Wheeltec小车的开发实录(1)
sudo mount -t nfs 192.168.58.101:/home/wheeltec/wheeltec_robot /mnt
报错
mount: /mnt: bad option; for several filesystems (e.g. nfs, cifs) you might need a /sbin/mount.<type> helper program.
解决办法
主机和从机都要安装 nfs-utils
安装nfs-utils
??? sudo apt-get install nfs-utils
??? 正在读取软件包列表... 完成
??? 正在分析软件包的依赖关系树????? ?
??? 正在读取状态信息... 完成????? ?
??? E: 无法定位软件包 nfs-utils
再安装nfs-common
??? sudo apt-get install nfs-common
??? 正在读取软件包列表... 完成
??? 正在分析软件包的依赖关系树????? ?
??? 正在读取状态信息... 完成????? ?
??? nfs-common 已经是最新版 (1:1.2.8-9ubuntu12.3)。
??? 下列软件包是自动安装的并且现在不需要了:
????? libsvncpp3 libwxbase3.0-0v5 libwxgtk3.0-0v5
??? 使用'sudo apt autoremove'来卸载它(它们)。
??? 升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。
再次执行,最终成功
roslaunch 无法补全
wget http://fishros.com/install -O fishros&&. fishros
选择rosdep配置
依赖报错
OpenCV——bridge报错
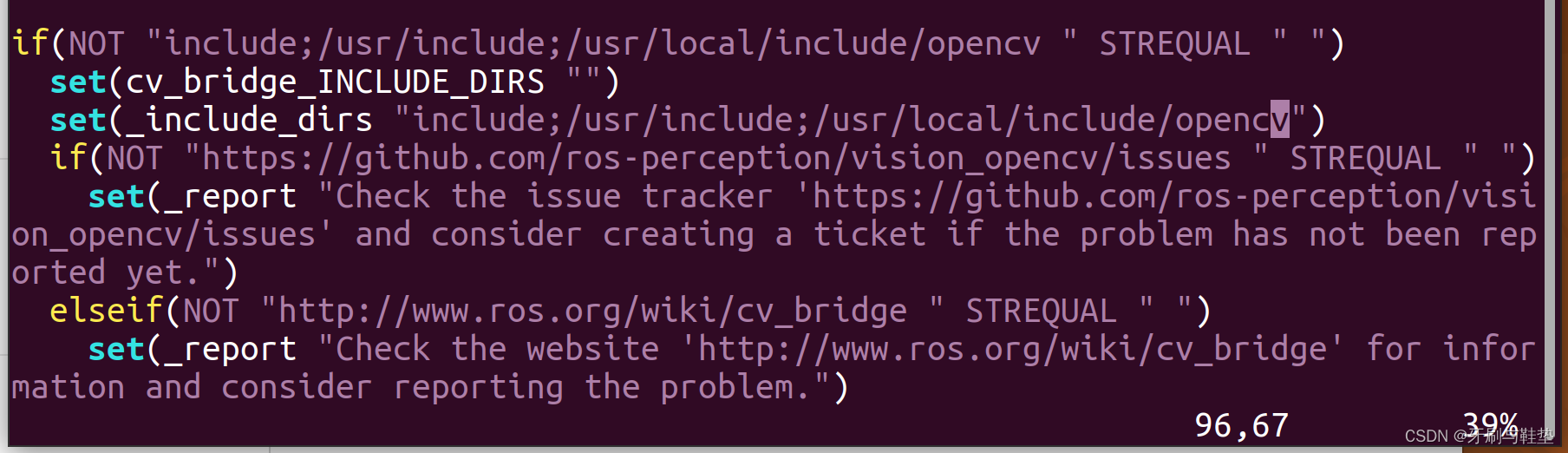
CMake Error at /opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake:113 (message):
Project 'cv_bridge' specifies '/usr/include/opencv' as an include dir,
which is not found. It does neither exist as an absolute directory nor in
'${{prefix}}//usr/include/opencv'. Check the issue tracker
'https://github.com/ros-perception/vision_opencv/issues' and consider
creating a ticket if the problem has not been reported yet.sudo vim /opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake
找到第96行



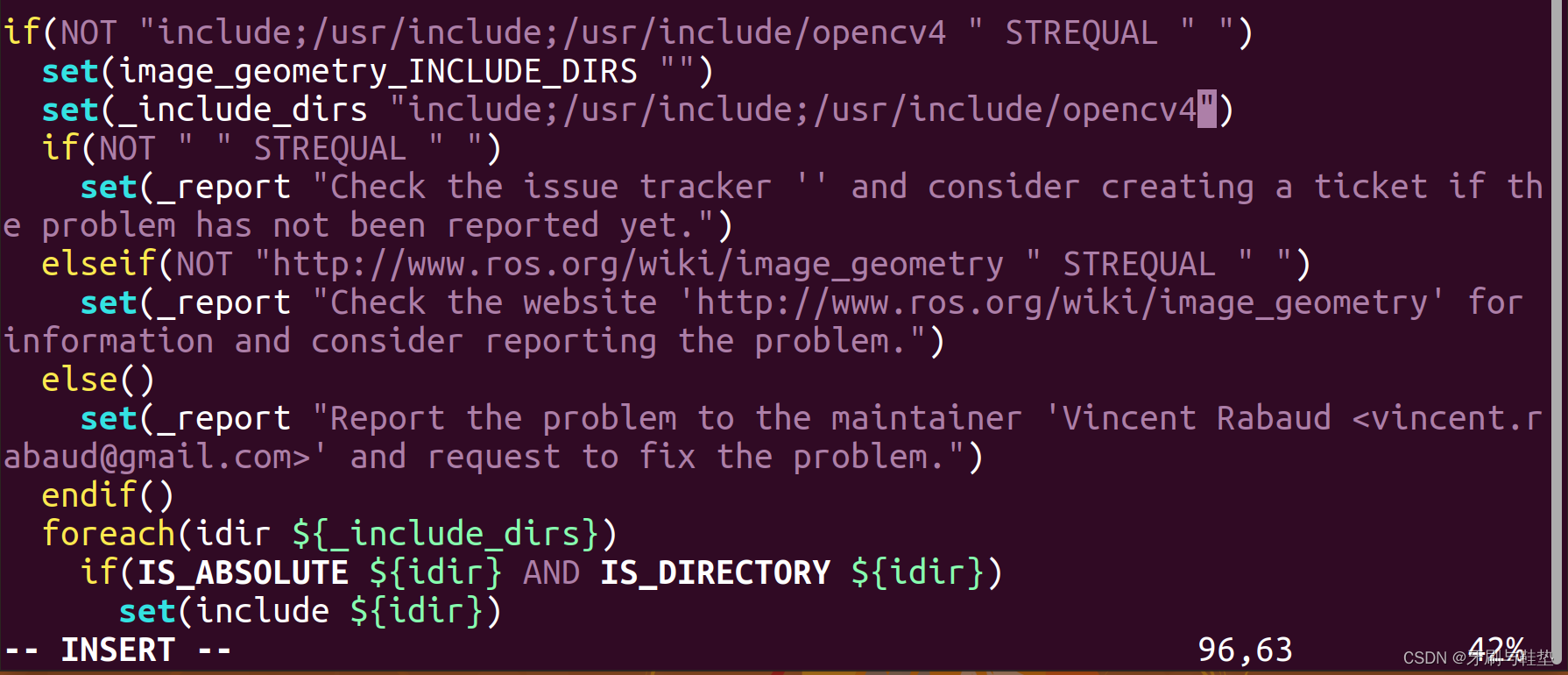
之所以改成这样是因为我的opencv是OpenCV4的版本
自然也会有其他类似的错误(按照它给出的提示更该对应目录下的内容为opencn4)

sudo vim /opt/ros/melodic/share/image_geometry/cmake/image_geometryConfig.cmake
修改成下面这样,也是对应的95和96行
 ?sudo vim /opt/ros/melodic/share/image_geometry/cmake/image_geometryConfig.cmake
?sudo vim /opt/ros/melodic/share/image_geometry/cmake/image_geometryConfig.cmake
opencv 可以多版本兼容所以可以多安装一个opencv3.X的版本
Ubuntu下OpenCV3.4.16的安装及使用-CSDN博客
真的好慢
编译功能包出错
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):-CSDN博客
根据这个我发现我处理需要安装上一个博主的 rmoveit-core、tf2-sensor-msgs、move_base_msg
?
sudo apt-get install ros-melodic-tf2-sensor-msgs
sudo apt-get install ros-melodic-moveit-core
sudo apt-get install ros-melodic-costmap-converter
sudo apt-get install ros-melodic-mbf-costmap-core
sudo apt-get install ros-melodic-mbf-msgs
sudo apt-get install ros-melodic-libg2o
sudo apt-get install ros-melodic-async-web-server-cpp
sudo apt-get install ros-melodic-joy*
sudo apt-get install ros-melodic-navigation
sudo apt-get install ros-melodic-costmap-converter
sudo apt-get install ros-melodic-serial
为了方便最好可以使用下面的代码代替上面的那些
sudo apt-get install ros-melodic-tf2-sensor-msgs ros-melodic-moveit-core ros-melodic-costmap-converter ros-melodic-mbf-costmap-core ros-melodic-mbf-msgs ros-melodic-libg2o ros-melodic-async-web-server-cpp ros-melodic-joy* ros-melodic-navigation ros-melodic-costmap-converteruuid_msgs这个包需要用另外一种方式解决
ROS编译遇到的【bug】Could not find a package configuration file provided by “uuid_msgs“-CSDN博客
下载延时的话,就在主机上下载好,然后用scp命令传输到小车上,就是这样需要解压和重命名
libuv的安装则需要
ROS编译遇到的【bug】Could not find a package configuration file provided by “libuvc“-CSDN博客?serial的安装则需要Could not find a package configuration file provided by “serial“ with any serialConfig.cmake-CSDN博客
其他很多错误可以在这个链接中找到
和
过程中的错误
/usr/include/opencv4/opencv2/core/cvdef.h:690:4: error: #error "OpenCV 4.x+ requires enabled C++11 support"
?#? error "OpenCV 4.x+ requires enabled C++11 support"
这是因为opencv4需要c++11的版本才能用所以从这一步开始需要执行以下命令编译
catkin_make -j4 -std=c++11?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 大图热控授权世强硬创代理,液冷板产品可解决超高热流密度散热难题
- 亚马逊实时 AI 编程助手 CodeWhisperer使用体验
- 构建基于RHEL9系列(CentOS9,AlmaLinux9,RockyLinux9等)的Nginx1.24.0的RPM包
- OpenCV入门04:调整图像对比度和亮度
- Oracle与Java JDBC数据类型对照
- 修改idea或者pycharm或者android studio的快捷键,快速跳转到行尾
- 西门子S7协议参考网站
- 01-C++基础
- “华为杯“第十三届中国研究生数学建模竞赛-A题:关于跳台跳水体型系数设置的建模分析(续)
- 69.x 的平方根