地表未爆子弹药检测与识别定位技术研究综述
源自:航空兵器
作者:陈栋, 闫小伟, 石胜斌
“人工智能技术与咨询”? ?发布
摘 要
现代战争中,具有侦察、识别、打击、评估多种功能于一体的远程多用途子母弹被广泛应用,随之将在地表产生大量的未爆子弹药,对战场机动、疏散展开及纵深攻击等作战行动产生极大的阻碍作用。地表未爆子弹药因其特殊的可视特性,利用成像技术和深度学习技术进行远距离、大面积、无接触式快速准确检测与识别,在军事上具有重要的应用价值。论文介绍了未爆子弹药检测常用方法及优缺点,概述了未爆子弹药在不同成像技术条件下的成像特点及其识别定位方法,分析了深度学习在未爆子弹药检测与识别领域的显著优势,并提出一种基于深度学习的无人机载式地表未爆子弹药快速检测与识别定位方法。
关键词
未爆弹药,?深度学习,?成像技术,?识别定位
引 言
对落弹区产生的未爆弹药识别与定位方式多采用人工搜寻, 受作业人员训练水平、 心理因素和作业环境等影响较大。作业人员需要穿戴头盔、 防弹衣等厚重的防护性装备, 进行地毯式搜索, 工作量较大, 搜寻要求高, 且具有较高的风险性。由于靶场附近居住的平民对未爆弹药的类型形状及其危险性不了解, 未爆弹药排除不彻底出现平民误拾、 误操作导致被炸身亡的事故案例屡见不鲜。根据国际禁止地雷运动(ICBL)发布的年度报告《2022年地雷监测》指出, 2021年至少有5 544人因地雷或其他战争遗留下的未爆弹造成受伤或死亡, 大多数为平民, 其中一半是儿童。因此, 迫切需要研制安全、 高效的未爆弹药识别与定位设备, 以提高作业人员效率和降低人工搜寻未爆弹药的危险性, 确保部队作业人员和人民群众的生命财产安全。
1 未爆弹药的定义及分类
1.1???未爆弹药的定义
未爆弹药(Unexploded Ordnance, UXO)是指在实施各种军事活动过程中采用投掷、 发射、 布设等方式遗留在自然环境中没有发生爆炸的炸弹、 地雷、 炮弹、 导弹等武器装备, 如图1所示。这些武器遍布于世界上参与各种战争和武装冲突的大多数国家和地区的领土上, 在和平时期, 各国军队在组织实施军事演习、 实弹训练或武器装备研发试验中也会产生各种类型不同性能的未爆弹药, 由于这些弹药中仍有爆炸性物质存在, 且因为有良好的外壳保护极有可能没有失效, 仍具有爆炸的可能性, 危险系数极高, 因此对部队基地化训练、 演习试验和人民生命安全产生了极大的安全隐患。

图1???俄乌冲突中乌克兰战场上的未爆弹
子弹药是子母弹中用以杀伤有生力量、 毁伤装甲目标、 布设地雷等完成毁伤目标或其他战斗任务的主体部分。根据其尾翼结构及用途不同可以分为刚性尾翼子弹和柔性尾翼子弹两种类型, 其中柔性尾翼子弹又可细分为降落伞尾翼子弹和飘带尾翼子弹。降落伞尾翼子弹主要由战斗部、 引信、 稳定装置等部件组成, 当子母弹飞到目标上空时, 引信按装定的时间发火, 点燃抛射药, 依靠抛射药气体的压力打开弹底, 抛出子弹弹体, 子弹在飞行的过程中稳定装置被打开, 使子弹按照预设的姿态稳定地飞向目标, 在引信的作用下引爆战斗部[1]。
未爆子弹药是未爆弹药的一种, 属于集束弹药中的子弹药。集束弹药是一种以战斗部壳体为母弹, 壳体内部装有两个及以上的子弹, 到达目标上空后母弹爆炸抛出子弹, 以击毁或杀伤集群目标的常规弹药。由于子母弹的特殊结构和用途, 在使用过程中其未爆炸率较高。美国是世界上使用子母弹较多的国家之一, 2000年美国的一项研究发现, 平均14%的子弹药没有爆炸, 2018年以后受《特定常规武器公约》约束才有所改善[2]。虽然国际上已经对集束弹药的子弹引信发火率提出了高于99%的要求, 但是对于一枚装有几千枚子弹的集束弹药, 1%的未爆弹率仍可能产生大量的未爆弹药, 极易造成人员伤亡。尤其是一些长时间锈蚀可能造成可靠性降低、 性能不稳定的未爆子弹药, 在检测、 识别、 挖掘、 转运、 销毁等过程中如果操作不规范, 可能会造成重大的安全事故, 甚至会造成严重的负面影响。
1.2???未爆弹药的分类
未爆弹药的分类方式主要依据一般弹药的类型进行分类, 因弹药作用方式、 作战目的及其搭载平台的不同出现了多种多样的类型, 因此未爆弹药的分类也众说纷纭。这里介绍两种比较常见的分类方式: 根据未爆弹药的投射形式不同可分为空投式、 发射式、 投掷式和布设式四种类型。空投式未爆弹是指从飞机或其他航空器上以散布或投放的方式发射出来但未爆炸的弹药, 包括航空炸弹、 子母弹和子弹药三类[3]; 发射式未爆弹是指从枪、 炮或某种发射器等武器的身管发射出来但未爆炸的弹药, 主要类型有炮弹、 迫击炮弹、 火箭弹、 导弹、 枪榴弹等; 投掷式未爆弹是指由作战人员通过扔、 投、 掷等方法使其发出但未爆炸的弹药, 主要包括手榴弹、 手雷等; 布设式未爆弹是指通过战场布设的方式设置但未爆炸的弹药, 一般包括地雷、 水雷和爆炸装置等。根据未爆弹药所处的环境状态不同可分为地表未爆弹、 地下未爆弹及水下未爆弹。地表未爆子弹药是地表未爆弹药的一种, 主要特点是因带有伞降结构, 在战斗部飞越过弹道顶点后在伞降结构的作用下缓慢降落, 落在地面上未发生爆炸而暴露在地球表面。?表1为常见未爆弹分类。
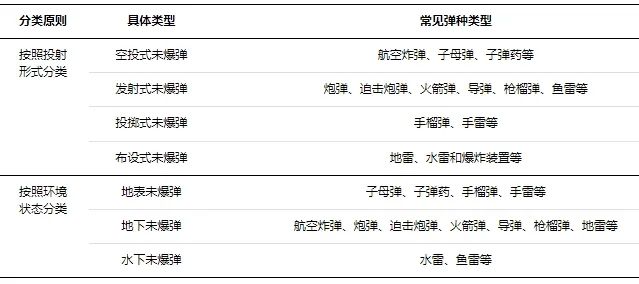
表1???常见未爆弹分类表
2 地表未爆子弹药快速检测与识别定位技术研究现状
2.1??地表未爆子弹药检测技术
随着航空炸弹、 子母弹、 末敏弹等形成未爆弹武器系统的发展, 结合最新技术成果, 地表未爆子弹药检测技术得到了相应的发展。随着布撒弹药在战场上的广泛应用, 1970年后各国普遍认识到研究可进行大面积快速检测的未爆子弹药技术的重要性, 伴随着计算机技术的发展应用, 基于计算机技术的智能型探测器普遍得到各国的青睐。根据检测方式的不同可将地表未爆弹药搜寻技术分为物理检测技术、 生物检测技术和智能检测技术。
2.1.1? ??物理检测技术
物理检测技术是指利用磁场作用、 电磁感应、 电磁波特性进行未爆弹药检测的技术, 主要有磁法检测技术、 电磁法检测技术、 探地雷达检测技术和红外检测技术。
(1)磁法检测技术。磁法检测是利用地磁场的作用, 铁磁性的外壳或零部件被磁化后产生感磁和剩磁, 反过来在局部影响地磁场, 致使实测地磁场与作为正常磁场的主磁场之间存在差异, 这种差异即是磁异常, 通过精确测量计算异常值可以找到目标存在的位置[4-5]。瞬变电磁检测原理[6]?如图2所示。采用磁法检测技术设计的检测设备称为磁力仪, 根据其工作原理不同, 可分为基于电磁感应原理的磁通门磁力仪、 基于核磁共振原理的质子磁力仪、 基于电子自旋共振原理的光泵磁力仪和基于超导量子干涉原理的超导磁力仪等。加拿大的Doll W E等人与美国橡树岭国家实验室(ORNL)合作开发的航空磁测系统, 当平台飞行高度为1~2 m时与地面磁测的检测效果接近, 但效率相较于地面磁测要高许多[7]。该方法效率高、 成本低、 检测深度大, 常用于检测地下或水中较深处的航空炸弹, 但对目标的空间分辨率低, 极易受到金属杂质的干扰, 虚警率高。
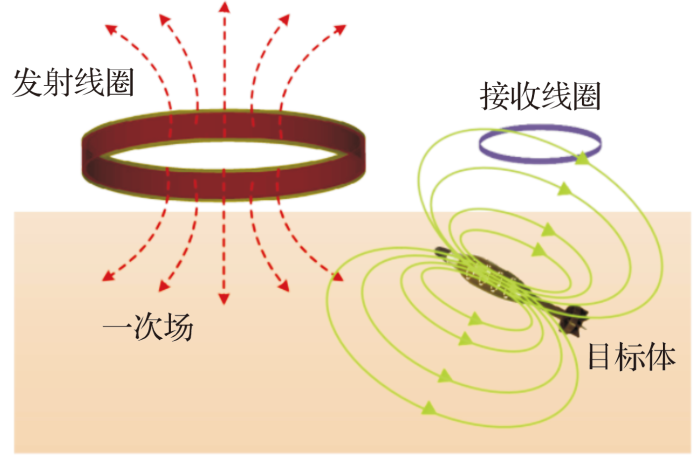
图2???瞬变电磁检测原理示意图[6]
(2) 电磁法检测技术。电磁法检测是利用金属外壳或零部件在检测器激励电磁场(一次场)的作用下产生涡流效应[8], 而形成二次场, 二次场随时间域存在衰减特性, 再利用特定的反演算法、 目标识别算法等获取目标的特征[9], 如图3所示。
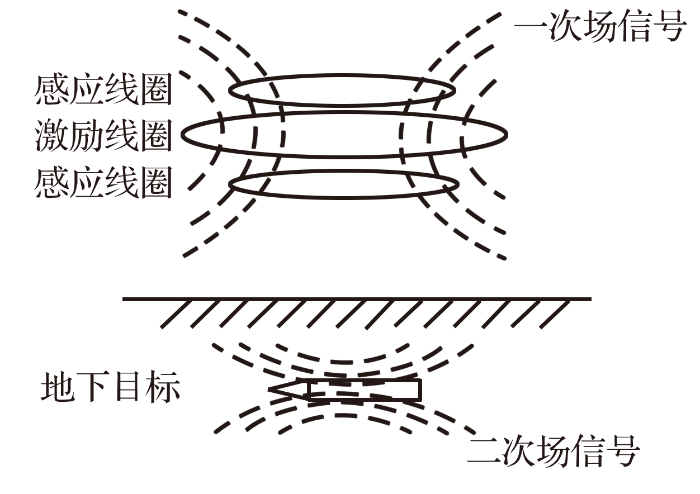
图3???电磁法检测原理示意图
电磁法检测技术可分为频域电磁检测法和时域电磁检测法。金属检测器多采用频域电磁检测法, 主要用于检测地下残存的地雷[4]。自20世纪末, 美国一些机构另辟蹊径, 开始研究时域电磁检测法, 得到了很好的效果。美国橡树岭国家实验室开发的ORAGS-TEM, 其以直升机平台作为载体, 该系统在飞离地面1~2 m, 可检测到口径为60 mm的照明弹和81 mm的迫击炮弹[10-11]。该方法具有较强的抗干扰能力, 且速度快、 可靠性高、 操作简便; 缺点是检测距离较小, 对数据算法要求较高。
(3) 雷达检测技术。雷达检测是用高频无线电波来确定介质内部物质分布规律的一种地理物理方法[12]。利用宽带电磁波以脉冲形式检测地下目标, 通过分析接收天线接收到的目标散射及反射后的电磁波, 而获得目标性质、 形状等特征, 如图4所示。美国劳伦斯国家实验室(LLNL)[13]、 日本东北大学的Sato M团队[14]使用该方法研制的检测设备在试验中取得了较好的效果。这种方法的优点是不但可以检测金属目标, 还可以检测非金属目标, 且检测精度高、 虚警率低; 缺点是受地质条件、 水分含量、 地表植被影响较大。
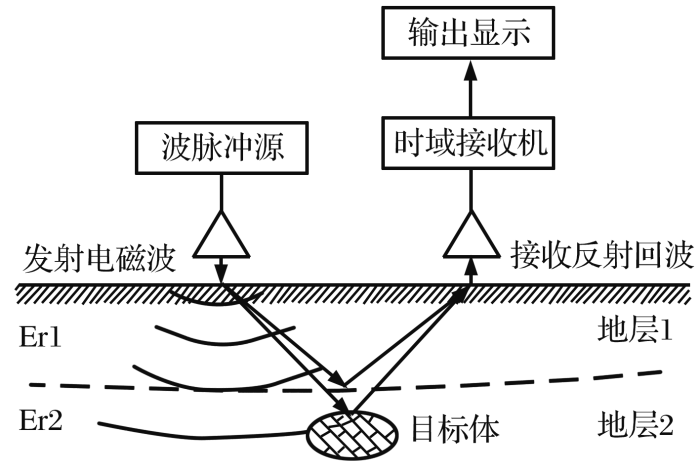
图4???雷达检测原理示意图[10]
(4) 红外检测技术。红外检测是利用目标与周围环境不断进行能量交换, 检测提取目标到达传感器的热辐射通量, 通过特定的算法计算分析目标的位置信息[15]。1947年, 高莱发明了一种利用气体的热胀冷缩原理制成的红外探测器, 也是世界上第一种实用的红外探测器(又称高莱管)。红外检测技术的发展分为三个阶段, 20世纪40年代至80年代为初级阶段, 由于第二次世界大战中飞机的广泛使用, 在红外检测、 拦截及告警等需求的牵引下, 相关理论及技术得到了快速发展, 主要特征是一维信号处理[16]; 20世纪80年代到21世纪初为中级阶段, 随着红外成像技术的应用, 各国看到了初级阶段红外检测的良好表现, 并且由于冷战军备竞争和其他军事上应用的迫切需求, 各军事强国迅速将红外成像基础技术研究成果应用于军用卫星、 飞机、 导弹等军事领域, 主要特征是进行二维和三维信号处理[17]; 21世纪初至今为高级阶段, 随着红外凝视成像检测技术的发展, 主动式激光雷达、 偏振红外检测雷达得到广泛应用, 主要特征是多维信号空间处理和多波段红外凝视检测[18]。该方法具有检测面积大、 速度快等优点; 缺点是对小目标识别准确率较低, 易受环境干扰。
2.1.2? ???生物检测技术
生物检测技术是指利用生物体的感观特性或其他生物反应变化进行未爆弹药检测的技术, 主要有动物检测技术、 植物检测技术和微生物检测技术等。
(1) 动物检测技术。动物检测是指利用动物灵敏的感观特性检测未爆弹药中炸药组成的技术。2018年以来, 荷兰动物检测咨询公司Schoon A团队使用4只经过训练的探雷犬, 在总面积1 400 000 m2的14个雷场上, 找到了290个疑似地点, 发现了213枚未爆炸物, 其正确检测率为73.4%[19]。这种方法的优点是使用探雷犬比人工扫雷速度更快, 可以在各种复杂条件下对炸药以及其他违禁物品进行检测, 除可靠性高、 流动性强外, 还可以对爆炸物源头进行追踪; 缺点是只能对经过训练的炸药成分进行检测, 故其检测的对象有限, 且对面积较大的目标群检测效率较低。
(2) 植物检测技术。植物检测是指利用植物在不同环境中的特殊反应而进行检测的技术。丹麦阿瑞莎生物技术公司在哥本哈根大学相关研究成果的基础上, 经过3年的不懈努力, 开发出一种转基因植物, 该植物的根部遇到二氧化氮时, 植物会从绿色变为红色, 以此来检测泥土中的二氧化氮成分, 从而判定未爆弹的位置[4]。这种检测方法的优点是检测面积大、 可靠性高; 缺点是检测周期较长。
(3) 微生物检测技术。微生物检测是指利用查找寄生在特定环境条件中的微生物而进行检测的技术。20世纪90年代, 美国经过数年的研究发现了一种适合在黑暗环境中生长, 能以爆炸物散发出来的浓烈气味为生, 同时在炸药环境中能够自然发光的细菌。这种检测方法的优点是安全性高、 成本低廉; 缺点是受细菌的生存环境影响, 仅限于夜暗条件下使用。
2.1.3? ???智能检测技术
20世纪末以来, 伴随着传感器技术、 计算机技术和人工智能的快速发展, 各军事强国纷纷开始研究并应用能自主检测、 识别、 定位、 跟踪和主动攻击目标的智能地雷, 它们具有在不同地域内进行远距离检测、 通信、 控制、 敌我识别、 自主攻击目标, 并具有根据雷场破坏情况进行自修复等功能[20-21]。研究地表未爆子弹药检测技术的科学家们把研究方向也转向了人工智能领域, 为传统检测技术插上了智能的翅膀, 形成了一些“人工智能+”模式的智能检测技术, 并取得了较好的效果。
由于人工智能在数据处理方面的优异表现, 其在检测技术上的应用主要集中在检测数据的分析处理阶段, 从大量的数据中找到目标的特征信息。刘慧等人[22]将激光雷达传感器所采集的目标航迹三维点云分布数据转化为一维目标航迹数据, 采用自适应滤波方法对一维目标航迹数据实施滤波处理, 获取影响激光雷达目标航迹识别结果的目标航迹属性特征, 设置所获取的目标航迹属性特征作为递归神经网络输入, 目标航迹识别结果作为递归神经网络输出, 实现激光雷达目标航迹识别, 具有较高的识别精度及适应能力; 张远鹏、 王宏伟等人[23-24]利用经典机器学习分类方法以及神经网络模型分别对金属目标物的磁感应和电磁感应数据特征进行研究, 较好地实现了对目标和干扰物的区分和识别, 具有较好的识别能力。但是该类方法受检测技术的局限性较大, 需要进行多次信息采集才能获得可用的目标特征信息, 对现有的数据不能较好地利用, 算法模型学习不充分, 特征提取较少, 目标识别实时性较差。
为了充分利用现有数据, 通过采用深度学习模型算法对已有目标数据进行反复学习强化, 提取目标特征信息形成模板, 再与目标进行匹配, 从而检测出目标的信息。程思远[25]提出了一种基于YOLOv3网络模型的深度学习算法, 以网络结构darknet53作为空对地的红外面目标进行特征提取器, 引入一种新的注意力机制——空间注意力, 训练网络模型, 完成对红外面目标的识别, 通过评价指标与仿真结果发现, 其可以满足空对地的红外面目标识别算法的高识别率、 实时性好的要求。李航、 邱凯、 高胡琨等人[26?-28]将卷积神经网络模型算法YOLOv3及其改进算法desenYOLOv3与可见光检测技术结合用于检测小目标, 减少了模型算法的参数量, 有效提高了整个模型的运算速度。该类方法充分利用现有数据, 提高了目标识别的实时性, 但是由于检测目标物信息获取较少, 存在目标识别精度较低的问题。
2.2? ???地表未爆子弹药识别定位技术
地表未爆子弹药的识别定位主要以数字图像为基础。当一幅图像的像素和该像素的灰度值都是有限的离散量时, 则该图像被称为数字图像。一般的数字图像是基于电磁波谱辐射得到的, 常见的是可见光图像和红外图像, 其主要利用可见光、 红外和偏振光等成像技术将目标的形状、 大小、 颜色等信息映射到显示介质上而获得的。
2.2.1? ??常见的地表未爆子弹药成像技术
(1) 可见光成像技术。可见光成像技术是根据光的反射和透镜成像原理, 从物体上反射的可见光可以在镜头的焦距平面上呈现物体图像的技术, 通过使用数字摄像机内的感光芯片将捕获的光信号转换为电信号, 再经过图像信号处理即可得到数字图像[29]。其特点是观察人员可以清晰地看到图像中未爆子弹药的形状轮廓及颜色信息(如图5所示), 并根据其所处背景情况分析出所处位置, 辨识速度快, 识别程度高, 但是当目标被树木或草丛等其他物体遮挡时或与背景物颜色相似时, 通过人眼很难识别出其物理特征, 更难以定位。

图5???未爆子弹药的可见光成像图像
(2)红外成像技术。红外成像技术是以接收景物自身各部分辐射的红外线来进行检测, 红外线波段如图6所示, 利用景物自身各部分辐射的差异获得图像的细节, 即把红外辐射图像转换为可视图像的技术[30]。其特点是由于未爆子弹药的金属外壳与环境背景对红外电磁波的反射率不同, 通过主动红外成像技术可以明显地将金属物与背景环境区分开(如图7所示), 且其不受天气影响, 可以透过云、 雨、 雪、 雾、 霾等遮蔽物, 但是由于同类金属对红外电磁波的反射率一样, 图像的形状与金属的尺寸息息相关, 难以分辨未爆子弹药的细节特征, 易受环境干扰而出现误识误判。
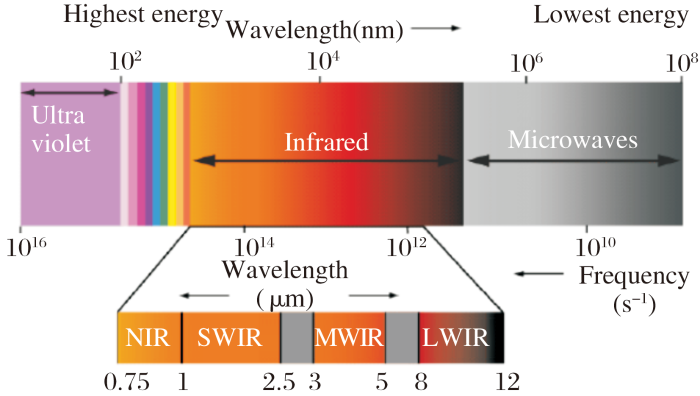
图6???红外波段光谱图[29]
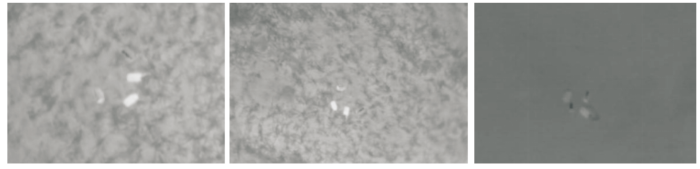
图7???未爆子弹药的红外成像图像
(3) 偏振成像技术。偏振成像技术是一种利用光波在空间中传播会出现偏振现象, 从不同偏振方向采集目标物体表面反射的光进行成像的技术。自然环境和人造物体的偏振特性具有明显差异, 因此可用偏振摄像机获取目标的反射、 辐射光的偏振态, 并利用偏振态之间的相互关系获取偏振度、 偏振角等信息, 可以提升探测信息的维度[31]。其特点是采用偏振光成像技术不但可以探测到未爆子弹药的形状轮廓及颜色等表征信息(见图8), 还可以获得相位、 强度、 光谱、 偏振等本征信息, 同时对大气、 雾霾和背景噪声等干扰信息具有抑制作用, 大大提高了未爆子弹药的识别精度, 但其系统结构比较复杂, 成像速率比较慢。

图8???晴天条件下未爆子弹药的偏振成像图像
2.2.2? ???地表未爆子弹药识别定位技术
(1) 基于物理特征提取的图像识别定位技术。物理特征, 特别是颜色、 形状等信息, 是生物辨识目标和背景最常用的方式, 因此物理特征信息的提取对于未爆子弹药的识别定位具有重要的作用。主要有三种定位方式:
a.根据颜色特征进行识别定位的技术。通过对图像中的每个像素位置矩阵化, 对像素的颜色信息进行数字化处理赋予灰度值, 根据灰度值的大小进行分割, 这里需要根据未爆子弹药的特征先设定一个临界灰度值, 即阈值, 超过阈值的部分设为前景, 低于阈值的部分设为背景, 从而可以将图像分割开来, 去除背景的干扰便可以一目了然地识别出未爆子弹药, 并根据其像素位置矩阵确定其位置。常用的阈值分割方法有迭代法[32]、 直方图法[33]和大津法[34]。
b.根据形状特征进行识别定位的技术。通过在数字图像中描绘出各种类物体的轮廓或形状, 并根据各个形状的不同查找与目标信息相似的全部或局部轮廓形状, 通过人工匹配识别出目标信息。常用的形状特征识别定位方法有边缘法、 形态学法、 区域生长法、 区域分离与聚合法等。
c.根据颜色、 形状等多特征融合进行识别定位的技术。利用单一的颜色或形状特征虽然可以从图像中分割出目标信息, 但是由于颜色特征受光照条件影响较大, 形状特征受背景物遮挡或图像处理时聚类生长干扰较大, 仅靠单一的特征可能难以准确识别定位出目标信息, 将两个或两个以上的特征融合起来进行识别, 能够极大地提高识别定位的精度。
(2) 基于算法的图像识别定位技术。随着计算机技术的不断发展, 工程师们开发出了一些对数字图像中的相关数据信息进行分类处理的算法, 再经过人工识别计算, 得出目标的位置信息。
a. KNN算法。KNN是根据“物以类聚”思想进行分类识别的算法, 其原理是利用样本集中的训练数据对特征空间进行有监督学习的划分, 而后计算预测数据与样本集不同特征值之间的距离, 距离越小, 代表他们之间的差别越小, 属于同一簇类的概率越大。常用的距离量度方式有闵可夫斯基距离、 欧式距离、 曼哈顿距离等。
b. K-means算法。K-means[35-36]是一种将一组数据划分为k种分类的算法。在给定样本A={a1,?a2, …,?am}时, K-means算法通过运算得到一个对数据A的划分B={b1,?b2, …,?bk}, 该划分使得式(1)尽可能小。
![]()
(1)
![]()
(2)
式(1)说明了相同簇的样本围绕簇中心的紧密程度, E值越小, 簇内样本越相似。式(2)是簇bi的聚类中心。
K-means算法通过迭代, 寻找式(1)最优的近似解。其步骤如下:
第一步: 计算每个样本点aj与所有聚类中心的距离:?
![]()
, 根据距离最近的聚类中心确定aj?的类别, 依次确定每个样本点的类别, 形成一种B;
第二步: 重新计算每个簇的聚类中心, 更新ui。重复进行第一步。当函数收敛或到达指定迭代次数时, 终止运算。
c. 分水岭算法。分水岭算法是用地形中的坐标值代表图像中的像素位置矩阵, 用高程值表示像素点的灰度值, 图像中的局部极小灰度值与其周边的灰度值形成了一个凹函数模型, 这个凹函数模型就形成了一个积水盆地。当积水盆地里的水不断上升时, 相邻的积水盆地之间会出现分水岭, 即两个积水盆地的边界, 从而实现不同性质目标的分割识别。
以上基于物理特征提取和算法的识别定位技术, 因其主要是利用图像信息进行目标识别定位, 需提前对图像进行预处理, 分割出前景与背景, 再进行人工识别判断, 这种方法虽然识别定位精度比较高, 但由于需要人在回路进行识别和计算, 因此识别定位的速度通常比较慢, 整个系统程序也较为复杂。
(3) 基于神经网络的图像识别定位技术。随着计算机技术和神经网络的不断发展, 工程师们开发出了一些对数字图像中的相关数据信息进行快速自主聚类分割和匹配识别的系统和算法, 不需要或仅需少量的人员参与, 便可以识别定位图像中的目标信息。
a. 两阶段神经网络。两阶段神经网络是指先对图像进行扫描筛选生成目标候选区域, 再与目标的像素信息进行匹配, 识别出目标信息。在2012年的Image Net的目标检测赛事[37]上, Hinton教授使用的基于深度学习的卷积神经网络目标检测性能突出, 技压群雄。此后, 谷歌团队提出的Inception V4[38]网络模型架构和微软团队提出的Res Net[39]网络框架因其在目标检测领域具有更加优越的准确率, 一度成为应用最火热的两种检测模型, 但是其分类速度及准确性仍然达不到人们的要求。2013年, Papageorgiou C, Dalal N等人提出了基于CNN[37]的深度学习模型Over Feat, 通过在最后一层的卷积层上做滑窗来实现对目标物体的定位与检测[40-41]。2014年, 伯克利大学的Girshick R等人在基于区域的卷积神经网络(Region-based Convolutional Network, R-CNN)[42]的目标检测论文中使用了Region Proposal[43]+CNN的算法框架, 使得基于深度学习的目标检测相对于传统方法在精度和速度上取得巨大突破。2015年, He K M等人继续对R-CNN进行优化, 提出了空间金字塔池化网络架构(Spatial Pyramid Pooling net, SPP-net)[44], 实现了任意图片尺寸的输入, 极大地缩短了对图片预处理的时间。2015年, Girshick R等人提出了R-CNN的加速版本Fast R-CNN[45], 实现了端到端的单级训练过程和多任务损失函数, 进一步提高了目标检测速度。2016年, 为了解决目标检测生成候选框[46]区域的时间瓶颈, Ren S Q等人提出了改进方案Faster R-CNN[47]构建了区域生成网络(Region Proposal Network, RPN), 替代传统生成候选框区域的选择性搜索(Selective Search, SS)[48]的方法, 加快了目标检测的速度, 但对于实时检测的要求还有差距。
b. 单阶段神经网络。为了解决实时性的问题, 科学家们将生成候选区域与像素信息匹配同时并联进行, 提出了单阶段神经网络。2016年, Redmon J和Liu W等人分别提出了YOLO(You Only Look Once)[49]和SSD(Single Shot Multi Box Detector)[50]模型, 其思想均为回归, 即在给定的输入图像上直接回归目标候选框和目标类别, 其检测速度比Faster R-CNN模型提高了10倍, 实现了实时的目标检测, 但是检测精度却有所降低。Fu C Y等人又提出了SSD的改进版本DSSD(Deconvolutional Single Shot Detector)[51], 其针对SSD存在的小目标检测不准确的问题, 利用Res Net网络和Deconvolution层, 增强了对于上下文信息的利用, 从而使其对小目标有了更好的检测性能。2017年Lin T Y等人提出了FPN(Feature Pyramid Networks)[52], 其将特征图进行金字塔式的提取和结合, 同时利用了底层特征图的特征高提取度和高层特征图的高语义信息, 提高了检测精度。随后Redmon J对YOLO进行改进, 去掉全连接层和采用多尺度训练策略[53], 引入K-means分类算法, 且对每一个卷积层加入归一化层(Batch Normalization)[54]等, 于2017年提出了第二代的YOLO版本YOLO 9000[55], 加快了收敛速度, 预测框的数量也由2个提高到5个, 既提高了YOLO检测速度, 也大大提高了检测精度; 2018年, 使用了更深层的新主干网络darknet53代替之前的darknet19, 并且引入FPN(Feature Pyramid Network)[52]结构将深层特征与浅层特征融合, 又提出了最新一代的YOLOv3[56], 预测框的数量也提高到9个, 再次提高了目标检测的精度上限。2020年, YOLOv4[57]网络问世, 相较于YOLOv3版本, 采用了CSP-Darknet53主干网络, 不仅改进了模型的训练方式及感受野, 同时还引入了注意力机制, 通过增加训练成本, 提高了检测效果[58], 使得YOLOv4整体性能都有所提升。YOLOv5版本也在这一年被研发出来, 其主要在输入端采用Mosaic数据增强和自适应锚框计算, 在CSP结构框架中融入Focus结构, 在预测端引入GIOU-LOSS损失函数, 使得模型更加轻量化, 同时也提高了检测速度和检测精度[59-60]。
总体来看, 两阶段神经网络与单阶段神经网络在时间发展上虽有先后(如图9所示), 但是在具体应用中却各有所长, 应根据各自特点选择相适应的算法。
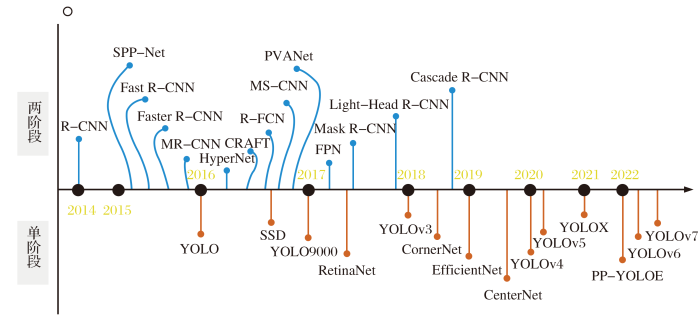
图9???基于深度学习目标识别算法的发展历程图[61]
地表未爆子弹药的识别是基于地表未爆子弹药的结构及所处的位置特性, 显而易见, 地表未爆子弹药相对于空中飞行的无人机具有明显的可视特征, 因此无人机搭载的成像设备在将其经过地域扫描成图像的同时, 也将未爆子弹药的相关信息载入其中, 位于地面的识别设备可以利用算法或神经网络系统对无人机传回的图像进行拼接、 连通、 匹配等处理, 快速识别出未爆子弹药的信息, 并根据其在图像中位置精确计算出其位置坐标。
3 地表未爆子弹药检测与识别定位技术发展
3.1? ??地表未爆子弹药检测技术未来发展方向
目前, 随着人工智能技术、 传感器技术和图像识别技术的不断发展, 地表未爆子弹药检测技术也有了很大的进步, 主要集中在以下3个方向:
一是传感器技术方向。随着人类对微机电机械系统、 非COMS纳米技术和量子技术等先进技术的不断研究应用, 使得地磁、 电磁或超声波等信息媒介的调制和解调更加精细、 快速和准确, 由此使得人类的感观能力极大地拓展, 更能满足人类对未知领域探索的需要, 未爆弹药的位置、 形状和材料等信息的探测与分析手段也将更加简便快捷。
二是图像识别技术方向。采用机器学习、 深度学习等人工智能技术, 对从空中或地面采集的图像进行自主地处理和分析, 并根据图像中的信息进行自主匹配, 实时识别目标信息并根据结果进行决策, 实现对未爆弹药的准确识别, 并帮助决策者制定详细的处理方案。
三是仿生学技术方向。通过仿生学理论, 将生物的演化过程与机械设计相结合, 利用仿生原理制作复眼, 同时具备蝇眼和鹰眼的功能, 不仅可以扩大探测视场的角度, 还可以根据目标的景深在一定距离范围内进行自主聚焦和放大, 实现精准识别和解析未爆子弹药的信息, 这种仿生学的技术在军事领域中具有重要的应用价值。
未来, 随着智能化弹药的发展和使用, 采用单一方式的“人工智能+”模式检测和识别定位技术的效益性和时敏性不能满足现代战场上快速攻防转换的要求, 紧跟人工智能和神经网络算法的不断迭代, 大数据使用和计算机计算能力的不断增强, 未来一段时间内基于深度学习的非接触式大面积快速检测和小范围精确识别定位技术综合运用是今后研究的热点方向。
3.2??基于区域搜寻的地表未爆子弹快速检测与定位技术
本文在综合上述研究的基础上, 提出了一种基于深度学习的无人机载式地表未爆子弹药快速检测与识别定位方法。其具体工作原理及过程如下:
使用无人机载平台搭载可见光、 红外和偏振光多模成像设备全天候对预定区域进行大视角远距离快速扫描检测, 采用二维或三维建图技术形成一次区域坐标地图, 射击完成后再次使用无人机以相同视角对预定区域进行二次扫描检测形成二次区域坐标地图, 并针对未爆子弹药在区域图像中所占比例较小的问题, 利用图像处理手段对两次坐标地图进行滤波和增强, 排除背景干扰; 引入基于卷积神经网络模型对两次坐标地图进行连通和匹配, 标注差异点, 并根据二维/三维坐标地图信息精确计算出各差异点的坐标信息; 再次使用无人机载成像设备对各差异点的区域逐一进行小视角近距离扫描检测, 得到各差异点的图像信息, 与前期已有未爆子弹药的图像库进行算法比对, 输出识别出未爆子弹药的精确坐标位置。其具体工作流程如图10所示。
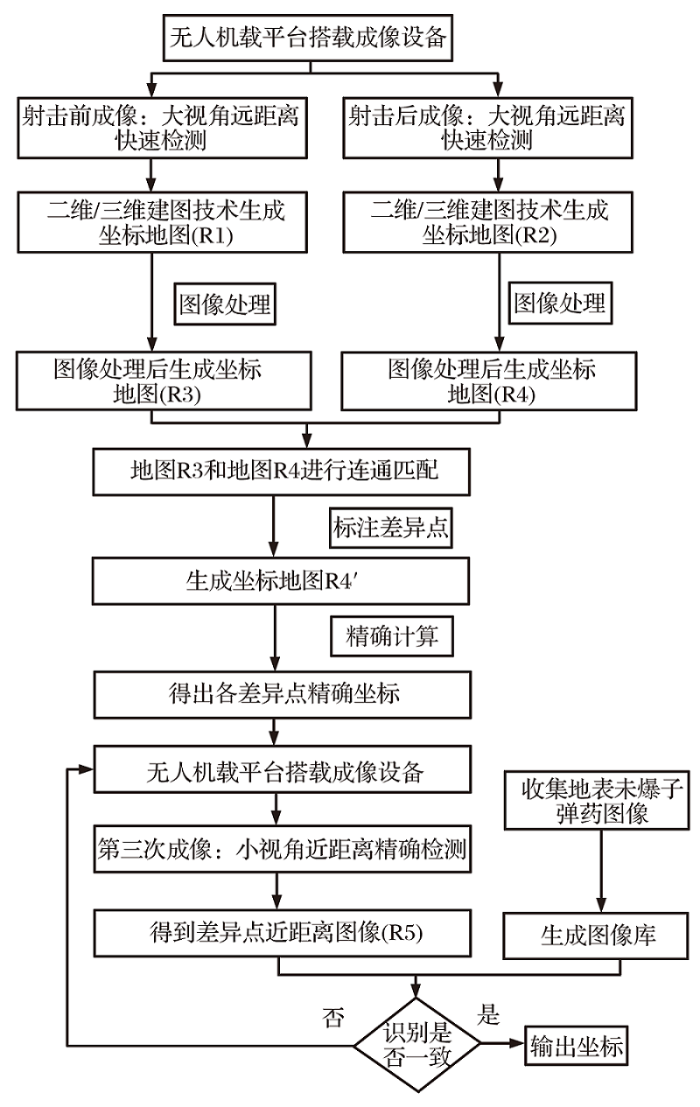
图10???未爆子弹药检测与识别定位技术流程图
该方法利用无人机载平台搭载可见光、 红外和偏振光多模成像设备进行区域扫描成像, 一方面, 相较于传统的人工平台地毯式扫描提高了检测速度, 降低了作业人员的危险性; 另一方面, 多模成像设备可以适应复杂天气条件, 提高作业环境适应性, 同时也可以相互验证检测结果, 提高检测精度。最后, 充分利用现有未爆子弹药图像数据库进行图像识别, 现有相关识别算法已经非常成熟, 软件安装即用, 硬件系统相对简单, 减少了作业人员参与对比识别, 提高了检测结果的可靠度。
4 结论
目前, 地表未爆子弹药检测技术仍然是传统的人工磁检测和电磁检测技术, 但是随着技术的成熟和作战要求的不断提高, 减少作战人员的安全风险, 提高地表未爆子弹药检测的精度及速度, 尤其是要满足打赢未来信息化条件下智能战争的现实需要, 综合运用多种成像技术和识别模型算法的“人工智能+”智能检测与识别定位技术将会是未来发展的主流。
声明:公众号转载的文章及图片出于非商业性的教育和科研目的供大家参考和探讨,并不意味着支持其观点或证实其内容的真实性。版权归原作者所有,如转载稿涉及版权等问题,请立即联系我们删除。
“人工智能技术与咨询”? ?发布
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- P5469 [NOI2019] 机器人 洛谷黑题题解
- 第十六章 : Spring Cloud集成 Spring Boot Admin的监控告警
- RTOS多线程操作的基本原理与实现
- 【一】从零到1设计一个丧葬行业小程序
- Mars3d的BusineDataLayer应该传data格式实现聚合效果
- easyui datagrid两次请求服务器的问题
- 浏览器缓存
- 如何画流程图?分享完整的流程和工具!
- 【从零开始学习Java重要知识 | 第三篇】暴打ReentrantLock底层源码
- 跨境商城系统如何开发代购商城、国际物流、一件代发等功能?