问题:如何计算exp(φ^)?
指数映射
SO(3)上的指数映射
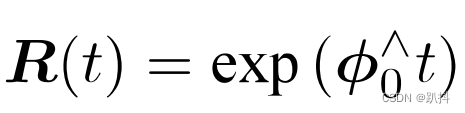
前一篇文章提到:上式前提是R在原点附近的一阶泰勒展开,我们看到这个向量φ=(φ1,φ2,φ3)反应了R的导数性质,故称它在SO(3)上的原点 φ_0 附近的正切空间上。这个φ正是李群大SO(3)对应的李代数小so(3)。换言之,李代数小so(3)是三维向量φ的集合,每个向量φ_i的反对称矩阵都可以表达李群(SO(3))上旋转矩阵R的导数,而R和φ是一个指数映射关系。也就是说,李群空间的任意一个旋转矩阵R都可以用李代数空间的一个向量的反对称矩阵指数来近似。用旋转矩阵表示的话就是李群空间。而用向量的反对称矩阵表示的话就是李代数空间,这两个空间建立了联系。
话说回来:任意矩阵的指数映射可以写成一个泰勒展开,但是只有在收敛的情况下才会有结果,其结果仍是一个矩阵:

同样地,对so(3)中的任意元素φ,我们也可按照此方式定义它的指数映射:

设三维向量 φ = θa,a是一个长度为1的方向向量,θ是向量的方向。通过运用泰勒展开以及反对称矩阵的性质,我们可以得到如下结果(推导过程省略):

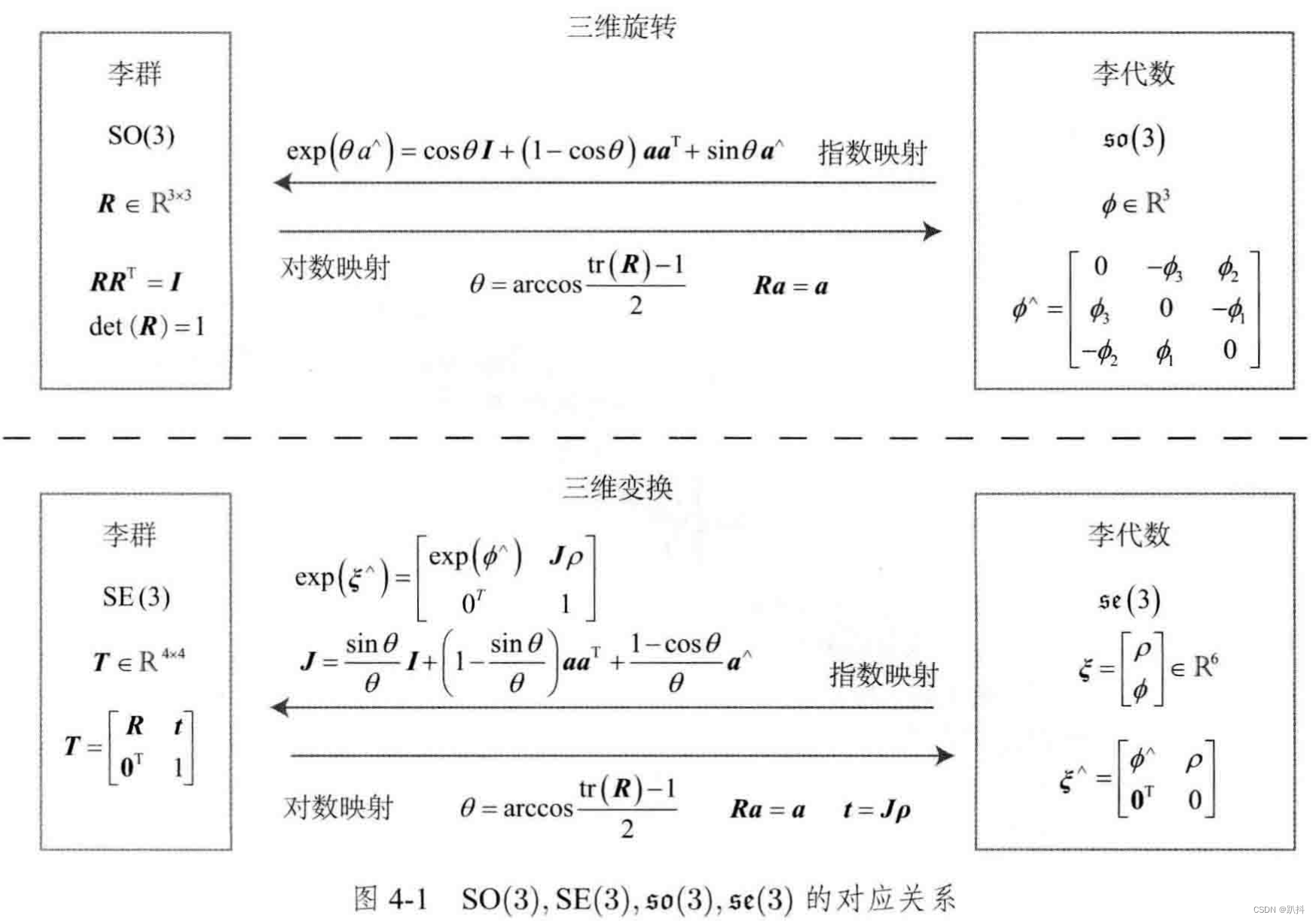
这条式子和罗德里格斯公式一模一样。这表明:so(3)的李代数空间就是由旋转向量组成的的空间,其物体意义就是旋转向量,而指数映射即罗德里格斯公式。罗德里格斯公式是表示从旋转向量到旋转矩阵的转换过程。通过它们,我们把so(3)中任意一个向量对应到了一个位于SO(3)中的旋转矩阵。反之,如果定义对数映射,也能把SO(3)中的元素对应到so(3)中:
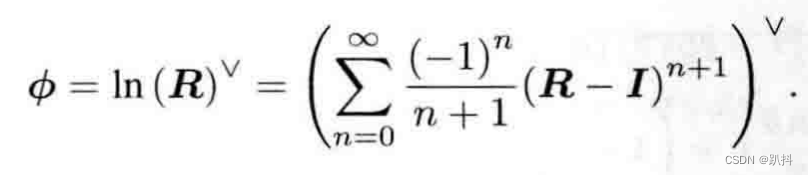
话说回来,是否对于任意的R都能找到一个唯一的φ?很遗憾,指数映射只是一个满射而非单射。这意味着每个SO(3)中的元素,都可以找到一个so(3)的元素与之对应;但是可能存在多一个so(3)中的元素,对应到同一个SO(3)。至少对于旋转角θ,我们知道多转360°和没有转是一样的——它具有周期性。但是如果把旋转角度固定在±π之间,那么李群和李代数元素是一一对应的。
SE(3)上的指数映射
se(3)上的指数映射形式如下:
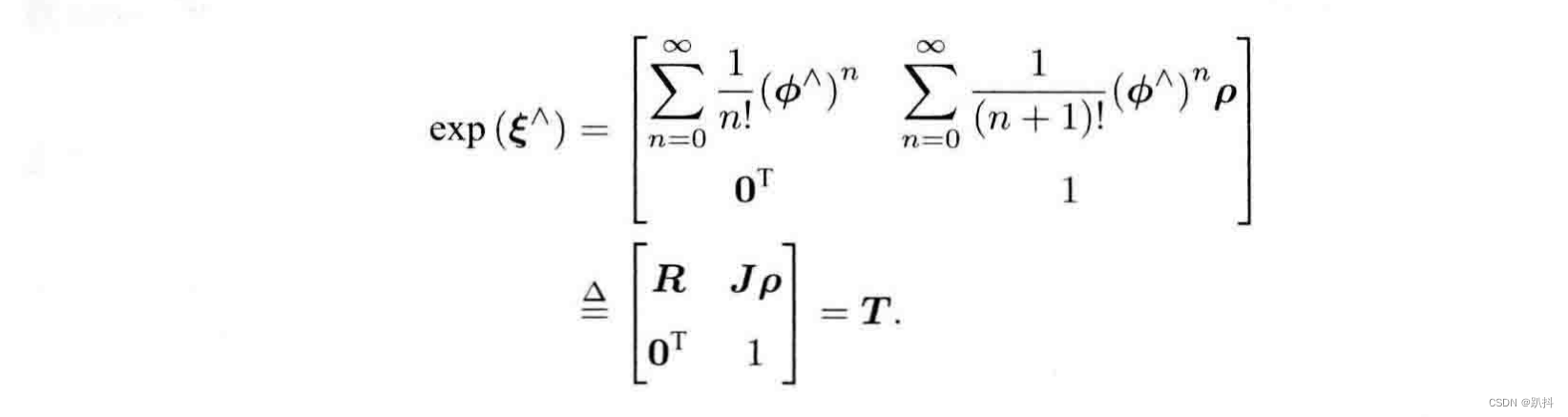
把exp进行泰勒展开推导此式,令φ = θa,其中a为单位向量,则
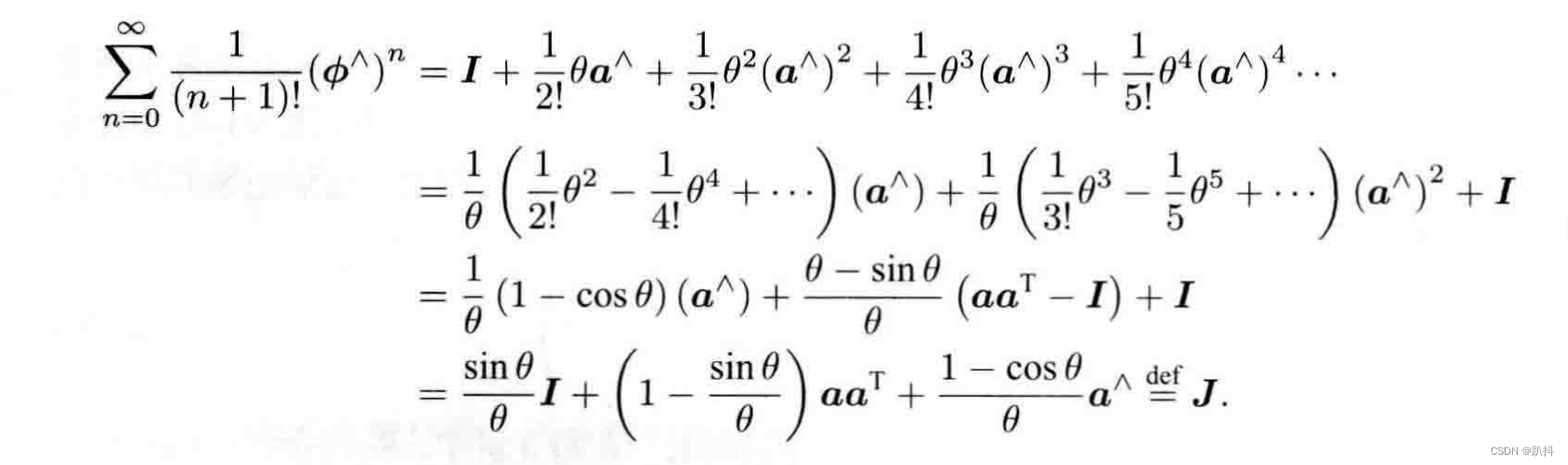
从结果上来看,ξ的指数映射左上角的R是我们熟知的SO(3)中的元素,与se(3)中的旋转部分φ。而右上角的J由上面的推导给出:

该式与罗德里格斯公式有点相似,但不完全一样。我们看到,平移部分经过指数映射之后,发生了一次以J为系数矩阵的线性变换。
总结
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!